Регулятор оборотов коллекторного двигателя без потерь
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями.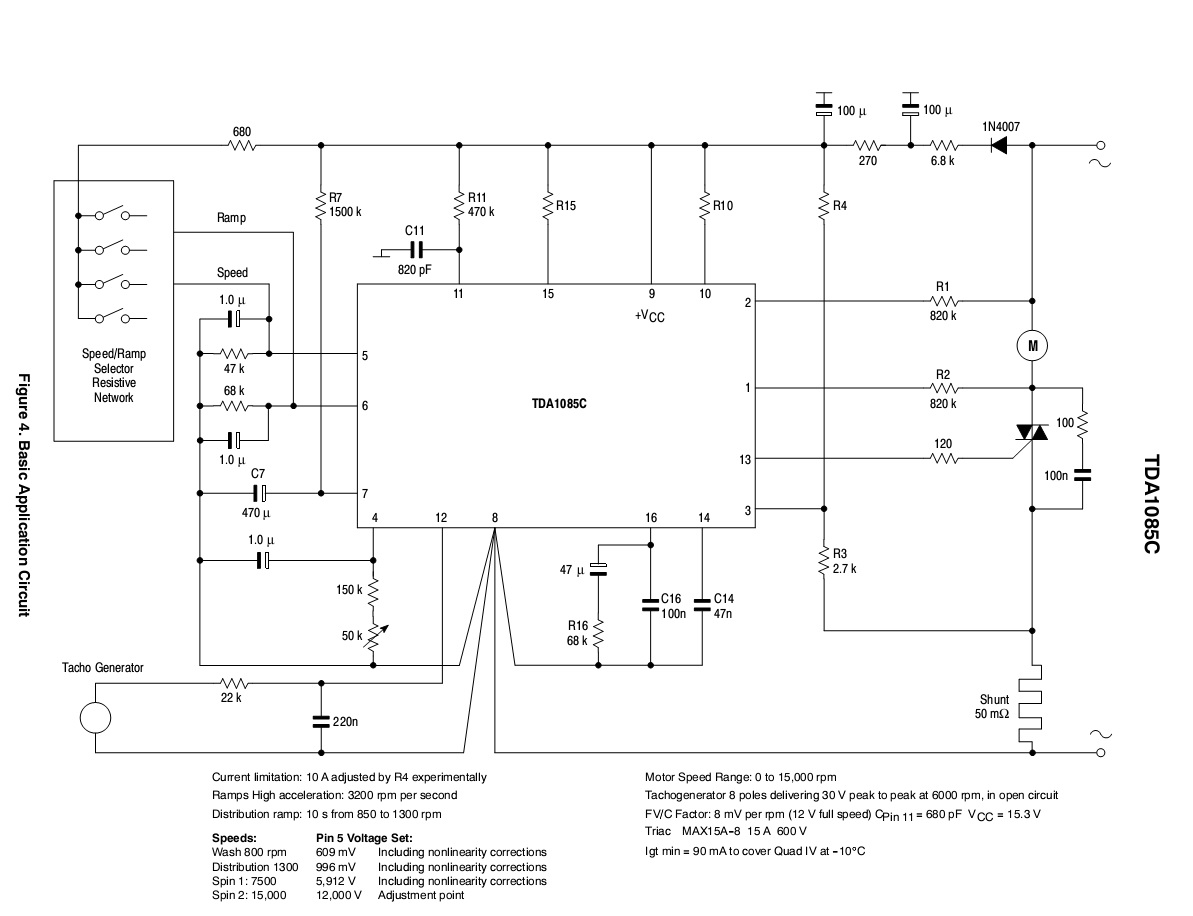 Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.

Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.

Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров.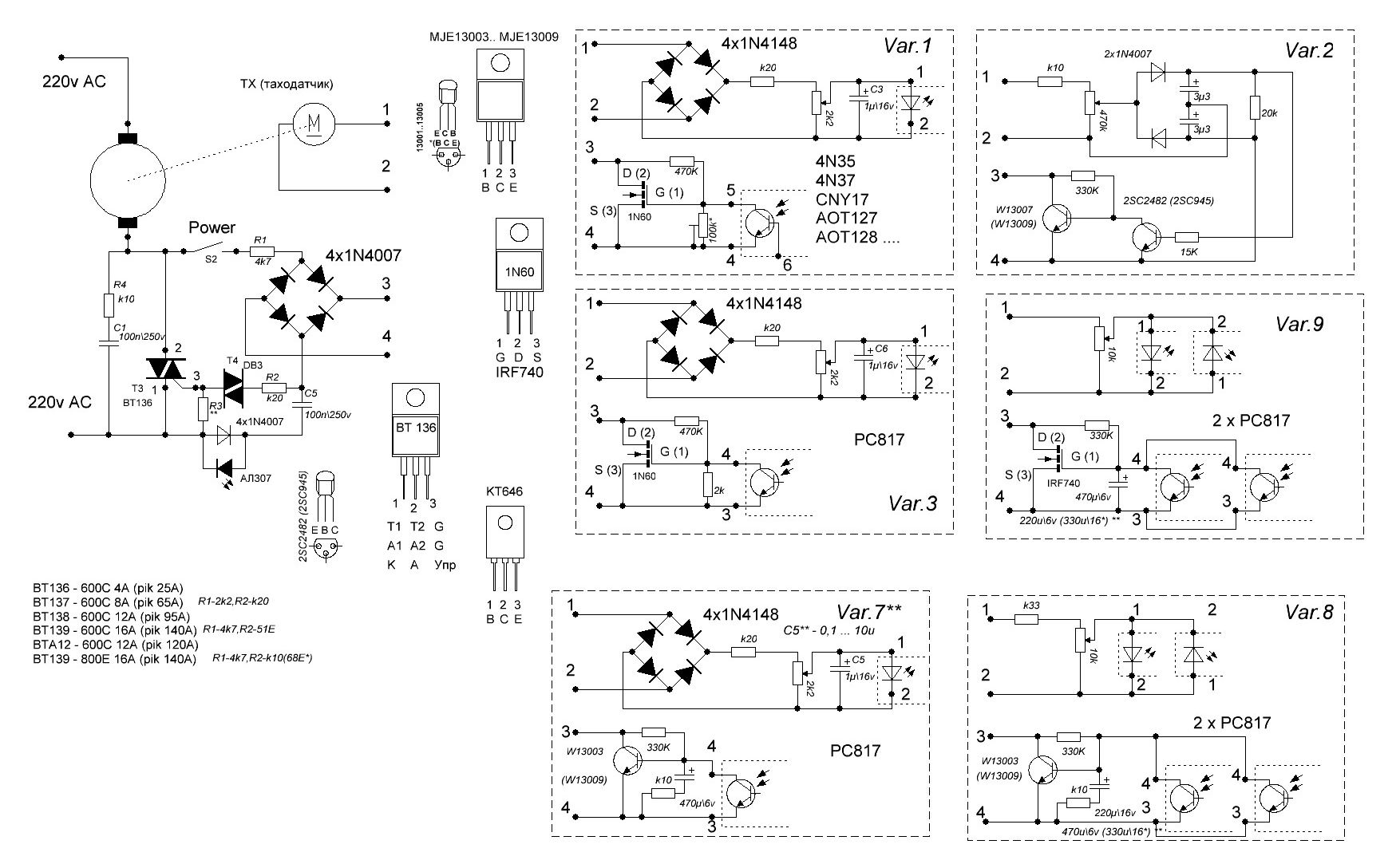 Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью.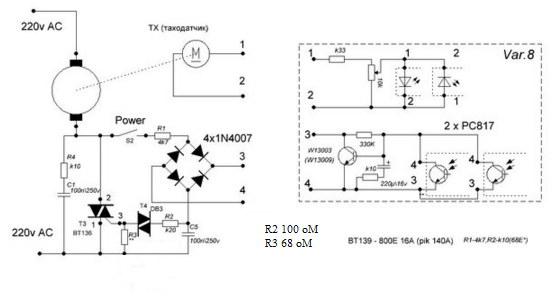 Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
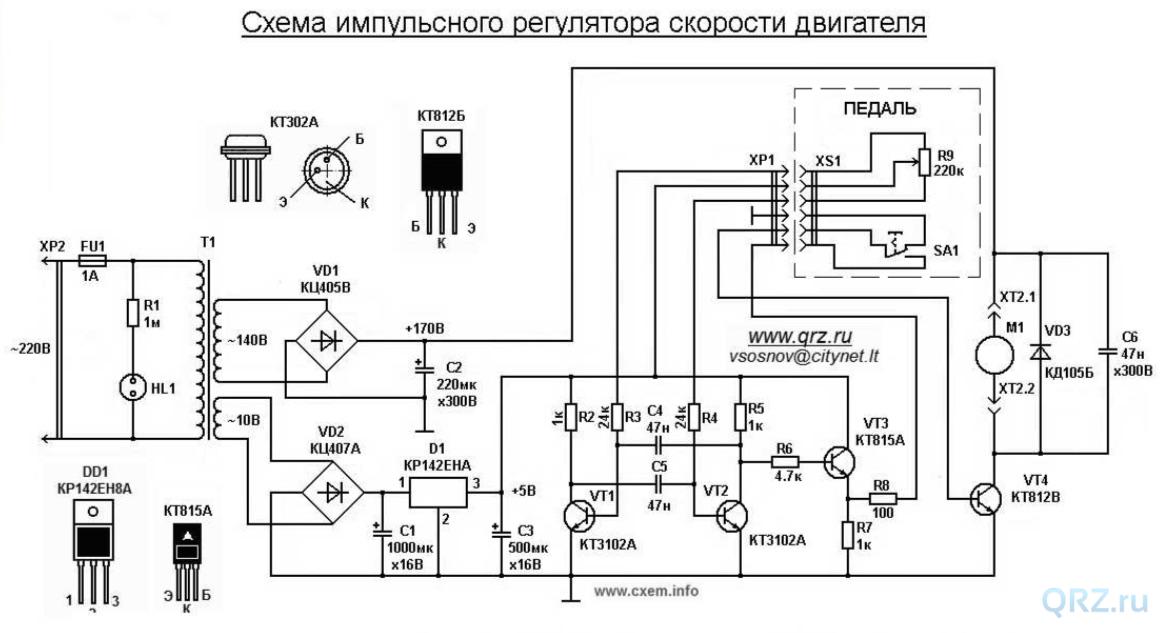
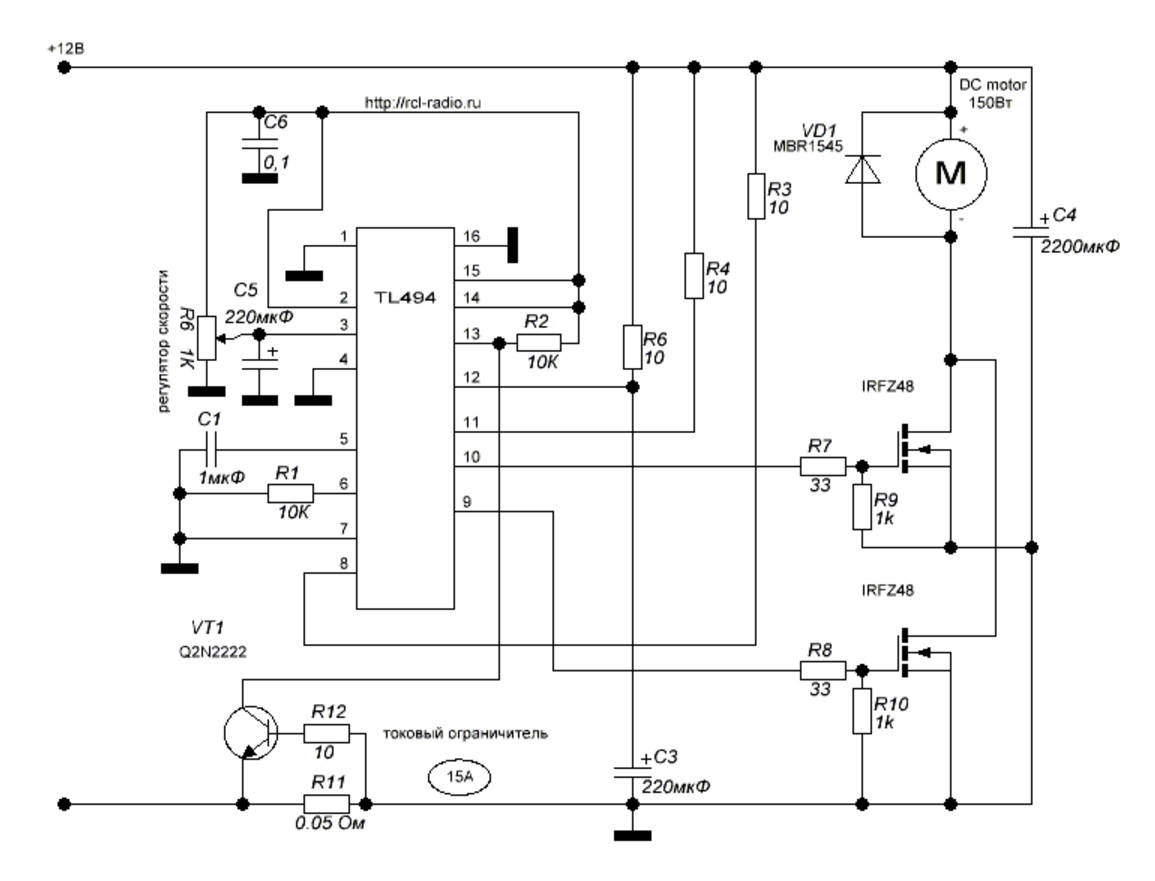
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
 Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс.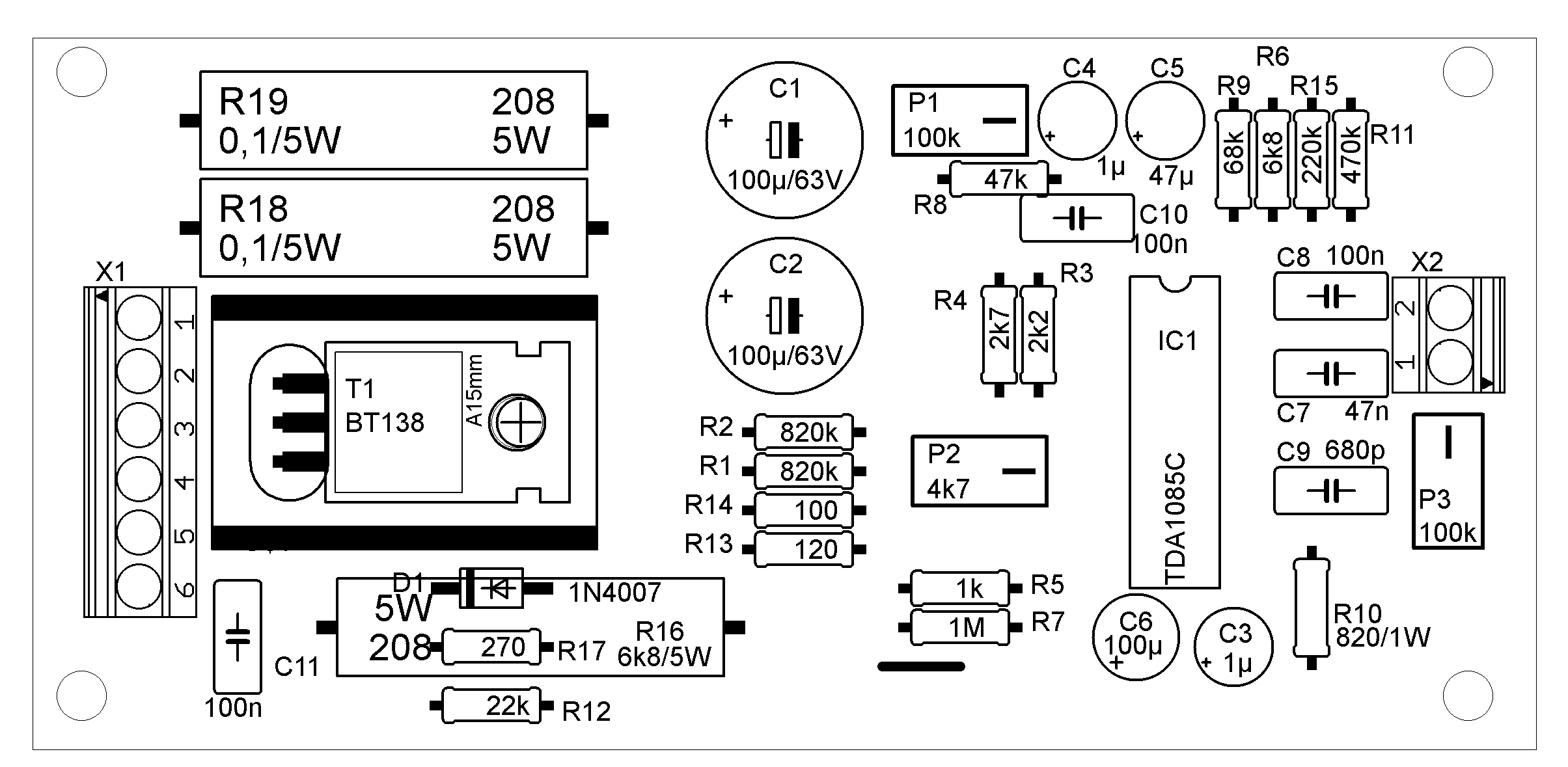 На рисунке не указано.
На рисунке не указано.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
