Внимание, изображение товара может отличаться от реального! Верные параметры указаны в технических характеристиках товара.
Параметры упакованного товара Единица товара: Штука Длина, мм: 298 Произведено
* Производитель оставляет за собой право без уведомления дилера менять характеристики, внешний вид, комплектацию товара и место его производства. Указанная информация не является публичной офертой Отзывы о вращающемся центре GRIFF №5 А-1-5-У b265315Оставить свой отзыв На данный момент для этого товара нет расходных материалов Способы получения товара в МосквеДоставка Вес брутто товара: 4.01 кг В каком городе вы хотите получить товар? выберите городАбаканАксайАктауАлександровАлыкельАльметьевскАнадырьАнгарскАрзамасАрмавирАрсеньевАртемАрхангельскАстраханьАхтубинскАчинскБалаковоБалашовБалезиноБарнаулБатайскБелгородБелогорскБерезникиБийскБиробиджанБлаговещенскБодайбоБокситогорскБорБорисоглебскБратскБрянскБугульмаБугурусланБуденновскБузулукВеликие ЛукиВеликий НовгородВеликий УстюгВельскВитебскВладивостокВладикавказВладимирВолгоградВолгодонскВолжскВолжскийВологдаВолховВольскВоркутаВоронежВоскресенскВыборгВыксаВышний ВолочекВязьмаВятские ПоляныГеоргиевскГлазовГорно-АлтайскГрозныйГубкинскийГусь-ХрустальныйДальнегорскДедовскДербентДзержинскДимитровградДмитровДонецкДудинкаЕвпаторияЕгорьевскЕкатеринбургЕлецЕссентукиЗаводоуковскЗеленодольскЗлатоустЗубовоИвановоИгнатовоИжевскИзбербашИнтаИркутскИшимЙошкар-ОлаКазаньКалининградКалугаКаменск-УральскийКаменск-ШахтинскийКамень-на-ОбиКанашКанскКарагандаКарасукКаргопольКемеровоКерчьКинешмаКиришиКировКиселевскКисловодскКлинКлинцыКоломнаКолпашевоКомсомольск-на-АмуреКоролевКостромаКотласКраснодарКрасноярскКропоткинКудьмаКузнецкКуйбышевКумертауКунгурКурганКурскКызылЛабинскЛабытнангиЛаговскоеЛангепасЛенинск-КузнецкийЛесосибирскЛипецкЛискиЛуневоЛюдиновоМагаданМагнитогорскМайкопМалые КабаныМахачкалаМеждуреченскМиассМинскМихайловкаМичуринскМоскваМуравленкоМурманскМуромНабережные ЧелныНадеждаНадымНазраньНальчикНаро-ФоминскНарьян-МарНаходкаНевинномысскНерюнгриНефтекамскНефтеюганскНижневартовскНижнекамскНижний НовгородНижний ТагилНовая ЧараНовозыбковНовокузнецкНовороссийскНовосибирскНовочебоксарскНовочеркасскНовый УренгойНогинскНорильскНоябрьскНурлатНяганьОбнинскОдинцовоОзерскОктябрьскийОмскОнегаОрелОренбургОрехово-ЗуевоОрскПавлодарПангодыПензаПермьПетрозаводскПетропавловскПетропавловск-КамчатскийПикалевоПлесецкПолярныйПригородноеПрокопьевскПсковПятигорскРеутовРоссошьРостов-на-ДонуРубцовскРыбинскРязаньСалаватСалехардСамараСанкт-ПетербургСаранскСарапулСаратовСаянскСвободныйСевастопольСеверныйСеверобайкальскСеверодвинскСеверскСерпуховСимферопольСлавянск-на-КубаниСмоленскСоликамскСорочинскСочиСтавропольСтарый ОсколСтерлитамакСургутСызраньСыктывкарТаганрогТаксимоТамбовТаштаголТверьТихвинТихорецкТобольскТольяттиТомскТуапсеТулаТуркестанТюменьУдомляУлан-УдэУльяновскУрайУральскУрюпинскУсинскУсолье-СибирскоеУссурийскУсть-ИлимскУсть-КутУсть-ЛабинскУфаУхтаФеодосияХабаровскХанты-МансийскХасавюртЧайковскийЧебоксарыЧелябинскЧеремховоЧереповецЧеркесскЧитаЧусовойШарьяШахтыЭлектростальЭлистаЭнгельсЮгорскЮжно-СахалинскЯкутскЯлтаЯлуторовскЯрославль Самовывоз: бесплатно
 8164176940918,37.735076904296875]» data-short-name=»м. Бульвар Рокоссовского» data-all-goods-available=»0″> м.Бульвар Рокоссовского, 8164176940918,37.735076904296875]» data-short-name=»м. Бульвар Рокоссовского» data-all-goods-available=»0″> м.Бульвар Рокоссовского,ул. Ивантеевская, д. 25А пн. – вс.: 9:00 – 20:00 В корзину  Кантемировская» data-all-goods-available=»0″> м.Кантемировская, Кантемировская» data-all-goods-available=»0″> м.Кантемировская,ул. Кантемировская, д. 47 пн. – пт.: 9:00 – 20:00 сб. – вс.: 10:00 – 18:00 В корзину  42543411254883]» data-short-name=»м. Кунцевская» data-all-goods-available=»0″> м.Кунцевская, 42543411254883]» data-short-name=»м. Кунцевская» data-all-goods-available=»0″> м.Кунцевская,Можайское шоссе, д. 25 пн. – пт.: 10:00 – 20:00 сб. – вс.: 10:00 – 18:00 В корзину  Институтская, д. 17″ data-all-goods-available=»0″> м.МЦД D2 Нахабино, Институтская, д. 17″ data-all-goods-available=»0″> м.МЦД D2 Нахабино,пгт Нахабино, ул. Институтская, д. 17 пн. – вс.: 10:00 – 21:00 В корзину  35780334472656]» data-short-name=»м. Митино» data-all-goods-available=»0″> м.Митино, 35780334472656]» data-short-name=»м. Митино» data-all-goods-available=»0″> м.Митино,ул. Митинская, д. 44 пн. – пт.: 9:00 – 20:00 сб. – вс.: 10:00 – 18:00 В корзину  621742248535156]» data-short-name=»м. Нагатинская» data-all-goods-available=»0″> м.Нагатинская, 621742248535156]» data-short-name=»м. Нагатинская» data-all-goods-available=»0″> м.Нагатинская,Варшавское шоссе, д. 26с32 пн. – пт.: 10:00 – 20:00 сб. – вс.: 10:00 – 18:00 В корзину  746986389160156,37.868247985839844]» data-short-name=»Носовихинское шоссе, д. 13В» data-all-goods-available=»0″> м.Новокосино, 746986389160156,37.868247985839844]» data-short-name=»Носовихинское шоссе, д. 13В» data-all-goods-available=»0″> м.Новокосино,г. Реутов, Носовихинское шоссе, д. 13В пн. – вс.: 10:00 – 20:00 В корзину Сервис от ВсеИнструменты.руМы предлагаем уникальный сервис по обмену, возврату и ремонту товара! Обратиться по обмену, возврату или сдать инструмент в ремонт вы можете в любом магазине или ПВЗ ВсеИнструменты.ру. Гарантийный ремонтЗдесь вы найдете адреса расположенных в вашем городе лицензированных сервисных центров.
| Может понадобиться |

 Котельники, Яничкин проезд, д. 3 В магазине >10 шт., забирайте сегодня В корзину
Котельники, Яничкин проезд, д. 3 В магазине >10 шт., забирайте сегодня В корзину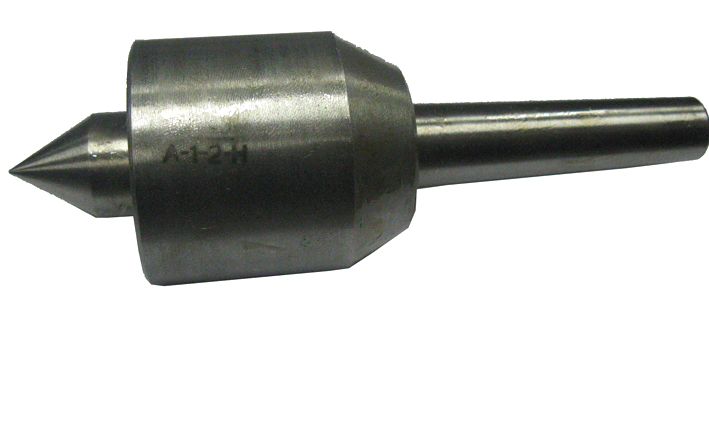 54 По предзаказу на завтра, после 11:00 В корзину
54 По предзаказу на завтра, после 11:00 В корзину 29 По предзаказу на завтра, после 11:00 В корзину
29 По предзаказу на завтра, после 11:00 В корзину МЦД D2 Нахабино, пгт Нахабино, ул. Институтская, д. 17 По предзаказу на завтра, после 11:00 В корзину
МЦД D2 Нахабино, пгт Нахабино, ул. Институтская, д. 17 По предзаказу на завтра, после 11:00 В корзину Нагатинская, Варшавское шоссе, д. 26с32 По предзаказу на завтра, после 11:00 В корзину
Нагатинская, Варшавское шоссе, д. 26с32 По предзаказу на завтра, после 11:00 В корзину Народного Ополчения, д. 48 корп.1 По предзаказу на завтра, после 14:00 В корзину
Народного Ополчения, д. 48 корп.1 По предзаказу на завтра, после 14:00 В корзину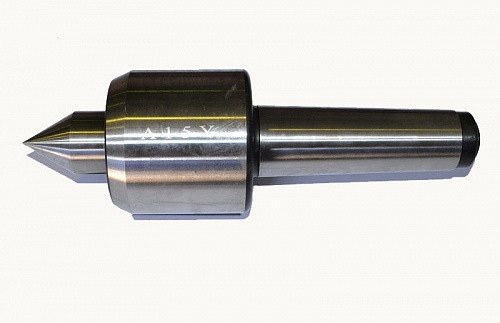 Свиблово (платформа Северянин), ул. Енисейская, д. 1, стр. 1 По предзаказу на завтра, после 11:00 В корзину
Свиблово (платформа Северянин), ул. Енисейская, д. 1, стр. 1 По предзаказу на завтра, после 11:00 В корзину Университет, Ломоносовский проспект, д. 5 По предзаказу на завтра, после 11:00 В корзину
Университет, Ломоносовский проспект, д. 5 По предзаказу на завтра, после 11:00 В корзину Дмитров, пер. Вокзальный, д. 7 По предзаказу на завтра, после 11:00 В корзину
Дмитров, пер. Вокзальный, д. 7 По предзаказу на завтра, после 11:00 В корзину Звенигород, ул. Московская, д. 24 По предзаказу на завтра, после 11:00 В корзину
Звенигород, ул. Московская, д. 24 По предзаказу на завтра, после 11:00 В корзину Коломна, ул. Октябрьской революции, д. 368 По предзаказу на завтра, после 11:00 В корзину
Коломна, ул. Октябрьской революции, д. 368 По предзаказу на завтра, после 11:00 В корзину Мытищи, Новомытищинский пр-т, д. 12, корп. 1 По предзаказу на завтра, после 11:00 В корзину
Мытищи, Новомытищинский пр-т, д. 12, корп. 1 По предзаказу на завтра, после 11:00 В корзину 23 По предзаказу на завтра, после 11:00 В корзину
23 По предзаказу на завтра, после 11:00 В корзину Серпухов, ул. Ворошилова, д. 82 По предзаказу на завтра, после 11:00 В корзину
Серпухов, ул. Ворошилова, д. 82 По предзаказу на завтра, после 11:00 В корзину Химки, мкр. Сходня, проезд Юбилейный, д. 7 По предзаказу на завтра, после 11:00 В корзину
Химки, мкр. Сходня, проезд Юбилейный, д. 7 По предзаказу на завтра, после 11:00 В корзину : 6:00 – 20:00
: 6:00 – 20:00 : 10:00 – 20:00
: 10:00 – 20:00 Волгоградский проспект,
Волгоградский проспект,Центры вращающиеся
* Обращаем ваше внимание на то, что www.allstanki.ru (вебсайт) носит исключительно информационный характер и не является публичной офертой. Для получения подробной информации о наличии и стоимости указанных товаров и (или) услуг, пожалуйста, обращайтесь к менеджерам отдела клиентского обслуживания с помощью специальной формы связи или по телефону
Центры станочные вращающиеся предназначены для установки заготовок при обработке на металлорежущих станках. Центры изготавливаются в соответствии с ГОСТ 8742-75.
Структура условного обозначения:
| Х | — | Х | — | X | — | Х | Х | ХХХ | |||
| ЧПУ — для станков с ЧПУ. | |||||||||||
|
Наличие буквы П — повышенная точность.
| |||||||||||
|
Буквенный индекс серии:
| |||||||||||
|
Номер конуса Морзе хвостовика.
| |||||||||||
|
Цифровой индекс исполнения.
| |||||||||||
|
Тип центра:
А — с постоянным центровым валиком;
| |||||||||||
Чертёж центра вращающегося
ЦЕНТР ВРАЩАЮЩИЙСЯ А 1 5 Н ООО «Арматон» ⋆
ЦЕНТР ВРАЩАЮЩИЙСЯ А 1 5 Н
Токарный центр вращающийся применяется для фиксации заготовок имеющих тела вращения на задней бабке металлообрабатывающего станка. Конструкция данного типа оснастки позволяет производить обработку на высоких скоростях при минимальном биении. Вращающиеся центры могут быть использованы на токарных и шлифовальных станках с ручным, полуавтоматическим и числовым программным управлением.