 Он реализован по выводам 9, 10.
Он реализован по выводам 9, 10.Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Регулятор оборотов электродвигателя 220в без потери мощности
Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Виды двигателей
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора.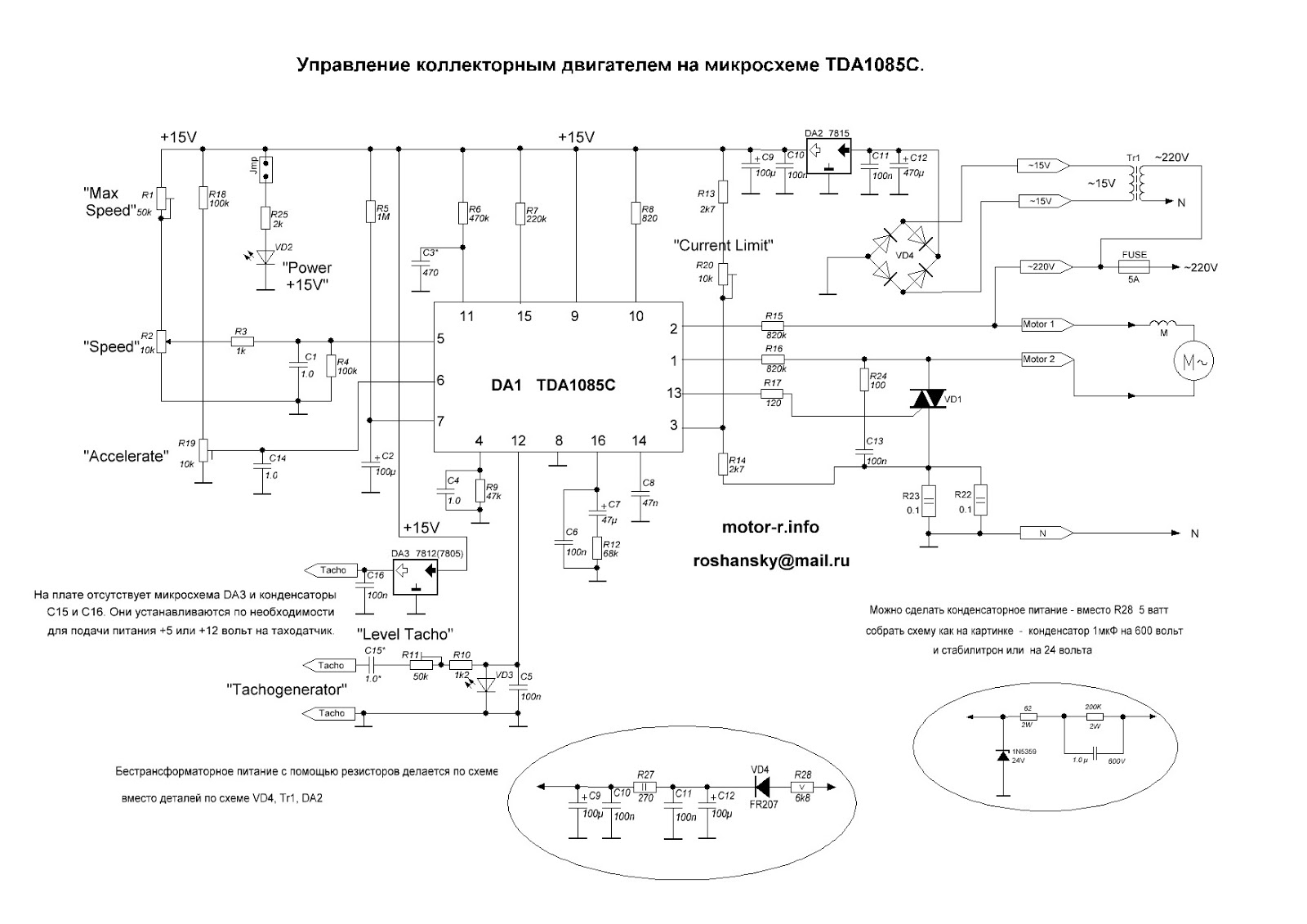 C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на:
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка.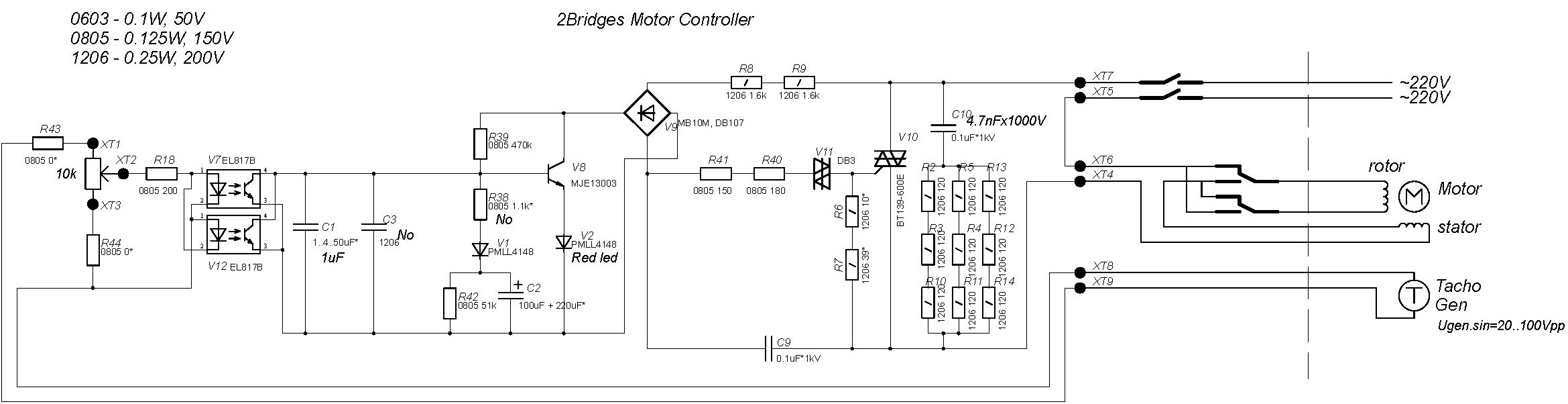 Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.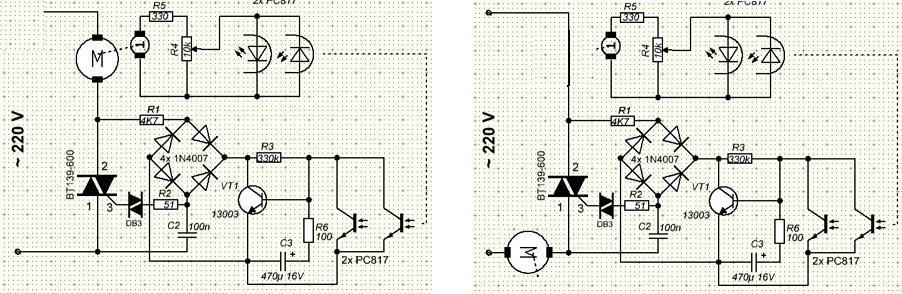
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм. Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.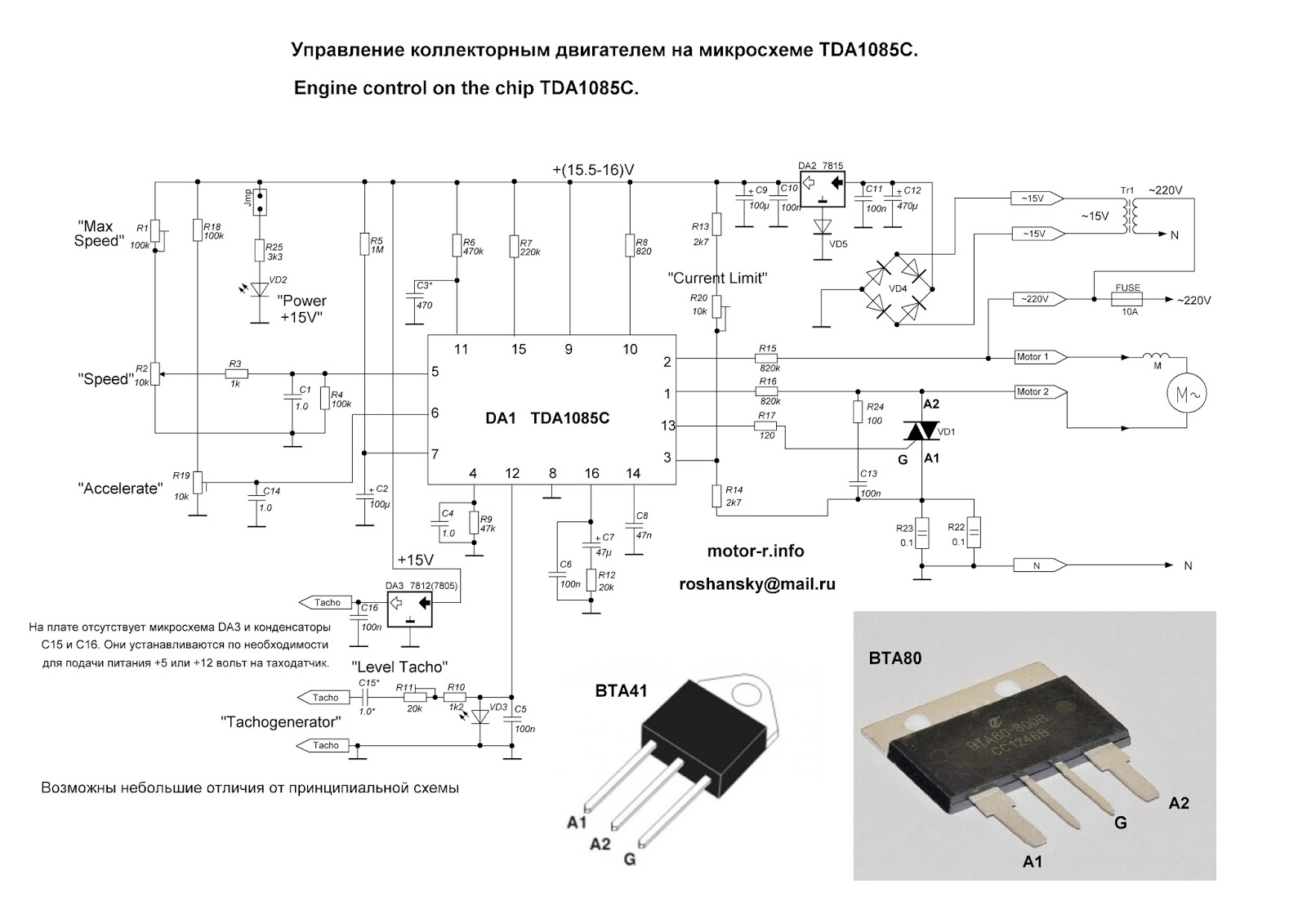