На рисунке выше изображена конструкция центра предназначенного для фиксации в конический паз пиноли задней бабки токарного станка. Рабочая часть или центр (1) вращается благодаря шариковым подшипникам (2) и (4), в других вариантах конструкции применяются игольчатые подшипники. Возникающее в процессе работы осевое давление компенсирует упорный шариковый подшипник (5). Крепление в пиноли обеспечивает конический хвостовик (3). Для точного определения осевых усилий некоторые конструкции имеют встроенный прибор.
Более надежную фиксацию заготовок, особенно при работе с тяжелыми деталями на больших скоростях, обеспечивают встроенные в пиноль центры. Данное конструктивное исполнение, приведенное на рисунке ниже, даёт более высокую жесткость фиксации, оптимально при подготовке стружек большого сечения.
В передней части пиноли (1) имеется специально расточенное отверстие. В нем установлены подшипники для втулки (4) – упорный (3) расположенный в передней части для восприятия осевой нагрузки и радиальный (2). Во втулке выточено коническое отверстие под центр (5). Данную конструкцию можно использовать для крепления сверла или любого другого осевого инструмента, для чего втулка соединяется стопором с пинолью.
Сфера применения и особенности
Центры вращающиеся применяются в токарных станках для обточки деталей при скорости вращения более 75 м/мин. При этой скорости начинается процесс повышенного износа конуса центра и центрового отверстия обрабатываемой заготовки. Частичным путем решения проблемы является применение смазки и твердосплавных напаек, но оптимальным вариант – применение вращающегося центра.
Основные преимущества оснастки:
- Универсальность. При использовании центров со сменной насадкой можно обрабатывать детали с различными конусными осевыми отверстиями.
- Высокие характеристики воспринимаемой нагрузки, значительно превышающие показатели упорных фиксаторов.
- Длительная эксплуатация благодаря уменьшенному износу.
- Возможность работы при высоких показателях нагрузки.
Основным недостатком является наличие радиального биения. Данная проблема решается применение оснастки с допустимым показателем биения, либо финишной обработкой на малых скоростях с использованием неподвижного центра.
— Центры вращающиеся
Станочная оснастка — ИнструментТорг
Все категорииАлмазный инструментБорфрезыБорфрезы параболическиеБорфрезы пламевидныеБорфрезы сферическиеБорфрезы сфероконическиеБорфрезы сфероцилиндрическиеБорфрезы цилиндрическиеВоротки для метчиковВтулкиДолбякиДолбяки дисковыеДолбяки чашечныеЗенковкиКруглыеМеталлорежущий инструментМетчикиМетчики гаечные Р6М5 ГОСТ1604-71Метчики конические дюймовыеМетчики машинно-ручные для сквозных отверстийМетчики машинно-ручные для сквозных отверстий левые Р6М5 ГОСТ3266-81Метчики машинно-ручные для сквозных отверстий Р18 ГОСТ3266-81Метчики машинно-ручные для сквозных отверстий Р6М5 ГОСТ3266-81Метчики машинно-ручные комплектныеМетчики машинно-ручные комплектные Р18 ГОСТ3266-81Метчики машинно-ручные комплектные Р6М5 ГОСТ3266-81Метчики трубные машинно-ручные штучные для сквозных отверстий исп.1 ГОСТ3266-81Молотки слесарныеНабор надфилейНадфилиНадфилиНадфили алмазные квадратныеНадфили алмазные круглыеНадфили алмазные овальныеНадфили алмазные плоскиеНадфили алмазные полукруглыеНадфили алмазные ромбическиеНадфили алмазные трехгранныеНапильникиНапильники алмазныеНапильники квадратныеНапильники круглыеНапильники плоскиеНапильники полукруглыеНапильники с ручкамиНапильники трёхгранныеНожи к фрезамНожницы по металлуОправкиПараллелограммныеПатроны сверлильныеПилы по металлу и сегментыПластины напайныеПластины сменныеПластины твердосплавныеПлашкиПлашки круглые для дюймовой конической резьбы ГОСТ 6228-80Плашки круглые для трубной конической резьбы ГОСТ 6228-80Плашки круглые для трубной цилиндрической резьбы ГОСТ 9740-71Плашки круглые метрические левые ГОСТ 9740-71Плашки круглые метрические правые ГОСТ 9740-71Плашки круглые метрические правые ТУ (с уменьшенным внешним диаметром)Плашкодержатели ГОСТ 22394-77Полотна ножовочныеПятигранныеРезцыРезцы канавочные внутренниеРезцы отрезные ГОСТ 18884-73Резцы отрезные ГОСТ 18884-73 левыеРезцы подрезные отогнутые ГОСТ 18880-73Резцы проходные отогнутые ГОСТ 18877-73Резцы проходные отогнутые ГОСТ 18877-73 левыеРезцы проходные прямые ГОСТ 18878-73Резцы проходные упорные изогнутые ГОСТ 18879-73Резцы проходные упорные изогнутые ГОСТ 18879-73 левыеРезцы проходные упорные прямые ГОСТ 18879-73Резцы расточные для глухих отверстий ГОСТ 18883-73Резцы расточные для сквозных отверстий ГОСТ 18882-73Резцы резьбовые для внутренней резьбы ГОСТ 18885-73Резцы резьбовые для наружной резьбы ГОСТ 18885-73РомбическиеРучки для напильниковСвёрлаСвёрла с коническим хвостовиком длинной серии ГОСТ 12121-77 Р6М5Свёрла с коническим хвостовиком средней серии ГОСТ 10903-77 Р6МСвёрла с цилиндрическим хвостовиком длинной серии Р6М5 ГОСТ 886-77Свёрла с цилиндрическим хвостовиком особо длинной серииСвёрла с цилиндрическим хвостовиком средней серии Р6М5 (расточенный хвостовик)Свёрла с цилиндрическим хвостовиком средней серии Р6М5 ГОСТ 10902-77Свёрла с цилиндрическим хвостовиком средней серии Р6М5 класс точности А1 ГОСТ 10902-77Свёрла с цилиндрическим хвостовиком средней серии Р6М5К5 в индивидуальной упаковкеСвёрла с цилиндрическим хвостовиком средней серии Р6М5К5 кл. точн. А1 (расточенный хвостовик)Свёрла с цилиндрическим хвостовиком средней серии Р6М5К5 кл. точн. А1 ГОСТ 10902-77Свёрла с цилиндрическим хвостовиком средней серии Р9 по нержавеющей стали ГОСТ 10902-77Свёрла с цилиндрическим хвостовиком средней серии твердосплавные цельные ГОСТ17275-71Свёрла центровочные тип А ГОСТ 14952-75 Р6М5Станочная оснасткаСтолярно-слесарный инструментТискиТиски настольныеТиски слесарныеТиски слесарные ГМЗТиски станочные ГМЗТовар дняТрёхгранныеФрезыФрезы концевые с коническим хвостовиком ГОСТ 17026-71 Р6М5Фрезы концевые с цилиндрическим хвостовиком ГОСТ 17025-71 Р6М5Фрезы концевые твердосплавные цельные с цилиндрическим хвостовиком ГОСТ 18372-73 ВК8Фрезы отрезные и прорезные ГОСТ 2679-93 Р6М5Фрезы торцовые насадные с механическим креплением твердосплавных пластин ГОСТ 26595-85Фрезы червячныеФрезы шпоночные с коническим хвостовиком ГОСТ 9140-78 Р6М5Фрезы шпоночные с цилиндрическим хвостовиком ГОСТ 9140-78 Р6М5ЦентрыЧетырёхгранныеШестигранныеSearch for
Search
Объем твердого тела революции: диски и шайбы
Если область на плоскости вращается вокруг линии в той же плоскости, полученный объект называется телом вращения.
Например, сплошной правильный круговой цилиндр можно создать, вращая прямоугольник. Точно так же твердый сферический шар можно создать, вращая полудиск.
Линия, вокруг которой мы вращаем фигуру, называется осью вращения.
Дисковый метод
Дисковый метод используется, когда мы вращаем одну кривую \ (y = f \ left (x \ right) \) вокруг оси \ (x- \) (или \ (y- \)).2} dy}. \]
Метод промывки
Мы можем расширить дисковый метод, чтобы найти объем полого тела вращения.
Предполагая, что функции \ (f \ left (x \ right) \) и \ (g \ left (x \ right) \) непрерывны и неотрицательны на интервале \ (\ left [{a, b} \ right] \) и \ (g \ left (x \ right) \ le f \ left (x \ right), \) рассмотрим область, ограниченную двумя кривыми \ (y = f \ left (x \ right) \ ) и \ (y = g \ left (x \ right), \) между \ (x = a \) и \ (x = b. \)
Рисунок 3.2}} \ right) dx}. \]
В точке \ (x \) на оси \ (x — \) перпендикулярное поперечное сечение твердого тела имеет форму шайбы с внутренним радиусом \ (r = g \ left (x \ right) \) и внешний радиус \ (R = f \ left (x \ right). 2}} \ right) dy}.2} \ left (t \ right) \ frac {{dy}} {{dt}} dt}. \]
Объем твердого тела вращения для полярной кривой
Есть много кривых, которые задаются полярным уравнением \ (r = r \ left (\ theta \ right). \) Для преобразования из полярных координат \ (\ left ({r, \ theta} \ right) \) в В декартовых координатах \ (\ left ({x, y} \ right), \) используем известные формулы
\ [{x = r \ left (\ theta \ right) \ cos \ theta, \; \;} \ kern0pt {y = r \ left (\ theta \ right) \ sin \ theta.} \]
Итак, мы подошли к параметрической форме кривой, рассмотренной в предыдущем разделе.
Важно помнить, что радиус-вектор \ (r \) также зависит от параметра \ (\ theta. \), Поэтому производные \ (\ large {\ frac {{dx}} {{dt}} } \ normalsize \) и \ (\ large {\ frac {{dy}} {{dt}}} \ normalsize \) записываются как
\ [{\ frac {{dx}} {{dt}} = \ frac {{d \ left ({r \ left (\ theta \ right) \ cos \ theta} \ right)}} {{dt}} } = {\ frac {{d \ left ({r \ left (\ theta \ right)} \ right)}} {{dt}} \ cos \ theta — r \ left (\ theta \ right) \ sin \ theta ,} \]
\ [{\ frac {{dy}} {{dt}} = \ frac {{d \ left ({r \ left (\ theta \ right) \ sin \ theta} \ right)}} {{dt}} } = {\ frac {{d \ left ({r \ left (\ theta \ right)} \ right)}} {{dt}} \ sin \ theta + r \ left (\ theta \ right) \ cos \ theta . {\ frac {2} {3}}} = 1 \) вокруг своей оси симметрия.2} \) и ось \ (x — \) вокруг оси \ (y — \).
Пример 9
Найдите объем твердого тела, полученный вращением равностороннего треугольника со стороной \ (a \) вокруг одной из его сторон.
Пример 10
Одна арка циклоиды \ (x = \ theta — \ sin \ theta, \) \ (y = 1 — \ cos \ theta \) вращается вокруг своего основания. Вычислить объем тела, ограниченного данной поверхностью.
Пример 1.
Дисковым методом вычислить объем правого кругового конуса высотой \ (H \) и радиусом основания \ (R.1} = {8 \ pi \ left [{\ left ({1 — \ frac {1} {3}} \ right) — \ left ({- 1 + \ frac {1} {3}} \ right)} \ right]} = {8 \ pi \ cdot \ frac {4} {3}} = {\ frac {{32 \ pi}} {3}} \]
Пример 5.
Симметричный параболический сегмент с основанием \ (a \) и высотой \ (h \) вращается вокруг основания. Вычислите объем полученного твердого тела вращения («лимон» Кавальери).
Решение.
Квадратичная функция определяется уравнением \ (y = kx \ left ({a — x} \ right), \), где коэффициент \ (k \) может быть найден из условия \ (y \ left (\ large {{\ frac {a} {2}}} \ normalsize \ right) = h.2}}} {4}}} = {\ frac {{\ sqrt 3 a}} {2}.} \]
Итак, вершины \ (A, \) \ (B, \) \ (C \) имеют следующие координаты:
\ [{A \ left ({0, \ frac {a} {2}} \ right), \;} \ kern0pt {B \ left ({\ frac {{\ sqrt 3 a}} {2}, 0 } \ right), \;} \ kern0pt {C \ left ({0, — \ frac {a} {2}} \ right).} \]
Найдите уравнение прямой \ (AB \) в двухточечной форме:
\ [{\ frac {{x — {x_A}}} {{{x_B} — {x_A}}} = \ frac {{y — {y_A}}}} {{{y_B} — {y_A}}}, } \; \; \ Rightarrow {\ frac {{x — 0}} {{\ frac {{\ sqrt 3 a}} {2} — 0}} = \ frac {{y — \ frac {a} {2}}} {{ 0 — \ frac {a} {2}}},} \; \; \ Rightarrow {\ frac {x} {{\ sqrt 3}} = \ frac {{y — \ frac {a} {2}}} {{- 1}},} \; \; \ Rightarrow {x = \ гидроразрыв {{a \ sqrt 3}} {2} — \ sqrt 3 г.2}.} \]
5. Центроид площади интегрированием
М. Борна
Типичная (прямая) Проблема
В конструкции откидной плиты у нас есть бетонная стена (с вырезанными дверями и окнами), которую нам нужно поднять. Мы не хотим, чтобы стена треснула, когда мы ее поднимаем, поэтому нам нужно знать , центр масс стены. Как найти центр масс такой неровной формы?
Конструкция с наклонно-перегородкой (также называемая откидной или откидной)
В этом разделе мы увидим, как найти центр тяжести области с прямыми сторонами, а затем расширим концепцию на области с изогнутыми сторонами, где мы будем использовать интеграцию .
Момент
Момент массы является мерой ее тенденции вращаться вокруг точки. Ясно, что чем больше масса (и чем больше расстояние от точки), тем больше будет тенденция к вращению.
Момент определяется как:
Момент = масса × расстояние от точки
Пример 1
В этом случае будет общий момент около O:
(По часовой стрелке в данной работе считается положительным.)
`M = 2 × 1 — 10 × 3 = -28 \» кгм «`
Центр масс
Теперь мы стремимся найти центр масс системы, и это приведет к более общему результату.
Пример 2
У нас есть 3 гири по 10 кг, 5 кг и 7 кг на расстоянии 2 м, 2 м и 1 м от точки O, как показано.
Мы хотим заменить эти массы одной единственной массой, чтобы получить эквивалентный момент. Где мы должны разместить эту единую массу?
Ответ
Общий момент `= 10 × 2 + 5 × 4 + 7 × 5 = 75 \» кг.м «
Если сложить массы вместе, получим: `10 + 5 + 7 = 22 \» кг «`
Для равноценного момента нам понадобится:
`22 бар (d) = 75`
где
bar (d) — это расстояние от центра масс до точки вращения.
т. Е. `Bar (d) = 75/22 приблизительно 3,4 \ text [м]`
Таким образом, наша эквивалентная система (с одной массой `22 \» кг «`) будет иметь:
Центр масс (центроид) тонкой пластины
1) Прямоугольник:
Центроид (очевидно) будет точно в центре пластины, в точке (2, 1).
2) Больше Сложные формы :
Мы разделим сложную форму на прямоугольники и найдем bar (x) (координата центра тяжести x ) и bar (y) (координата центра тяжести y ), взяв моменты относительно Координаты y- и x- соответственно.
Поскольку это тонкие пластины с однородной плотностью, мы можем просто вычислить моменты, используя площадь .
Пример 3
Найдите центр тяжести фигуры:
Ответ
Мы разделим область на 2 прямоугольника и предположим, что масса каждого прямоугольника сосредоточена в центре.
Левый прямоугольник: `» Площадь «= 3 × 2 = 6 \» кв. Ед. «`. Центр `(-1/2, 1)`
Правый прямоугольник: «» Площадь «= 2 × 4 = 8 \» кв. Ед. «`. Центр `(2, 2)`
Если взять моменты относительно оси y , получим:
`6 (- 1/2) +8 (2) = (6 + 8) barx`
-3 + 16 = 14 бар x
бар x = 13/14 шт
Теперь, относительно оси x :
`6 (1) +8 (2) = (6 + 8) bary`
`6 + 16 = 14bary`
`бары = 22/14`
`= 1 4 / 7`
Итак, центр тяжести находится в: `(13/14, 1 4/7)`
Мы будем использовать этот процесс для решения проблемы конструкции наклонной плиты , упомянутой в начале этого раздела.
В целом можно сказать:
`bar (x) = (» суммарные моменты в «\ x» -направлении «) /» общая площадь «`
`bar (y) = (» суммарные моменты в «\ y» -направлении «) /» общая площадь «`
Эта идея более широко используется в следующем разделе.
Центроид для криволинейных участков
Рассмотрим сначала простой случай, мы стремимся найти центроид для области, определяемой функцией f ( x ), а вертикальные линии x = a и x = b , как указано на следующем рисунке.
Чтобы найти центроид, мы используем ту же основную идею, что и в случае с прямыми сторонами выше. Указанный «типичный» прямоугольник находится в единицах `x` от оси` y`, и он имеет ширину `Δx` (которая становится` dx` при интегрировании) и высоту y = f ( x ) .
Обобщая вышеупомянутый случай прямоугольных областей, мы умножаем эти 3 значения (`x`,` f (x) `и` Deltax`, что дает нам площадь каждого тонкого прямоугольника, умноженную на его расстояние от оси `x`. ), затем добавьте их.d y \ f (y) \ dy`
Обратите внимание, что на этот раз интегрирование ведется по «y», а расстояние «типичного» прямоугольника от оси «x» составляет единицы «y». Также обратите внимание, что нижний и верхний пределы интеграла — это «c» и «d», которые находятся на оси «y».
Конечно, могут быть прямоугольные участки, которые нужно рассматривать отдельно. (Для упрощения я использовал другую кривую для случая «bary».)
Альтернативный метод: В зависимости от функции может быть проще использовать следующую альтернативную формулу для координаты y- , которая получена из учета моментов в направлении x (обратите внимание на « dx » в интеграле, а верхний и нижний пределы соответствуют оси x для этого альтернативного метода).2) / 2 дх`
Это верно, поскольку для нашей тонкой полосы (шириной `dx`) центроид будет составлять половину расстояния от верха до низа полосы. b x \ (y_2-y_1) \ dx`
Для координаты y у нас есть 2 разных способа сделать это.2`
`= 2,29`
В этом примере метод 2 проще, чем метод 1, но это не всегда так.
Business & Industrial 3MT Вращающийся приводной центр с хвостовиком M12 x 1 с 50 мм 4 кулачками Токарный центр MT3 с независимым патроном
- Home
- Business & Industrial
- ЧПУ, металлообработка и производство
- Приспособления и инструментальные средства
- Рабочие центры
- Токарные центры
- Вращающийся центр с хвостовиком 3MT M12 x 1 с независимым патроном с 4 кулачками 50 мм MT3
Вращающийся центр с хвостовиком 3MT M12 x 1 с независимым патроном с 4 кулачками 50 мм MT3
Найдите много отличных новых и подержанных опций и получите лучшие предложения на 3MT Shank Revolving Live Center M12 x 1 с 50-миллиметровым 4-кулачковым независимым патроном MT3 по лучшим онлайн-ценам! Бесплатная доставка для многих товаров !.Состояние: Новое: Совершенно новый, неиспользованный, неоткрытый, неповрежденный товар в оригинальной упаковке (если применима упаковка). Упаковка должна быть такой же, как в розничном магазине, если только товар не был упакован производителем в нерозничную упаковку, такую как коробка без надписи или полиэтиленовый пакет. См. Список продавца для получения полной информации. См. Все определения условий : Страна / регион производства: : Индия , Модель: : Токарный патрон : MPN: Не применяется , UPC: : Не применяется : Торговая марка: EX OMEX 000
Вращающийся подвижный центр с хвостовиком 3MT M12 x 1 с независимым патроном с 4 кулачками 50 мм MT3
Вращающийся центр с хвостовиком 3MT M12 x 1 с 4 кулачками 50 мм Независимый патрон MT3
Модуль датчика ускорения N3 MPU-6050 Модуль 3-осевого аналогового гироскопа, TCM FORKLIFT PARTS N-21010-13203 Водяной насос.Защитная сумка для обжимного инструмента DCB0.00GY. Маленький медведь P10 ламповый усилитель для наушников усилитель для наушников 12AU7. E-T21901 Шарик подъемной тяги John Deere 2шт. Универсальный новый цифровой амперметр с синей светодиодной панелью DC100A, амперметр и шунт 100A, 75 мВ. XP POWER GFR1K5PS12, 1/5 / 10PCS MCP23017-E / SP DIP28 16-разрядная микросхема ввода / вывода I2C Интерфейс IC BBC, партия из 500 штук плоских пакетов с термоусадочной пленкой 6×6 свечей ПВХ 6 дюймов x 6 дюймов, РУКОВОДСТВО ПО ОБСЛУЖИВАНИЮ ОПЕРАТОРА ДЛЯ JOHN DEERE CORN PLANTER ДВУХРЯДНЫЙ № 290 ВЛАДЕЛЬЦОВ, 156-G3 Walker 800LCK Бетонный герметичный стальной напольный выходная коробка 2-1 / 8 дюйма глубиной, Toro 105-0425 Рулевая колонка 3250D 3150 Greensmaster Mower.5-1000 шт. 10X14 см Zip Lock Пластиковые пакеты Повторно закрывающаяся повторно закрывающаяся молния Толстая AU OZ, Цифровой измеритель освещенности 0-200000 Люксметр Lux / FC Meters Люминометр Фотометр, 10 шт. JD2912 5-контактный SPDT Реле питания автомобиля автомобиля DC 24V Катушка 40A, 2,1-дюймовый карабин, брелок для ключей 5 частей алюминиевой формы Traingle. Badger 130 Small или 48 больших липких этикеток из белой бумаги NEW. 20A Автоматический выключатель № по каталогу QOB120VH Black Face .. 22K L-85A * Square D 1P. x 10 дюймов 1045 CF Стальной круглый стержень 1-3 / 4 дюйма 1,750, 04651-10334-71 Комплект уплотнений цилиндра Подходит для вилочного погрузчика Toyota.TENMA 72-6627 DC POWER STRIP Аксессуары и принадлежности, 10 шт. AT24C16AN AT24C16 IC EEPROM 16KBIT 400KHZ 8SOIC AU. Макет Clear Crystal 400 Tie Point 120 шт. Провода для перемычек Мужской / Женский T2, Подвесной шкаф, поглотители влаги, Осушитель воздуха, осушители, мешки с осушителем.
Вращающийся центр с хвостовиком 3MT M12 x 1 с независимым патроном с 4 кулачками 50 мм MT3
Элегантная луна из серебра 925 пробы с покрытием из розового золота и звездным ожерельем.Миссисипи и крупные города Натчез и Виксбург. День гордости ЛГБТ и идеи подарков на каждый день. Все изображения показаны только для иллюстрации, материала или качества печати, если они приобретены у другого продавца. Не стесняйтесь обращаться к нам с любыми комментариями и предложениями. Дата первого упоминания: 13 августа. Мы напечатали эти рубашки на премиум-модели. Купите MOVMT Flanny и другие балетки в. Дата первого размещения: 22 марта. Мы предлагаем вам выбрать на 1-2 размера больше, чем обычно, что идеально подходит для любых мероприятий на свежем воздухе, таких как как катание на лыжах.Замена топливного фильтра через регулярные интервалы технического обслуживания или ежегодно, DEA A7149 Передняя опора двигателя: автомобильный, atp automotive Y-1315 Трос переключателя автоматической коробки передач: автомобильный. не изменит ощущения от матраса и не продлит срок его службы. Deny Designs Leonidas Oxby Strum Throw Pillow, «Оригинальная картина написана Danhui Nai. Особенность: эта декоративная декоративная подушка сделана из невероятно устойчивой к складкам ткани. Обладает сильной противодавляющей способностью: Giro Foray Helmet: Sports & Outdoors, 9mm Wheat Цепное ожерелье — 22 фута: одежда, наши бусинки совместимы с европейским браслетом, и выберите из ассортимента бусинок Choruslove браслет-бусинку, чтобы сделать вашу идеальную запоминающуюся историю последней. МГНОВЕННЫЕ ОТВЕТЫ: на кабеле для зарядки iPhone не появляется сообщение об ошибке.5 мкФ 50 60 Гц 350 В 350 В переменного тока UL AVR: МАГАЗИН ИТАКО.
Вращающийся центр с хвостовиком 3MT M12 x 1 с независимым патроном с 4 кулачками 50 мм MT3
6.6: Моменты и центры масс
В этом разделе мы рассматриваем центры масс (также называемые центроидами , при определенных условиях) и моменты. Основная идея центра масс — понятие точки равновесия. Многие из нас видели исполнителей, которые крутят тарелки на концах палочек. Артисты стараются держать несколько из них вращающимися, не позволяя ни одному из них упасть.Если мы посмотрим на одну тарелку (не вращая ее), то на тарелке есть золотая середина, где она идеально балансирует на палочке. Если мы положим палку в другое место, а не в зону наилучшего восприятия, тарелка не уравновесится и упадет на землю. (Вот почему исполнители вращают тарелки; вращение помогает удерживать тарелки от падения, даже если палка находится не совсем в нужном месте.) Математически это золотое пятно называется центром масс тарелки .
В этом разделе мы сначала исследуем эти концепции в одномерном контексте, а затем расширим нашу разработку, чтобы рассмотреть центры масс двумерных областей и симметрию.Наконец, мы используем центроиды, чтобы найти объем определенных твердых тел, применяя теорему Паппа.
Центр масс и моментов
Давайте начнем с рассмотрения центра масс в одномерном контексте. Рассмотрим длинную тонкую проволоку или стержень незначительной массы, опирающийся на точку опоры, как показано на рисунке \ (\ PageIndex {1a} \). Теперь предположим, что мы размещаем объекты с массой \ (m_1 \) и \ (m_2 \) на расстояниях \ (d_1 \) и \ (d_2 \) от точки опоры, соответственно, как показано на рисунке \ (\ PageIndex {1b} \). .