Принципиальные электросхемы, подключение устройств и распиновка разъёмов
Качественный и надёжный контроллер скорости вращения для однофазных коллекторных электродвигателей можно сделать на распространённых деталях буквально за 1 вечер. Эта схема имеет встроенный модуль обнаружения перегрузки, обеспечивает мягкий пуск управляемого двигателя и стабилизатор скорости вращения мотора. Работает такой блок с напряжением как 220, так и 110 вольт.
Технические параметры регулятора
- напряжение питания: 230 вольт переменного тока
- диапазон регулирования: 5…99%
- напряжение нагрузки: 230 В / 12 А (2,5 кВт с радиатором)
- максимальная мощность без радиатора 300 Вт
- низкий уровень шума
- стабилизация оборотов
- мягкий старт
- размеры платы: 50×60 мм
Принципиальная электросхема
Схема модуля системы регулирования основана на генераторе ШИМ импульсов и симисторе управления мотором — классическая схемотехника для подобных устройств.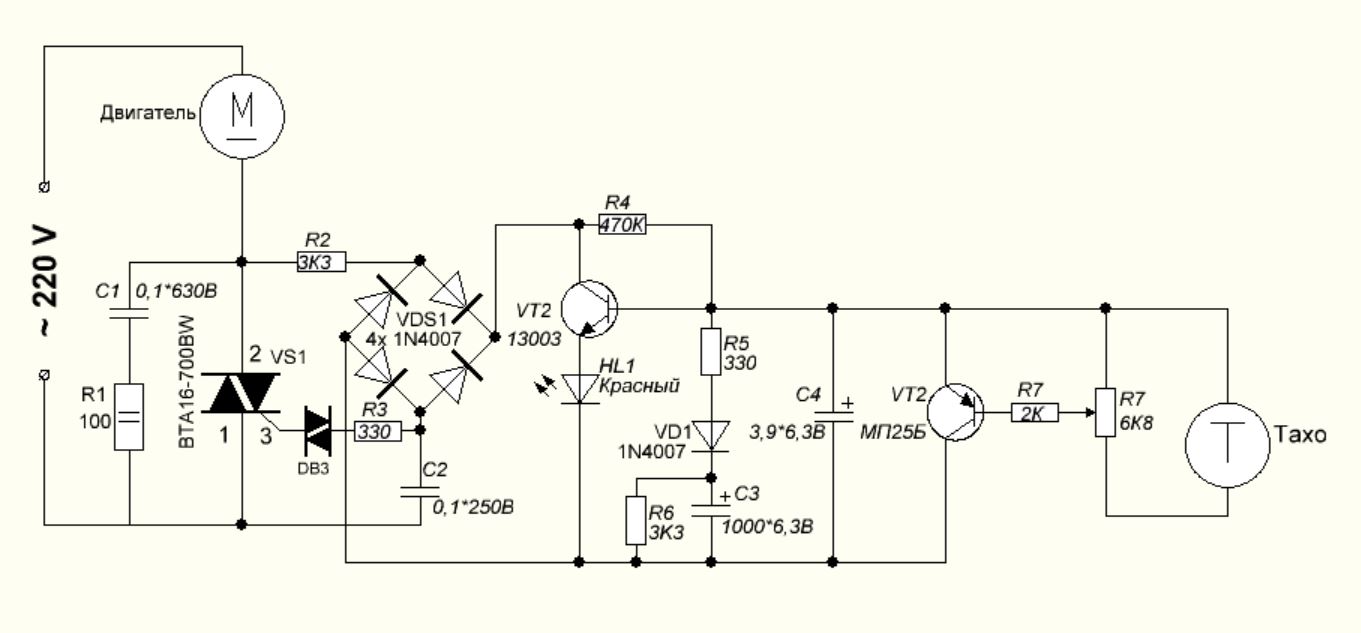 Элементы D1 и R1 обеспечивают ограничение величины напряжения питания до значения безопасной для питания микросхемы генератора. Конденсатор C1 отвечает за фильтрацию напряжения питания. Элементы R3, R5 и P1 являются делителем напряжения с возможностью его регулирования, который используется для задания величины мощности, подаваемой в нагрузку. Благодаря применению резистора R2, непосредственно входящего в цепь поступления на м/с фазы, внутренние блоки синхронизированы с симистором ВТ139.
Элементы D1 и R1 обеспечивают ограничение величины напряжения питания до значения безопасной для питания микросхемы генератора. Конденсатор C1 отвечает за фильтрацию напряжения питания. Элементы