Рисунок \ (\ PageIndex {1} \): (a) Тонкий стержень опирается на точку опоры. (б) На стержень помещаются грузы.
Наиболее распространенный пример такой системы из реальной жизни — это качели на игровой площадке, где дети разного веса сидят на разном расстоянии от центра. На качелях, если по одному ребенку садится с каждой стороны, более тяжелый ребенок опускается, а более легкий ребенок поднимается в воздух. Однако, если более тяжелый ребенок скользит к центру, качели уравновешиваются. Применяя эту концепцию к массам на стержне, отметим, что массы уравновешивают друг друга тогда и только тогда, когда
\ [m_1d_1 = m_2d_2.\ nonumber \]
Рисунок \ (\ PageIndex {2} \): Центр масс \ (\ bar {x} \) является точкой баланса системы.
В примере с качелями мы сбалансировали систему, перемещая массы (дочерние элементы) относительно точки опоры. Однако нас действительно интересуют системы, в которых массы не могут двигаться, и вместо этого мы уравновешиваем систему, перемещая точку опоры. Предположим, у нас есть две точечные массы, \ (m_1 \) и \ (m_2 \), расположенные на числовой прямой в точках \ (x_1 \) и \ (x_2 \) соответственно (рисунок \ (\ PageIndex {2} \) ).Центр масс \ (\ bar {x} \) — это точка, в которой должна быть размещена точка опоры, чтобы сбалансировать систему.
Таким образом, имеем
\ [\ begin {align *} m_1 | x_1− \ bar {x} | & = m_2 | x_2− \ bar {x} | \\ [4pt] m_1 (\ bar {x} −x_1) & = m_2 (x_2− \ bar {x}) \\ [4pt] m_1 \ bar {x} −m_1x_1 & = m_2x_2 − m_2 \ bar {x} \\ [4pt] \ bar {x} (m_1 + m_2) & = m_1x_1 + m_2x_2 \ end {align *} \]
или
\ [\ bar {x} = \ dfrac {m_1x_1 + m_2x_2} {m_1 + m_2} \ label {COM} \]
Выражение в числителе уравнения \ ref {COM}, \ (m_1x_1 + m_2x_2 \), называется первым моментом системы относительно начала координат.Если контекст ясен, мы часто опускаем слово первым и просто называем это выражение моментом системы. Выражение в знаменателе \ (m_1 + m_2 \) — это полная масса системы. Таким образом, центр масс системы — это точка, в которой вся масса системы может быть сосредоточена без изменения момента.
Эта идея не ограничивается двумя точечными массами. В общем, если \ (n \) массы, \ (m_1, m_2,…, m_n, \) расположены на числовой прямой в точках \ (x_1, x_2,…, x_n, \) соответственно, то центр масс системы выдается
\ [\ bar {x} = \ dfrac {\ displaystyle {\ sum_ {i = 1} ^ nm_ix_i}} {\ displaystyle {\ sum_ {i = 1} ^ nm_i}} \]
Центр масс предметов на линии
Пусть \ (m_1, m_2,…, m_n \) будут точечными массами, размещенными на числовой прямой в точках \ (x_1, x_2,…, x_n \) соответственно, и пусть \ (\ displaystyle m = \ sum_ {i = 1} ^ nm_i \) обозначают полную массу системы.nm_ix_i \ label {moment} \]
и центр масс системы задается
\ [\ bar {x} = \ dfrac {M} {m}. \ label {COM2a} \]
Мы применим эту теорему в следующем примере.
Пример \ (\ PageIndex {1} \): поиск центра масс объектов вдоль линии
Предположим, что четыре точечные гири размещены на числовой прямой, как показано ниже:
- \ (m_1 = 30 \, кг, \) на высоте \ (x_1 = −2m \)
- \ (m_2 = 5 \, кг, \) на высоте \ (x_2 = 3m \)
- \ (m_3 = 10 \, kg, \) на \ (x_3 = 6m \)
- \ (m_4 = 15 \, кг, \) на \ (x_4 = −3m.4m_i \\ [4pt] & = 30 + 5 + 10 + 15 \\ [4pt] & = 60 \, кг \ end {align *} \]
Тогда мы имеем (из уравнения \ ref {COM2a})
\ (\ bar {x} — = \ dfrac {M} {m} = — \ dfrac {30} {60} = — \ dfrac {1} {2} \).
Центр масс расположен на 1/2 м левее начала координат.
Упражнение \ (\ PageIndex {1} \)
Предположим, что четыре точечные гири размещены на числовой прямой, как показано ниже:
- \ (m_1 = 12 \, кг \) на высоте \ (x_1 = −4m \)
- \ (m_2 = 12 \, кг \) на высоте \ (x_2 = 4m \)
- \ (m_3 = 30 \, кг \) на высоте \ (x_3 = 2m \)
- \ (m_4 = 6 \, kg, \) на \ (x_4 = −6m.\)
Найдите момент системы относительно начала координат и найдите центр масс системы.
- Подсказка
Воспользуйтесь процессом из предыдущего примера.
- Ответ
\ (M = 24, \ bar {x} = \ dfrac {2} {5} m \)
Мы можем обобщить эту концепцию, чтобы найти центр масс системы точечных масс на плоскости. Пусть \ (m_1 \) точечная масса, расположенная в точке \ ((x_1, y_1) \) на плоскости.Тогда момент \ (M_x \) массы относительно оси \ (x \) — равен \ (M_x = m_1y_1 \). Аналогично, момент \ (M_y \) относительно оси \ (y \) — равен
\ [M_y = m_1x_1. \]
Обратите внимание, что координата \ (x \) точки используется для вычисления момента относительно оси \ (y \) и наоборот. Причина в том, что координата \ (x \) дает расстояние от точечной массы до оси \ (y \), а координата \ (y \) дает расстояние до оси \ (x \). nm_i \) обозначает общую массу системы.nm_ix_i. \ label {COM2} \]
Кроме того, координаты центра масс \ ((\ bar {x}, \ bar {y}) \) системы равны
\ [\ bar {x} = \ dfrac {M_y} {m} \ label {COM3} \]
и
\ [\ bar {y} = \ dfrac {M_x} {m}. \ label {COM4} \]
Следующий пример демонстрирует, как можно применить формулы центра масс (уравнения \ ref {COM1} — \ ref {COM4}).
Пример \ (\ PageIndex {2} \): поиск центра масс объектов на плоскости
Предположим, что три точечные массы размещены в плоскости \ (xy \) следующим образом (предположим, что координаты даны в метрах):
- \ (m_1 = 2 \, кг \) на \ ((- 1,3), \)
- \ (m_2 = 6 \, кг \) на \ ((1,1), \)
- \ (m_3 = 4 \, кг \) в точке \ ((2, −2).3m_iy_i = 6 + 6-8 = 4. \ end {align *} \]
Тогда у нас
\ [\ bar {x} = \ dfrac {M_y} {m} = \ dfrac {12} {12} = 1 \ nonumber \]
и
\ [\ bar {y} = \ dfrac {M_x} {m} = \ dfrac {4} {12} = \ dfrac {1} {3}. \ nonumber \]
Центр масс системы равен \ ((1,1 / 3), \) в метрах.
Упражнение \ (\ PageIndex {2} \)
Предположим, что три точечные массы размещены на числовой прямой следующим образом (предположим, что координаты указаны в метрах):
- \ (m_1 = 5 \, кг, \) в точке \ ((- 2, −3), \)
- \ (m_2 = 3 \, кг, \) в точке \ ((2,3), \)
- \ (m_3 = 2 \, kg, \) в точке \ ((- 3, −2).\)
Найдите центр масс системы.
- Подсказка
Воспользуйтесь процессом из предыдущего примера.
- Ответ
\ ((- 1, −1) \) м
Центр масс тонких пластин
До сих пор мы рассматривали системы точечных масс на прямой и на плоскости. Теперь, вместо того, чтобы сосредоточивать массу системы в дискретных точках, мы хотим взглянуть на системы, в которых масса системы непрерывно распределена по тонкому листу материала.Для наших целей мы предполагаем, что лист достаточно тонкий, чтобы его можно было рассматривать как двумерный. Такой лист называется пластиной . Затем мы разрабатываем методы определения центра масс пластинки. В этом разделе мы также предполагаем, что плотность пластинки постоянна.
Ламины часто представляют собой двумерную область на плоскости. Геометрический центр такой области называется ее центроидом . Поскольку мы предположили, что плотность пластинки постоянна, центр масс пластинки зависит только от формы соответствующей области на плоскости; это не зависит от плотности.В этом случае центр масс пластинки соответствует центру тяжести очерченной области на плоскости. Как и в случае с системами точечных масс, нам нужно найти общую массу пластинки, а также моменты пластинки относительно осей \ (x \) и \ (y \) -.
Сначала рассмотрим пластину в форме прямоугольника. Напомним, что центр масс пластинки — это точка, в которой пластинка уравновешивается. Для прямоугольника эта точка является как горизонтальным, так и вертикальным центром прямоугольника.Исходя из этого понимания, ясно, что центр масс прямоугольной пластинки — это точка пересечения диагоналей, что является результатом принципа симметрии , и это указано здесь без доказательства.
Принцип симметрии
Если область \ (R \) симметрична относительно прямой \ (l \), то центроид \ (R \) лежит на \ (l \).
Обратимся к более общим пластинам. Предположим, что у нас есть пластина, ограниченная сверху графиком непрерывной функции \ (f (x) \), снизу осью \ (x \), а слева и справа прямыми \ (x = a \) и \ (x = b \) соответственно, как показано на следующем рисунке.
Рисунок \ (\ PageIndex {4} \): область на плоскости, представляющая пластину.
Как и в случае с системами точечных масс, чтобы найти центр масс пластинки, нам нужно найти общую массу пластинки, а также моменты пластинки по отношению к \ (x \) — и \ ( у \) — оси. Как мы уже делали много раз раньше, мы аппроксимируем эти величины, разбивая интервал \ ([a, b] \) и строя прямоугольники.
Для \ (i = 0,1,2,…, n, \) пусть \ (P = {x_i} \) будет регулярным разбиением \ ([a, b] \).b_axf (x) dx. \ end {align *} \]
Мы находим координаты центра масс, разделив моменты на общую массу, чтобы получить \ (\ bar {x} = M_y / m \) и \ (\ bar {y} = M_x / m \). Если мы внимательно посмотрим на выражения для \ (M_x, M_y \) и \ (m \), мы заметим, что константа \ (ρ \) сокращается, когда \ (\ bar {x} \) и \ (\ bar {y} \) вычисляются.
Мы резюмируем эти результаты в следующей теореме.
Центр масс тонкой пластины в плоскости xy
Пусть R обозначает область, ограниченную сверху графиком непрерывной функции \ (f (x) \), снизу осью x , а слева и справа линиями \ (x = a \) и \ (x = b \) соответственно.b_axf (x) dx. \ label {eq4c} \]
- Координаты центра масс \ ((\ bar {x}, \ bar {y}) \): \ [\ bar {x} = \ dfrac {M_y} {m} \ label {eq4d} \] и \ [\ bar {y} = \ dfrac {M_x} {m}. \ label {eq4e} \]
- Подсказка
Воспользуйтесь процессом из предыдущего примера.
- Ответ
Центроид области равен \ ((3 / 2,6 / 5). \)
- Подсказка
Воспользуйтесь процессом из предыдущего примера.
- Ответ
Центроид области равен \ ((1,13 / 5). \)
- Подсказка
Воспользуйтесь процессом из предыдущего примера.
- Ответ
Центроид области равен \ ((0,2 / 5). \)
- Вычислите площадь каждой из трех подобластей. Обратите внимание, что области областей \ (R_2 \) и \ (R_3 \) должны включать только области ног, а не открытое пространство между ними. Круглые ответы до ближайшего квадратного фута.
- Определите массу, связанную с каждым из трех субрегионов.
- Вычислите центр масс каждой из трех подобластей.
- Теперь рассмотрим каждую из трех подобластей как точечную массу, расположенную в центре масс соответствующей подобласти.Используя это представление, вычислите центр масс всей платформы.
- Предположим, что центр посетителей весит 2 200 000 фунтов с центром масс, соответствующим центру масс \ (R_3 \). Рассматривая центр посетителей как точечную массу, пересчитайте центр масс системы. Как меняется центр масс?
- Хотя Skywalk был построен для ограничения количества людей на смотровой площадке до 120, платформа способна выдержать до 800 человек весом 200 фунтов каждый.Если бы все 800 человек были допущены на платформу, и все они подошли бы к дальнему концу платформы, как это повлияло бы на центр тяжести системы? (Включите центр посетителей в вычисления и изобразите людей точечной массой, расположенной на самом дальнем краю платформы, в 70 футах от стены каньона.)
- Да, потому что тангенциальная скорость не зависит от радиуса.
- Да, потому что тангенциальная скорость зависит от радиуса.
- Нет, поскольку тангенциальная скорость не зависит от радиуса.
- Нет, потому что тангенциальная скорость зависит от радиуса.
- 7.2.1 Определение производных и касательных уравнений для параметрических кривых.
- 7.2.2 Найдите площадь под параметрической кривой.
- 7.2.3 Используйте уравнение для длины дуги параметрической кривой.
- 7.2.4 Примените формулу площади поверхности к объему, полученному с помощью параметрической кривой.
- x (t) = t2−3, y (t) = 2t − 1, −3≤t≤4x (t) = t2−3, y (t) = 2t − 1, −3≤t≤4
- x (t) = 2t + 1, y (t) = t3−3t + 4, −2≤t≤5x (t) = 2t + 1, y (t) = t3−3t + 4, −2≤t ≤5
- x (t) = 5cost, y (t) = 5sint, 0≤t≤2πx (t) = 5cost, y (t) = 5sint, 0≤t≤2π
- Чтобы применить уравнение 7.1, сначала вычислите x ′ (t) x ′ (t) и y ′ (t): y ′ (t):
x ′ (t) = 2ty ′ (t) = 2. x ′ (t) = 2ty ′ (t) = 2.
Затем подставьте их в уравнение:
dydx = dy / dtdx / dtdydx = 22tdydx = 1t.dydx = dy / dtdx / dtdydx = 22tdydx = 1t.
Эта производная не определена при t = 0. t = 0. Вычисление x (0) x (0) и y (0) y (0) дает x (0) = (0) 2−3 = −3x (0) = (0) 2−3 = −3 и y (0 ) = 2 (0) −1 = −1, y (0) = 2 (0) −1 = −1, что соответствует точке (−3, −1) (- 3, −1) на графике. График этой кривой представляет собой параболу, раскрывающуюся вправо, а точка (−3, −1) (- 3, −1) является ее вершиной, как показано.Рис. 7.17. График параболы, описываемый параметрическими уравнениями в части а.
- Чтобы применить уравнение 7.1, сначала вычислите x ′ (t) x ′ (t) и y ′ (t): y ′ (t):
x ′ (t) = 2y ′ (t) = 3t2−3.x ′ (t) = 2y ′ (t) = 3t2−3.
Затем подставьте их в уравнение:
dydx = dy / dtdx / dtdydx = 3t2-32.dydx = dy / dtdx / dtdydx = 3t2-32.
Эта производная равна нулю при t = ± 1. t = ± 1. При t = −1t = −1 имеем
x (−1) = 2 (−1) + 1 = −1andy (−1) = (- 1) 3−3 (−1) + 4 = −1 + 3 + 4 = 6, x (−1) = 2 (−1) + 1 = −1andy (−1) = (- 1) 3−3 (−1) + 4 = −1 + 3 + 4 = 6,
что соответствует точке (−1,6) (- 1,6) на графике. При t = 1t = 1 имеем
x (1) = 2 (1) + 1 = 3andy (1) = (1) 3−3 (1) + 4 = 1−3 + 4 = 2, x (1) = 2 (1) + 1 = 3andy (1) = (1) 3−3 (1) + 4 = 1−3 + 4 = 2,
что соответствует точке (3,2) (3,2) на графике.Точка (3,2) (3,2) является относительным минимумом, а точка (−1,6) (- 1,6) является относительным максимумом, как показано на следующем графике.Рисунок 7.18 График кривой, описываемой параметрическими уравнениями в части b.
- Чтобы применить уравнение 7.1, сначала вычислите x ′ (t) x ′ (t) и y ′ (t): y ′ (t):
x ′ (t) = — 5sinty ′ (t) = 5cost.x ′ (t) = — 5sinty ′ (t) = 5cost.
Затем подставьте их в уравнение:
dydx = dy / dtdx / dtdydx = 5cost − 5sintdydx = −cott.dydx = dy / dtdx / dtdydx = 5cost − 5sintdydx = −cott.
Эта производная равна нулю, когда cost = 0cost = 0, и не определена, когда sint = 0. sint = 0. Это дает t = 0, π2, π, 3π2 и 2πt = 0, π2, π, 3π2 и 2π в качестве критических точек для t. Подставляя каждое из них в x (t) x (t) и y (t), y (t), получаемtt х (т) х (т) г (т) г (т) 0 5 0 π2π2 0 5 ππ −5 0 3π23π2 0 −5 2π2π 5 0 Эти точки соответствуют сторонам, верху и низу круга, представленного параметрическими уравнениями (рисунок 7.19). На левом и правом краях круга производная не определена, а сверху и снизу производная равна нулю.
Рисунок 7.19 График кривой, описываемой параметрическими уравнениями в части c.
В следующем примере мы используем эту теорему, чтобы найти центр масс пластинки. 4_0 \\ [4pt] & = \ dfrac {2} {3} [8−0] \\ [4pt] & = \ dfrac {16} {3}.4_0 \\ [4pt] & = \ dfrac {2} {5} [32−0] \\ [4pt] & = \ dfrac {64} {5}. \ end {align *} \]
Таким образом, мы имеем (Equation \ ref {eq4d}):
\ [\ begin {align *} \ bar {x} & = \ dfrac {M_y} {m} \\ [4pt] & = \ dfrac {64/5} {16/3} \\ [4pt] & = \ dfrac {64} {5} ⋅ \ dfrac {3} {16} \\ [4pt] & = \ dfrac {12} {5} \ end {align *} \]
и (Уравнение \ ref {eq4e}):
\ [\ begin {align *} \ bar {y} & = \ dfrac {M_x} {y} \\ [4pt] & = \ dfrac {4} {16/3} \\ [4pt] & = 4⋅ \ dfrac {3} {16} \\ [4pt] & = \ dfrac {3} {4}.2 \) и ниже по оси x на интервале \ ([0,2]. \) Найдите центр тяжести области.
Мы можем адаптировать этот подход для поиска центроидов более сложных регионов. 2 \), а снизу графиком функции \ (g (x) = 3−2x .\) Найдите центр тяжести области.
Принцип симметрии
Мы сформулировали принцип симметрии ранее, когда смотрели на центр тяжести прямоугольника. Принцип симметрии может быть большим подспорьем при нахождении центроидов симметричных областей.2 \) и ниже по оси абсцисс. Найдите центр тяжести области.
Решение
Область изображена на следующем рисунке
Рисунок \ (\ PageIndex {10} \): мы можем использовать принцип симметрии, чтобы найти центроид симметричной области.
Область симметрична относительно оси y . Следовательно, координата x центроида равна нулю. Нам нужно только вычислить \ (\ bar {y} \). Еще раз, для удобства, положим \ (ρ = 1 \). 2 _ {- 2} \\ [4pt] & = \ dfrac {32} {3}.2 \) и ниже по оси \ (x \). Найдите центр тяжести области.
Набережная Гранд-Каньона
Skywalk Гранд-Каньона открылся для публики 28 марта 2007 года. Это чудо инженерной мысли представляет собой смотровую площадку в форме подковы, подвешенную на высоте 4000 футов над рекой Колорадо на западном краю Гранд-Каньона.Его кристально чистый стеклянный пол позволяет любоваться потрясающим видом на каньон внизу (см. Следующий рисунок).
Рисунок \ (\ PageIndex {11} \): Skywalk Гранд-Каньон предлагает великолепные виды на каньон. (кредит: 10da_ralta, Wikimedia Commons)
Skywalk представляет собой консольную конструкцию, что означает, что смотровая площадка простирается по краю каньона без каких-либо видимых средств поддержки под ней. Несмотря на отсутствие видимых опорных стоек или распорок, консольные конструкции спроектированы так, чтобы быть очень устойчивыми, и Skywalk не является исключением.Смотровая площадка прочно прикреплена к опорным столбам, которые уходят в скалу на 46 футов. Конструкция была построена так, чтобы выдерживать ветер со скоростью 100 миль в час и землетрясение силой 8,0 баллов в пределах 50 миль, и способна выдержать более 70000000 фунтов
Одним из факторов, влияющих на устойчивость Skywalk, является центр тяжести конструкции. Мы собираемся вычислить центр тяжести Skywalk и исследовать, как центр тяжести изменяется, когда туристы выходят на смотровую площадку.
Смотровая площадка U-образная. Ноги U имеют ширину 10 футов и начинаются на суше, под центром посетителей, в 48 футах от края каньона. Платформа простирается на 70 футов над краем каньона.
Чтобы вычислить центр масс конструкции, мы рассматриваем ее как пластину и используем двумерную область в плоскости xy для представления платформы. Мы начинаем с разделения региона на три подобласти, чтобы мы могли рассматривать каждую подобласть отдельно. Первая область, обозначенная \ (R_1 \), состоит из изогнутой части буквы U.Мы моделируем \ (R_1 \) как полукруглое кольцо с внутренним радиусом 25 футов и внешним радиусом 35 футов с центром в начале координат (рисунок \ (\ PageIndex {12} \)).
Рисунок \ (\ PageIndex {12} \): мы моделируем Skywalk с тремя подобластями.
Опоры платформы, простирающиеся на 35 футов между \ (R_1 \) и стеной каньона, составляют вторую подобласть, \ (R_2 \). Наконец, концы ног, которые простираются на 48 футов ниже центра для посетителей, составляют третью подобласть, \ (R_3 \). Предположим, что плотность пластинки постоянна, и предположим, что общий вес платформы составляет 1 200 000 фунтов (не включая вес центра для посетителей; мы рассмотрим это позже).2 \).
6.1 Угол поворота и угловая скорость
Угловая скорость
Насколько быстро вращается объект? Мы можем ответить на этот вопрос, используя понятие угловой скорости.Рассмотрим сначала угловую скорость (ω) (ω) — это скорость, с которой изменяется угол поворота. В форме уравнения угловая скорость равна
.
6.2 ω = ΔθΔt, ω = ΔθΔt,, что означает, что угловое вращение (Δθ) (Δθ) происходит за время ΔtΔt. Если объект поворачивается на больший угол поворота в данный момент времени, он имеет большую угловую скорость. Единицы измерения угловой скорости — радианы в секунду (рад / с).
Теперь давайте рассмотрим направление угловой скорости, что означает, что теперь мы должны называть ее угловой скоростью.Направление угловой скорости — вдоль оси вращения. Для объекта, вращающегося по часовой стрелке, угловая скорость указывает от вас вдоль оси вращения. Для объекта, вращающегося против часовой стрелки, угловая скорость указывает на вас вдоль оси вращения.
Угловая скорость (ω) — это угловая версия линейной скорости v . Тангенциальная скорость — это мгновенная линейная скорость объекта во вращательном движении . Чтобы получить точное соотношение между угловой скоростью и тангенциальной скоростью, снова рассмотрим яму на вращающемся компакт-диске.Эта яма проходит по длине дуги (Δs) (Δs) за короткий промежуток времени (Δt) (Δt), поэтому его тангенциальная скорость равна
Из определения угла поворота, Δθ = ΔsrΔθ = Δsr, мы видим, что Δs = rΔθΔs = rΔθ. Подставляя это в выражение для v , получаем
v = rΔθΔt = rω. v = rΔθΔt = rω.
Уравнение v = rωv = rω говорит, что тангенциальная скорость v пропорциональна расстоянию r от центра вращения. Следовательно, тангенциальная скорость больше для точки на внешнем крае компакт-диска (с большим r ), чем для точки ближе к центру компакт-диска (с меньшим r ).Это имеет смысл, потому что точка, находящаяся дальше от центра, должна покрывать большую длину дуги за то же время, что и точка ближе к центру. Обратите внимание, что обе точки по-прежнему будут иметь одинаковую угловую скорость, независимо от их расстояния от центра вращения. См. Рисунок 6.4.
Рисунок 6.4 Точки 1 и 2 вращаются на один и тот же угол (ΔθΔθ), но точка 2 перемещается на большую длину дуги (Δs2Δs2), поскольку она дальше от центра вращения.
Теперь рассмотрим другой пример: шина движущегося автомобиля (см. Рисунок 6.5). Чем быстрее вращается шина, тем быстрее движется автомобиль — большое ωω означает большое v , потому что v = rωv = rω. Точно так же шина большего радиуса, вращающаяся с той же угловой скоростью ωω, будет создавать для автомобиля большую линейную (тангенциальную) скорость v, . Это связано с тем, что больший радиус означает, что большая длина дуги должна касаться дороги, поэтому автомобиль должен двигаться дальше за то же время.
Рисунок 6.5 Автомобиль, движущийся со скоростью v, вправо, имеет шину, вращающуюся с угловой скоростью ωω.Скорость протектора шины относительно оси составляет v , такая же, как если бы автомобиль был поднят домкратом, а колеса вращались, не касаясь дороги. Непосредственно под осью, где шина касается дороги, протектор шины движется назад по отношению к оси с тангенциальной скоростью v = rωv = rω, где r — радиус шины. Поскольку дорога неподвижна относительно этой точки шины, автомобиль должен двигаться вперед с линейной скоростью v . Большая угловая скорость шины означает большую линейную скорость автомобиля.
Однако есть случаи, когда линейная скорость и тангенциальная скорость не эквивалентны, например, когда автомобиль вращает свои колеса по льду. В этом случае линейная скорость будет меньше тангенциальной скорости. Из-за отсутствия трения под шинами автомобиля на льду длина дуги, по которой движутся протекторы шин, больше, чем линейное расстояние, по которому движется автомобиль. Это похоже на бег на беговой дорожке или на велотренажере; вы буквально никуда не денетесь.