R3, R5 и P1 являются делителем напряжения с возможностью его регулирования, который используется для задания величины мощности, подаваемой в нагрузку. Благодаря применению резистора R2, непосредственно входящего в цепь поступления на м/с фазы, внутренние блоки синхронизированы с симистором ВТ139.
На следующем рисунке показано расположение элементов на печатной плате. Во время монтажа и запуска следует обратить внимание на обеспечение условий безопасной работы — регулятор имеет питание от сети 220В и его элементы непосредственно подключены к фазе.
Увеличение мощности регулятора
В испытательном варианте был применен симистор BT138/800 с максимальным током 12 А, что дает возможность управления нагрузкой более 2 кВт. Если необходимо управление ещё большими токами нагрузки — советуем тиристор установить за пределами платы на большом радиаторе. Также следует помнить о правильном выборе предохранителя FUSE в зависимости от нагрузки.
Также следует помнить о правильном выборе предохранителя FUSE в зависимости от нагрузки.
Кроме управления оборотами электромоторов, можно без каких-либо переделок использовать схему для регулировки яркости ламп.
Схема регулятора оборотов дрели
На рисунке ниже рассмотрена схема регулятора оборотов электродвигателя дрели, собранного в облике отдельного наружного блока и подходящего для всех дрелей мощностью до 1,8 кВт, также для других схожих устройств, где употребляется коллекторный движок переменного тока, допустим, в болгарках. Детали регулятора на схеме подобраны для типовой дрели мощностью около 270 Вт, 650 об/мин, напряжение 220В.