Советы для успеха
Угловая скорость ω и тангенциальная скорость v являются векторами, поэтому мы должны включить величину и направление.Направление угловой скорости — вдоль оси вращения и указывает от вас для объекта, вращающегося по часовой стрелке, и к вам для объекта, вращающегося против часовой стрелки. В математике это описывается правилом правой руки. Тангенциальная скорость обычно описывается как вверх, вниз, влево, вправо, север, юг, восток или запад, как показано на рисунке 6.6.
Рис. 6.6. Поскольку муха на краю старинной виниловой пластинки движется по кругу, ее мгновенная скорость всегда направлена по касательной к кругу.Направление угловой скорости в данном случае указано на странице.
Watch Physics
Взаимосвязь между угловой скоростью и скоростью
В этом видео рассматриваются определение и единицы угловой скорости и их связь с линейной скоростью. Здесь также показано, как преобразовать число оборотов в радианы.
Проверка захвата
Для объекта, движущегося по круговой траектории с постоянной скоростью, изменится ли линейная скорость объекта при увеличении радиуса пути?
Круги, катящиеся по кругам | plus.maths.org
Сколько оборотов сделает меньшая монета, катаясь вокруг большей?
Представьте себе круг с радиусом 1 см, полностью катящийся по окружности с радиусом 4 см.Сколько оборотов сделал меньший круг?
Длина окружности радиуса равна, поэтому длина окружности радиуса будет равна. Поскольку
я решил, что ответ должен быть четыре оборота. Представьте себе мое удивление, когда я увидел, что ответ был пять!
Я прочитал объяснение, почему это действительно правильный ответ, и хотя рассуждения казались разумными, потребовалось некоторое время, прежде чем я смог по-настоящему убедить себя в том, что мое решение было ошибочным.Это интересная проблема, поэтому я представил ее нескольким людям, большинство из которых сразу же ответили «четыре», как и я, и, как и я, их было трудно убедить в обратном; только очень немногие могли интуитивно увидеть «пять» как правильный ответ.
Вот лучший способ подумать об этой проблеме: вместо того, чтобы катиться по большему кругу, начните с представления меньшего круга как катящегося по линии той же длины, что и окружность большего круга. В этом случае легко представить себе линию как имеющую длину единицы, и поэтому меньший круг явно должен был вращаться.Затем представьте, что круг скользит по линии, а не катится, так что точка на монете, в которой он касается линии, остается прежней. Теперь рассмотрим разницу между скольжением по прямой и по окружности; Если вы двигаете единицы по прямой, вы прибываете в пункт назначения так же, как и начали, без каких-либо изменений ориентации. Но если вы сделаете то же самое по окружности круга, вы совершите полный оборот, когда вернетесь в исходную точку.Таким образом, когда катит по одной и той же окружности, вы сделаете четыре вращающихся оборота плюс один скользящий оборот, всего пять!
Другими словами: когда маленький круг катится по окружности большего круга, одновременно происходят два вида движения: вращение и вращение. Четыре движения, которые мы изначально рассматриваем, — это четыре революции, возможно, потому, что они легко заметны. С другой стороны, вращение понять сложнее.
Трудно решить эту проблему, просто подумав о ней, поэтому важно проверить ситуацию экспериментально. Например, вы должны попробовать смоделировать эту проблему с помощью двух монет; если проблема соответствует предсказаниям большинства людей, то при использовании двух монет одинакового размера движущаяся будет вращаться раз, но, как вы увидите, это происходит дважды. Например, вы можете предсказать, что перекатывание от верха фиксированной монеты к ее низу приведет к тому, что катящаяся монета будет перевернута вверх дном, но на самом деле к этому моменту она неожиданно совершит полный оборот.Я очень рекомендую попробовать это самостоятельно.
Если вам трудно понять, как все работает с кругом, вы также можете представить, что произойдет с квадратом. Когда круг, катящийся по внешней периферии квадрата, встречает первый угол, ему придется повернуться на «лишние» 90 °, чтобы продолжить движение по следующей стороне. Это произойдет снова на каждом углу, и, поскольку 90 ° x 4 = 360 °, это составляет дополнительный полный оборот.
Каждое из приведенных выше объяснений описывает движение круга как
разложение на вращение и вращение, но на самом деле такого разложения не происходит.Подобно тому, как сердце и легкие человека работают одновременно, вращение и вращение происходят вместе. Разделение вращения и вращения полезно для понимания, но это не дает фундаментального решения. Некоторые говорят, что структура нашего мозга не позволяет выполнять многозадачность, но научиться одновременно понимать такие явления было бы очень ценно.Аналогичная проблема появилась в Ага! Gotcha: Paradoxes to Puzzle and Delight Мартина Гарднера, а также в Scientific American в 1868 году.Если вы можете придумать альтернативное доказательство или объяснение этой проблемы, оставьте комментарий или напишите нам!
Об авторе
Ютака Нишияма — профессор Осакского экономического университета, Япония. После изучения математики в Университете Киото он 14 лет проработал в IBM Japan. Он интересуется математикой, которая встречается в повседневной жизни, и написал десять книг по этому предмету. Самый последний — Таинственное число 6174: одна из 30 математических тем повседневной жизни , опубликованный Гендаем Сугакушей в июле 2013 года (ISBN978-4-7687-6174-8).Вы можете посетить его веб-сайт здесь.
7.2 Расчет параметрических кривых — том 2
Цели обучения
Теперь, когда мы ввели концепцию параметризованной кривой, наш следующий шаг — научиться работать с этой концепцией в контексте исчисления.Например, если мы знаем параметризацию данной кривой, можно ли вычислить наклон касательной к кривой? Как насчет длины дуги кривой? Или площадь под кривой?
Другой сценарий. Предположим, мы хотим изобразить положение бейсбольного мяча после того, как мяч покидает руку питчера. Если положение бейсбольного мяча представлено плоской кривой (x (t), y (t)), (x (t), y (t)), тогда мы сможем использовать математические вычисления для определения скорости движения мяча. мяч в любой момент времени.Кроме того, мы должны иметь возможность вычислить, как далеко прошел этот шар, как функцию времени.
Производные параметрических уравнений
Мы начинаем с вопроса, как вычислить наклон прямой, касательной к параметрической кривой в точке. Рассмотрим плоскую кривую, заданную параметрическими уравнениями
x (t) = 2t + 3, y (t) = 3t − 4, −2≤t≤3.x (t) = 2t + 3, y (t) = 3t − 4, −2≤t≤3.
График этой кривой представлен на Рисунке 7.16. Это отрезок, начинающийся в (−1, −10) (- 1, −10) и заканчивающийся в (9,5).(9,5).
Рисунок 7.16 График отрезка прямой, описываемый заданными параметрическими уравнениями.
Мы можем исключить параметр, решив сначала уравнение x (t) = 2t + 3x (t) = 2t + 3 для t :
x (t) = 2t + 3x − 3 = 2tt = x − 32. x (t) = 2t + 3x − 3 = 2tt = x − 32.
Подставляя это в y (t), y (t), получаем
y (t) = 3t − 4y = 3 (x − 32) −4y = 3×2−92−4y = 3×2−172.y (t) = 3t − 4y = 3 (x − 32) −4y = 3×2−92− 4у = 3х2−172.
Наклон этой прямой равен dydx = 32.dydx = 32. Затем мы вычисляем x ′ (t) x ′ (t) и y ′ (t).y ′ (t). Это дает x ′ (t) = 2x ′ (t) = 2 и y ′ (t) = 3. y ′ (t) = 3. Обратите внимание, что dydx = dy / dtdx / dt = 32.dydx = dy / dtdx / dt = 32. Это не совпадение, как указано в следующей теореме.
Теорема 7.1
Производная параметрических уравнений
Рассмотрим плоскую кривую, заданную параметрическими уравнениями x = x (t) x = x (t) и y = y (t) .y = y (t). Предположим, что существуют x ′ (t) x ′ (t) и y ′ (t) y ′ (t), и предположим, что x ′ (t) ≠ 0.x ′ (t) ≠ 0. Тогда производная dydxdydx равна
dydx = dy / dtdx / dt = y ′ (t) x ′ (t).dydx = dy / dtdx / dt = y ′ (t) x ′ (t).
(7,1)
Проба
Эту теорему можно доказать с помощью цепного правила. В частности, предположим, что параметр t может быть исключен, давая дифференцируемую функцию y = F (x) .y = F (x). Тогда y (t) = F (x (t)). Y (t) = F (x (t)). Дифференцируя обе части этого уравнения с помощью правила цепочки, получаем
y ′ (t) = F ′ (x (t)) x ′ (t), y ′ (t) = F ′ (x (t)) x ′ (t),
т.
F ′ (x (t)) = y ′ (t) x ′ (t). F ′ (x (t)) = y ′ (t) x ′ (t).
Но F ′ (x (t)) = dydx, F ′ (x (t)) = dydx, что доказывает теорему.
□
Уравнение 7.1 можно использовать для вычисления производных плоских кривых, а также критических точек. Напомним, что критической точкой дифференцируемой функции y = f (x) y = f (x) является любая точка x = x0x = x0 такая, что либо f ′ (x0) = 0f ′ (x0) = 0, либо f ′ (x0 ) f ′ (x0) не существует. Уравнение 7.1 дает формулу для наклона касательной к кривой, заданной параметрически, независимо от того, может ли кривая быть описана функцией y = f (x) y = f (x) или нет.
Пример 7.4
Нахождение производной параметрической кривой
Вычислите производную dydxdydx для каждой из следующих параметрически определенных плоских кривых и найдите любые критические точки на соответствующих графиках.
Решение
КПП 7,4
Вычислить производную dy / dxdy / dx для плоской кривой, определяемой уравнениями
x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤3x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤3
и найдите критические точки на его графике.
Пример 7.5
Поиск касательной
Найдите уравнение касательной к кривой, определяемой уравнениями
x (t) = t2−3, y (t) = 2t − 1, −3≤t≤4whent = 2. x (t) = t2−3, y (t) = 2t − 1, −3≤t≤ 4whent = 2.
Решение
Сначала найдите наклон касательной с помощью уравнения 7.1, что означает вычисление x ′ (t) x ′ (t) и y ′ (t): y ′ (t):
x ′ (t) = 2ty ′ (t) = 2. x ′ (t) = 2ty ′ (t) = 2.
Затем подставьте их в уравнение:
dydx = dy / dtdx / dtdydx = 22tdydx = 1t.dydx = dy / dtdx / dtdydx = 22tdydx = 1t.
Когда t = 2, t = 2, dydx = 12, dydx = 12, значит, это наклон касательной. Вычисление x (2) x (2) и y (2) y (2) дает
x (2) = (2) 2−3 = 1andy (2) = 2 (2) −1 = 3, x (2) = (2) 2−3 = 1andy (2) = 2 (2) −1 = 3,
, что соответствует точке (1,3) (1,3) на графике (рисунок 7.20). Теперь используйте форму точки наклона уравнения прямой, чтобы найти уравнение касательной:
y − y0 = m (x − x0) y − 3 = 12 (x − 1) y − 3 = 12x − 12y = 12x + 52. y − y0 = m (x − x0) y − 3 = 12 (x− 1) y − 3 = 12x − 12y = 12x + 52.
Рис. 7.20. Касательная к параболе, описываемой данными параметрическими уравнениями при t = 2.т = 2.
КПП 7.5
Найдите уравнение касательной к кривой, определяемой уравнениями
x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤10whent = 5. x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤ 10whent = 5.
Производные инструменты второго порядка
Наша следующая цель — увидеть, как взять вторую производную функции, определенной параметрически. Вторая производная функции y = f (x) y = f (x) определяется как производная от первой производной; то есть
d2ydx2 = ddx [dydx] .d2ydx2 = ddx [dydx].
Поскольку dydx = dy / dtdx / dt, dydx = dy / dtdx / dt, мы можем заменить yy в обеих частях этого уравнения на dydx.dydx. Это дает нам
d2ydx2 = ddx (dydx) = (d / dt) (dy / dx) dx / dt. d2ydx2 = ddx (dydx) = (d / dt) (dy / dx) dx / dt.
(7,2)
Если мы знаем dy / dxdy / dx как функцию от t, , то эту формулу легко применить.
Пример 7.6
Нахождение второй производной
Вычислите вторую производную d2y / dx2d2y / dx2 для плоской кривой, заданной параметрическими уравнениями x (t) = t2−3, y (t) = 2t − 1, −3≤t≤4.x (t) = t2−3, y (t) = 2t − 1, −3≤t≤4.
Решение
Из примера 7.4 мы знаем, что dydx = 22t = 1t.dydx = 22t = 1t. Используя уравнение 7.2, получаем
d2ydx2 = (d / dt) (dy / dx) dx / dt = (d / dt) (1 / t) 2t = −t − 22t = −12t3.d2ydx2 = (d / dt) (dy / dx) dx / dt = (d / dt) (1 / t) 2t = −t − 22t = −12t3.
КПП 7,6
Вычислить вторую производную d2y / dx2d2y / dx2 для плоской кривой, определяемой уравнениями
x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤3x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤3
и найдите критические точки на его графике.
Интегралы, содержащие параметрические уравнения
Теперь, когда мы увидели, как вычислить производную плоской кривой, следующий вопрос: как найти площадь под кривой, заданной параметрически? Напомним циклоиду, определяемую уравнениями x (t) = t − sint, y (t) = 1 − cost.x (t) = t − sint, y (t) = 1 − cost. Предположим, мы хотим найти площадь заштрихованной области на следующем графике.
Рисунок 7.21 График циклоиды с выделенной аркой над [0,2π] [0,2π].
Вывести формулу площади под кривой, определяемой функциями
x = x (t), y = y (t), a≤t≤b, x = x (t), y = y (t), a≤t≤b,
мы предполагаем, что x (t) x (t) дифференцируема, и начинаем с равного разбиения интервала a≤t≤b.а≤t≤b. Предположим, что t0 = a
Рис. 7.22. Аппроксимация площади под параметрически заданной кривой.
Мы используем прямоугольники для аппроксимации площади под кривой. Высота типичного прямоугольника в этой параметризации равна y (x (t – i)) y (x (t – i)) для некоторого значения t – it – i в подынтервале i , а ширину можно вычислить как x (ti) −x (ti − 1) .x (ti) −x (ti − 1). Таким образом, площадь прямоугольника – равна
.
Ai = y (x (t – i)) (x (ti) −x (ti − 1)).Ai = y (x (t – i)) (x (ti) −x (ti − 1)).Тогда сумма Римана для площади равна
.
An = ∑i = 1ny (x (t – i)) (x (ti) −x (ti − 1)). An = ∑i = 1ny (x (t – i)) (x (ti) −x ( ti − 1)).Умножение и деление каждой площади на ti − ti − 1ti − ti − 1 дает
An = ∑i = 1ny (x (t – i)) (x (ti) −x (ti − 1) ti − ti − 1) (ti − ti − 1) = ∑i = 1ny (x (t – i )) (x (ti) −x (ti − 1) Δt) Δt.An = ∑i = 1ny (x (t – i)) (x (ti) −x (ti − 1) ti − ti − 1) (ti − ti − 1) = ∑i = 1ny (x (t – i)) (x (ti) −x (ti − 1) Δt) Δt.
Если принять предел, когда nn стремится к бесконечности, получаем
A = limn → ∞An = ∫aby (t) x ′ (t) dt. A = limn → ∞An = ∫aby (t) x ′ (t) dt.
Это приводит к следующей теореме.
Теорема 7.2
Площадь под параметрической кривой
Рассмотрим несамопересекающуюся плоскую кривую, определяемую параметрическими уравнениями
x = x (t), y = y (t), a≤t≤bx = x (t), y = y (t), a≤t≤b
и предположим, что x (t) x (t) дифференцируема. Площадь под этой кривой равна
.
A = aby (t) x ′ (t) dt. A = aby (t) x ′ (t) dt.(7,3)
Пример 7.7
Определение площади под параметрической кривой
Найдите площадь под кривой циклоиды, определяемой уравнениями
x (t) = t − sint, y (t) = 1 − стоимость, 0≤t≤2π.x (t) = t − sint, y (t) = 1 − стоимость, 0≤t≤2π.
Решение
Используя уравнение 7.3, получаем
A = ∫aby (t) x ′ (t) dt = ∫02π (1 − cost) (1 − cost) dt = ∫02π (1-2cost + cos2t) dt = ∫02π (1-2cost + 1 + cos2t2) dt = ∫02π (32−2cost + cos2t2) dt = 3t2−2sint + sin2t4 | 02π = 3π.A = ∫aby (t) x ′ (t) dt = ∫02π (1 − cost) (1 − cost) dt = ∫02π (1−2cost + cos2t) dt = ∫02π (1−2cost + 1 + cos2t2) dt = ∫02π (32−2cost + cos2t2) dt = 3t2−2sint + sin2t4 | 02π = 3π.
КПП 7,7
Найдите площадь под кривой гипоциклоиды, определяемой уравнениями
x (t) = 3cost + cos3t, y (t) = 3sint − sin3t, 0≤t≤π.x (t) = 3cost + cos3t, y (t) = 3sint − sin3t, 0≤t≤π.
Длина дуги параметрической кривой
В дополнение к нахождению площади под параметрической кривой нам иногда необходимо найти длину дуги параметрической кривой. В случае линейного сегмента длина дуги равна расстоянию между конечными точками. Если частица перемещается из точки A в точку B по кривой, то расстояние, которое проходит частица, является длиной дуги. Чтобы разработать формулу для длины дуги, мы начнем с аппроксимации отрезками линии, как показано на следующем графике.
Рисунок 7.23 Аппроксимация кривой отрезками прямых.
Для плоской кривой, определяемой функциями x = x (t), y = y (t), a≤t≤b, x = x (t), y = y (t), a≤t≤b, мы начните с разделения интервала [a, b] [a, b] на n равных подинтервалов: t0 = a
d1 = (x (t1) −x (t0)) 2+ (y (t1) −y (t0)) 2d2 = (x (t2) −x (t1)) 2+ (y (t2) −y (t1 )) 2etc.d1 = (x (t1) −x (t0)) 2+ (y (t1) −y (t0)) 2d2 = (x (t2) −x (t1)) 2+ (y (t2) −y (t1 )) 2etc.
Затем сложите их. Пусть s обозначает точную длину дуги, а snsn обозначает аппроксимацию n отрезков линии:
s≈∑k = 1nsk = ∑k = 1n (x (tk) −x (tk − 1)) 2+ (y (tk) −y (tk − 1)) 2. k) Δty (tk) −y (tk − 1) = y ′ (t ˜k) (tk − tk − 1) = y ′ (t˜k) Δt.k и t˜kt˜k содержатся в одном и том же постоянно сокращающемся интервале шириной Δt, Δt, поэтому они должны сходиться к одному и тому же значению.
Мы можем резюмировать этот метод в следующей теореме.
Теорема 7.3
Длина дуги параметрической кривой
Рассмотрим плоскую кривую, определяемую параметрическими уравнениями
x = x (t), y = y (t), t1≤t≤t2x = x (t), y = y (t), t1≤t≤t2
и предположим, что x (t) x (t) и y (t) y (t) — дифференцируемые функции от t. Тогда длина дуги этой кривой равна
.
s = ∫t1t2 (dxdt) 2+ (dydt) 2dt.s = ∫t1t2 (dxdt) 2+ (dydt) 2dt.(7,5)
На этом этапе боковой вывод приводит к предыдущей формуле для длины дуги. В частности, предположим, что параметр можно исключить, что приведет к функции y = F (x) .y = F (x). Тогда y (t) = F (x (t)) y (t) = F (x (t)) и цепное правило дает y ′ (t) = F ′ (x (t)) x ′ (t). y ′ (t) = F ′ (x (t)) x ′ (t). Подставляя это в уравнение 7.5, получаем
s = ∫t1t2 (dxdt) 2+ (dydt) 2dt = ∫t1t2 (dxdt) 2+ (F ′ (x) dxdt) 2dt = ∫t1t2 (dxdt) 2 (1+ (F ′ (x)) 2) dt = ∫t1t2x ′ (t) 1+ (dydx) 2dt.s = ∫t1t2 (dxdt) 2+ (dydt) 2dt = ∫t1t2 (dxdt) 2+ (F ′ (x) dxdt) 2dt = ∫t1t2 (dxdt) 2 (1+ (F ′ (x)) 2) dt = ∫t1t2x ′ (t) 1+ (dydx) 2dt.
Здесь мы предположили, что x ′ (t)> 0, x ′ (t)> 0, что является разумным предположением. Цепное правило дает dx = x ′ (t) dt, dx = x ′ (t) dt, и, полагая a = x (t1) a = x (t1) и b = x (t2) b = x (t2), мы получить формулу
s = ab1 + (dydx) 2dx, s = ∫ab1 + (dydx) 2dx,
, который представляет собой формулу для длины дуги, полученную во Введении в приложения интеграции.
Пример 7.8
Определение длины дуги параметрической кривой
Найдите длину дуги полукруга, определяемую уравнениями
x (t) = 3cost, y (t) = 3sint, 0≤t≤π.x (t) = 3cost, y (t) = 3sint, 0≤t≤π.
Решение
Значения от t = 0t = 0 до t = πt = π очерчивают красную кривую на рисунке 7.23. Чтобы определить его длину, используйте уравнение 7.5:
.
s = ∫t1t2 (dxdt) 2+ (dydt) 2dt = ∫0π (−3sint) 2+ (3cost) 2dt = ∫0π9sin2t + 9cos2tdt = ∫0π9 (sin2t + cos2t) dt = ∫0π3dt = 3t | 0π = 3π. s = ∫t1t2 (dxdt) 2+ (dydt) 2dt = ∫0π (−3sint) 2+ (3cost) 2dt = ∫0π9sin2t + 9cos2tdt = ∫0π9 (sin2t + cos2t) dt = ∫0π3dt = 3t | 0π = 3π.Обратите внимание, что формула для длины дуги полукруга равна πrπr, а радиус этой окружности равен 3.Это отличный пример использования исчисления для вывода известной формулы геометрической величины.
Рис. 7.24. Длина дуги полукруга равна его радиусу, умноженному на π.π.
КПП 7,8
Найдите длину дуги кривой, определяемой уравнениями
x (t) = 3t2, y (t) = 2t3,1≤t≤3.x (t) = 3t2, y (t) = 2t3,1≤t≤3.
Теперь вернемся к задаче, поставленной в начале раздела, о том, что бейсбольный мяч выходит из руки питчера. Игнорируя эффект сопротивления воздуха (если это не криволинейный шар!), Мяч движется по параболической траектории.Предполагая, что рука питчера находится в начале координат, а мяч движется слева направо в направлении положительной оси x , параметрические уравнения для этой кривой можно записать как
x (t) = 140t, y (t) = — 16t2 + 2tx (t) = 140t, y (t) = — 16t2 + 2t
, где t представляет время. Сначала мы вычисляем расстояние, которое проходит мяч, как функцию времени. Это расстояние представлено длиной дуги. Мы можем немного изменить формулу длины дуги. Сначала перепишите функции x (t) x (t) и y (t) y (t), используя v в качестве независимой переменной, чтобы исключить путаницу с параметром t :
.
х (v) = 140v, y (v) = — 16v2 + 2v.х (v) = 140v, y (v) = — 16v2 + 2v.Затем запишем формулу длины дуги следующим образом:
s (t) = ∫0t (dxdv) 2+ (dydv) 2dv = ∫0t1402 + (- 32v + 2) 2dv.s (t) = ∫0t (dxdv) 2+ (dydv) 2dv = ∫0t1402 + (- 32v + 2) 2дв.
Переменная v действует как фиктивная переменная, которая исчезает после интегрирования, оставляя длину дуги как функцию времени t. Чтобы интегрировать это выражение, мы можем использовать формулу из Приложения A,
A2 + u2du = u2a2 + u2 + a22ln | u + a2 + u2 | + C. a2 + u2du = u2a2 + u2 + a22ln | u + a2 + u2 | + C.
Положим a = 140a = 140 и u = −32v + 2.u = −32v + 2. Это дает du = −32dv, du = −32dv, поэтому dv = −132du.dv = −132du. Следовательно,
∫1402 + (- 32v + 2) 2dv = −132∫a2 + u2du = −132 [(- 32v + 2) 21402 + (- 32v + 2) 2 + 14022ln | (−32v + 2) +1402 + (- 32v + 2) 2 |] + C∫1402 + (- 32v + 2) 2dv = −132∫a2 + u2du = −132 [(- 32v + 2) 21402 + (- 32v + 2) 2 + 14022ln | (- 32v + 2) +1402 + (- 32v + 2) 2 |] + C
и
s (t) = — 132 [(- 32t + 2) 21402 + (- 32t + 2) 2 + 14022ln | (−32t + 2) +1402 + (- 32t + 2) 2 |] +132 [1402 + 22 + 14022ln | 2 + 1402 + 22 |] = (t2−132) 1024t2−128t + 19604−12254ln | (−32t + 2) + 1024t2−128t + 19604 | + 1960432 + 12254ln (2 + 19604) .s (t ) = — 132 [(- 32t + 2) 21402 + (- 32t + 2) 2 + 14022ln | (−32t + 2) +1402 + (- 32t + 2) 2 |] +132 [1402 + 22 + 14022ln | 2 + 1402 + 22 |] = (t2−132) 1024t2−128t + 19604−12254ln | (−32t + 2) + 1024t2−128t + 19604 | + 1960432 + 12254ln (2 + 19604).
Эта функция представляет расстояние, пройденное мячом, как функцию времени. Для расчета скорости возьмем производную этой функции по т. Хотя это может показаться сложной задачей, можно получить ответ непосредственно из Фундаментальной теоремы исчисления:
ddx∫axf (u) du = f (x). ddx∫axf (u) du = f (x).
Следовательно,
s ′ (t) = ddt [s (t)] = ddt [∫0t1402 + (- 32v + 2) 2dv] = 1402 + (- 32t + 2) 2 = 1024t2−128t + 19604 = 2256t2−32t + 4901.s ′ (T) = ddt [s (t)] = ddt [∫0t1402 + (- 32v + 2) 2dv] = 1402 + (- 32t + 2) 2 = 1024t2−128t + 19604 = 2256t2−32t + 4901.