Тиристор типа КУ202Н с намерением его обычного остывания смонтирован на радиаторе. Чтоб задать подходящую частоту вращения электродвигателя шнур регулятора подсоединяют в сетевую розетку 220 В, а дрель включают уже туда. Потом, двигая ручку переменного сопротивления R задают требуемые обороты для старенькой дрели.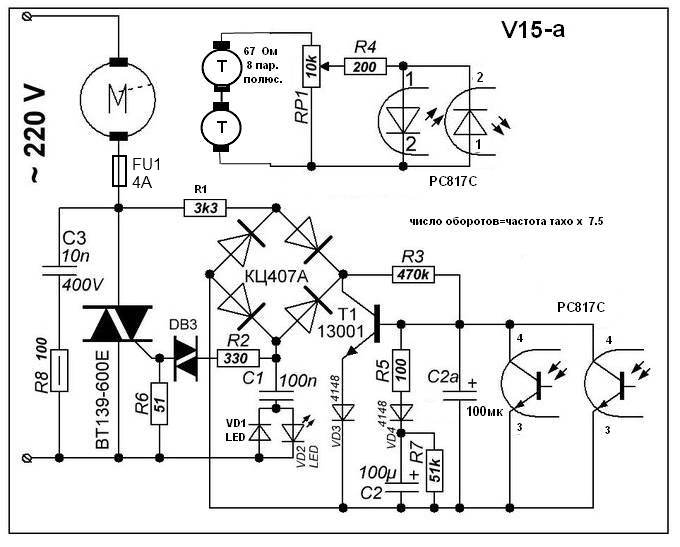
Представленная схема довольно ординарна для повторения даже начинающим радиолюбителем. Нужные для сборки составляющие и детали дешевы и просто доступны. Рекомендуется сборка конструкции в отдельном коробе с розеткой. Такое устройство можно использовать в роли переноски с типовым регулятором мощности
Читайте так же
Механизм работы этой радиолюбительской самоделки последующий, когда нагрузка маленькая, то ток течет небольшой, как только нагрузка растет, обороты плавненько увеличиваются.