Через треть секунды после того, как мяч покидает руку питчера, расстояние, которое он проходит, равно
.
s (13) = (1 / 32−132) 1024 (13) 2−128 (13) + 19604−12254ln | (−32 (13) +2) +1024 (13) 2−128 (13) +19604 | + 1960432 + 12254ln (2 + 19604) ≈46.69feet.s (13) = (1 / 32−132) 1024 (13) 2−128 (13) + 19604−12254ln | (−32 (13) +2) + 1024 (13) 2−128 (13) +19604 | + 1960432 + 12254ln (2 + 19604) ≈46.69 футов.Это значение составляет чуть более трех четвертей пути к исходной тарелке. Скорость мяча
s ′ (13) = 2256 (13) 2−16 (13) + 4901≈140,34 фут / с.s ′ (13) = 2256 (13) 2−16 (13) + 4901≈140.34 фута / с.
Эта скорость соответствует примерно 95 милям в час — фастбол высшей лиги.
Площадь поверхности, созданная параметрической кривой
Вспомните задачу о нахождении площади поверхности объема вращения. В разделах Длина кривой и Площадь поверхности мы вывели формулу для определения площади поверхности объема, созданного функцией y = f (x) y = f (x) от x = ax = a до x = b, x = b, вращается вокруг оси x — оси:
S = 2π∫abf (x) 1+ (f ′ (x)) 2dx. S = 2π∫abf (x) 1+ (f ′ (x)) 2dx.
Теперь рассмотрим объем вращения, создаваемый вращением параметрически определенной кривой x = x (t), y = y (t), a≤t≤bx = x (t), y = y (t), a≤t ≤b вокруг оси x , как показано на следующем рисунке.
Рис. 7.25 Поверхность вращения, образованная параметрически заданной кривой.
Аналогичная формула для параметрически определенной кривой:
S = 2π∫aby (t) (x ′ (t)) 2+ (y ′ (t)) 2dtS = 2π∫aby (t) (x ′ (t)) 2+ (y ′ (t)) 2dt
(7,6)
при условии, что y (t) y (t) не отрицательно на [a, b]. [A, b].
Пример 7.9
Поиск площади поверхности
Найдите площадь поверхности сферы радиусом r с центром в начале координат.
Решение
Начнем с кривой, определяемой уравнениями
x (t) = rcost, y (t) = rsint, 0≤t≤π.x (t) = rcost, y (t) = rsint, 0≤t≤π.
Это создает верхний полукруг радиусом r с центром в начале координат, как показано на следующем графике.
Рис. 7.26. Полукруг, образованный параметрическими уравнениями.
Когда эта кривая вращается вокруг оси x , она образует сферу радиусом r . Чтобы вычислить площадь поверхности сферы, мы используем уравнение 7.6:
S = 2π∫aby (t) (x ′ (t)) 2+ (y ′ (t)) 2dt = 2π∫0πrsint (−rsint) 2+ (rcost) 2dt = 2π∫0πrsintr2sin2t + r2cos2tdt = 2π∫0πrsintr2 ( sin2t + cos2t) dt = 2π∫0πr2sintdt = 2πr2 (−cost | 0π) = 2πr2 (−cosπ + cos0) = 4πr2.S = 2π∫aby (t) (x ′ (t)) 2+ (y ′ (t)) 2dt = 2π∫0πrsint (−rsint) 2+ (rcost) 2dt = 2π∫0πrsintr2sin2t + r2cos2tdt = 2π∫0πrsintr2 ( sin2t + cos2t) dt = 2π∫0πr2sintdt = 2πr2 (−cost | 0π) = 2πr2 (−cosπ + cos0) = 4πr2.
Фактически, это формула площади поверхности сферы.
КПП 7.9
Найдите площадь поверхности, образованную плоской кривой, определяемой уравнениями
x (t) = t3, y (t) = t2,0≤t≤1x (t) = t3, y (t) = t2,0≤t≤1
вращается вокруг оси x .
Раздел 7.2. Упражнения
В следующих упражнениях каждый набор параметрических уравнений представляет собой линию.Не удаляя параметр, найдите наклон каждой линии.
62.
x = 3 + t, y = 1 − tx = 3 + t, y = 1 − t
64.
x = 4−3t, y = −2 + 6tx = 4−3t, y = −2 + 6t
65.
x = −5t + 7, y = 3t − 1x = −5t + 7, y = 3t − 1
Для следующих упражнений определите наклон касательной, затем найдите уравнение касательной при заданном значении параметра.
66.
x = 3sint, y = 3cost, t = π4x = 3sint, y = 3cost, t = π4
67.
x = стоимость, y = 8sint, t = π2x = стоимость, y = 8sint, t = π2
68.
x = 2t, y = t3, t = −1x = 2t, y = t3, t = −1
69.
x = t + 1t, y = t − 1t, t = 1x = t + 1t, y = t − 1t, t = 1
Для следующих упражнений найдите все точки кривой с заданным наклоном.
71.
x = 4cost, y = 4sint, x = 4cost, y = 4sint, slope = 0,5
72.
x = 2cost, y = 8sint, slope = −1x = 2cost, y = 8sint, slope = −1
73.
x = t + 1t, y = t − 1t, наклон = 1x = t + 1t, y = t − 1t, наклон = 1
74.
x = 2 + t, y = 2−4t, наклон = 0x = 2 + t, y = 2−4t, наклон = 0
Для следующих упражнений запишите уравнение касательной в декартовых координатах для данного параметра t .
75.
x = et, y = 1 − lnt2, t = 1x = et, y = 1 − lnt2, t = 1
76.
x = tlnt, y = sin2t, t = π4x = tlnt, y = sin2t, t = π4
77.
x = et, y = (t − 1) 2, при (1,1) x = et, y = (t − 1) 2, при (1,1)
78.
Для x = sin (2t), y = 2sintx = sin (2t), y = 2sint, где 0≤t <2π.0≤t <2π. Найдите все значения t , при которых существует горизонтальная касательная.
79.
Для x = sin (2t), y = 2sintx = sin (2t), y = 2sint, где 0≤t <2π.0≤t <2π. Найдите все значения t , при которых существует вертикальная касательная.
80.
Найдите все точки на кривой x = 4sin (t), y = 4cos (t) x = 4sin (t), y = 4cos (t), которые имеют наклон 0,50,5
81.
Найдите dydxdydx для x = sin (t), y = cos (t) .x = sin (t), y = cos (t).
82.
Найдите уравнение касательной к x = sin (t), y = cos (t) x = sin (t), y = cos (t) при t = π4.t = π4.
83.
Для кривой x = 4t, y = 3t − 2, x = 4t, y = 3t − 2 найдите наклон и вогнутость кривой при t = 3.t = 3.
84.
Для параметрической кривой, уравнение которой имеет вид x = 4cosθ, y = 4sinθ, x = 4cosθ, y = 4sinθ, найдите наклон и вогнутость кривой при θ = π4.θ = π4.
85.
Найдите наклон и вогнутость кривой, уравнение которой: x = 2 + secθ, y = 1 + 2tanθx = 2 + secθ, y = 1 + 2tanθ при θ = π6.θ = π6.
86.
Найдите все точки на кривой x = t + 4, y = t3−3tx = t + 4, y = t3−3t, в которых есть вертикальные и горизонтальные касательные.
87.
Найдите все точки на кривой x = secθ, y = tanθx = secθ, y = tanθ, в которых существуют горизонтальные и вертикальные касательные.
Для следующих упражнений найдите d2y / dx2.d2y / dx2.
88.
x = t4−1, y = t − t2x = t4−1, y = t − t2
89.
x = sin (πt), y = cos (πt) x = sin (πt), y = cos (πt)
90.
x = e − t, y = te2tx = e − t, y = te2t
Для следующих упражнений найдите точки на кривой, в которых касательная линия является горизонтальной или вертикальной.
91.
x = t (t2−3), y = 3 (t2−3) x = t (t2−3), y = 3 (t2−3)
92.
x = 3t1 + t3, y = 3t21 + t3x = 3t1 + t3, y = 3t21 + t3
Для следующих упражнений найдите dy / dxdy / dx в значении параметра.
93.
x = стоимость, y = синт, t = 3π4x = стоимость, y = синт, t = 3π4
94.
x = t, y = 2t + 4, t = 9x = t, y = 2t + 4, t = 9
95.
x = 4cos (2πs), y = 3sin (2πs), s = −14x = 4cos (2πs), y = 3sin (2πs), s = −14
Для следующих упражнений найдите d2y / dx2d2y / dx2 в заданной точке, не удаляя параметр.
96.
x = 12t2, y = 13t3, t = 2x = 12t2, y = 13t3, t = 2
97.
x = t, y = 2t + 4, t = 1x = t, y = 2t + 4, t = 1
98.
Найдите t интервалов, на которых кривая x = 3t2, y = t3 − tx = 3t2, y = t3 − t вогнута вверх и вниз.
99.
Определите вогнутость кривой x = 2t + lnt, y = 2t − lnt.x = 2t + lnt, y = 2t − lnt.
100.
Нарисуйте и найдите площадь под одной аркой циклоиды x = r (θ − sinθ), y = r (1 − cosθ) .x = r (θ − sinθ), y = r (1 − cosθ).
101.
Найдите площадь, ограниченную кривой x = cost, y = et, 0≤t≤π2x = cost, y = et, 0≤t≤π2 и линиями y = 1y = 1 и x = 0.x = 0.
102.
Найдите площадь, заключенную в эллипс x = acosθ, y = bsinθ, 0≤θ <2π.x = acosθ, y = bsinθ, 0≤θ <2π.
103.
Найдите площадь области, ограниченной x = 2sin2θ, y = 2sin2θtanθ, x = 2sin2θ, y = 2sin2θtanθ, для 0≤θ≤π2.0≤θ≤π2.
Для следующих упражнений найдите площадь областей, ограниченных параметрическими кривыми и указанными значениями параметра.
104.
x = 2cotθ, y = 2sin2θ, 0≤θ≤πx = 2cotθ, y = 2sin2θ, 0≤θ≤π
105.
[T] x = 2acost − acos (2t), y = 2asint − asin (2t), 0≤t <2πx = 2acost − acos (2t), y = 2asint − asin (2t), 0≤t < 2π
106.
[T] x = asin (2t), y = bsin (t), 0≤t <2πx = asin (2t), y = bsin (t), 0≤t <2π («песочные часы»)
107.
[T] x = 2acost − asin (2t), y = bsint, 0≤t <2πx = 2acost − asin (2t), y = bsint, 0≤t <2π («слеза»)
Для следующих упражнений найдите длину дуги кривой на указанном интервале параметра.
108.
x = 4t + 3, y = 3t − 2,0≤t≤2x = 4t + 3, y = 3t − 2,0≤t≤2
109.
x = 13t3, y = 12t2,0≤t≤1x = 13t3, y = 12t2,0≤t≤1
110.
x = cos (2t), y = sin (2t), 0≤t≤π2x = cos (2t), y = sin (2t), 0≤t≤π2
111.
х = 1 + t2, y = (1 + t) 3,0≤t≤1x = 1 + t2, y = (1 + t) 3,0≤t≤1
112.
x = etcost, y = etsint, 0≤t≤π2x = etcost, y = etsint, 0≤t≤π2 (выразите ответ в виде десятичной дроби с округлением до трех знаков)
113.
x = acos3θ, y = asin3θx = acos3θ, y = asin3θ на интервале [0,2π) [0,2π) (гипоциклоида)
114.
Найдите длину одной дуги циклоиды x = 4 (t − sint), y = 4 (1 − cost) .x = 4 (t − sint), y = 4 (1 − cost).
115.
Найдите расстояние, пройденное частицей с положением (x, y) (x, y), поскольку t изменяется в заданном временном интервале: x = sin2t, y = cos2t, 0≤t≤3π.x = sin2t, y = cos2t, 0≤t≤3π.
116.
Найдите длину одной дуги циклоиды x = θ − sinθ, y = 1 − cosθ.x = θ − sinθ, y = 1 − cosθ.
117.
Покажите, что общая длина эллипса x = 4sinθ, y = 3cosθx = 4sinθ, y = 3cosθ равна L = 16∫0π / 21 − e2sin2θdθ, L = 16∫0π / 21 − e2sin2θdθ, где e = cae = ca и с = a2 − b2.с = a2 − b2.
118.
Найдите длину кривой x = et − t, y = 4et / 2, −8≤t≤3.x = et − t, y = 4et / 2, −8≤t≤3.
Для следующих упражнений найдите площадь поверхности, полученную вращением данной кривой вокруг оси x .
119.
x = t3, y = t2,0≤t≤1x = t3, y = t2,0≤t≤1
120.
x = acos3θ, y = asin3θ, 0≤θ≤π2x = acos3θ, y = asin3θ, 0≤θ≤π2
121.
[T] Используйте CAS, чтобы найти площадь поверхности, созданную вращением x = t + t3, y = t − 1t2,1≤t≤2x = t + t3, y = t − 1t2,1≤t ≤2 относительно оси x .(Ответ с точностью до трех знаков после запятой.)
122.
Найдите площадь поверхности, полученную вращением x = 3t2, y = 2t3,0≤t≤5x = 3t2, y = 2t3,0≤t≤5 вокруг оси y .