ЧАСТОТНИК/
РЕГУЛЯТОР ОБОРОТОВ БЕЗ ПОТЕРИ МОЩНОСТИ
частотник, с целью повышения и уменьшения оборотов, без потери мощности. ХОЧЕШЬ ТАКОЙ ЖЕ? ПОКУПАЙ ПРЯМО .
Регулятор оборотов для дрели, УШМ, электро рубанка и тд.
Регулятор оборотов для дрели который мне обошелся чуть больше доллара.
Читайте так же
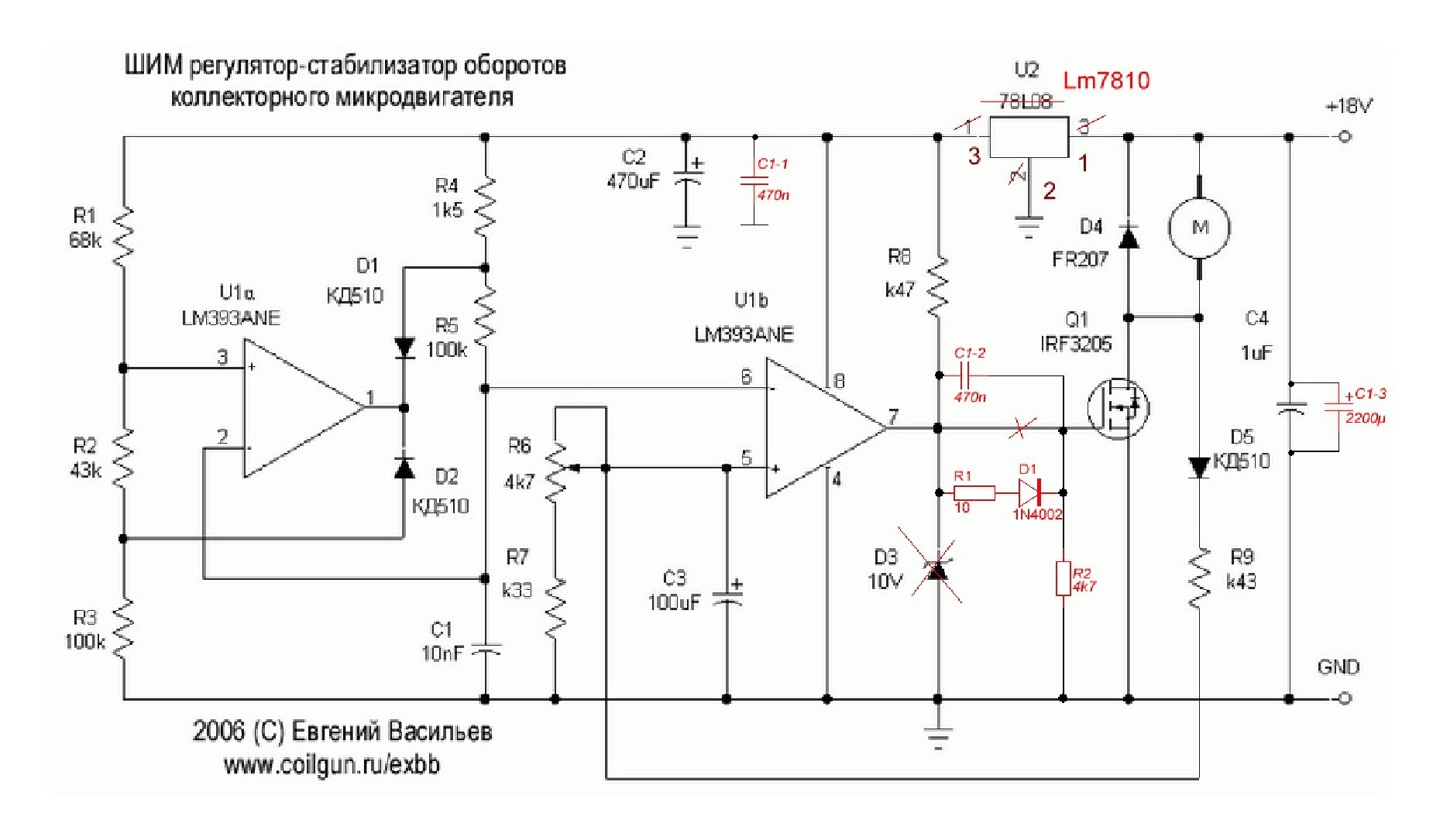
Микросборку LM317 требуется установить на радиатор. Диоды 1N4007 можно заменить на аналогичные рассчитанные на ток не ниже 1А. Печатная плата сделана на одностороннем стеклотекстолите. Сопротивление R5 мощностью не ниже 2Вт, или проволочное.
Источник питания на напряжение 12В должен иметь небольшой запас по току. Резистором R1 задаем необходимую частоту вращения на холостом ходу. Сопротивление R2 необходимо для установки чувствительности по отношению к нагрузке, им задается требуемый момент увеличения числа оборотов микродрели. Если увеличить емкость C4, то растет время задержки высоких оборотов.
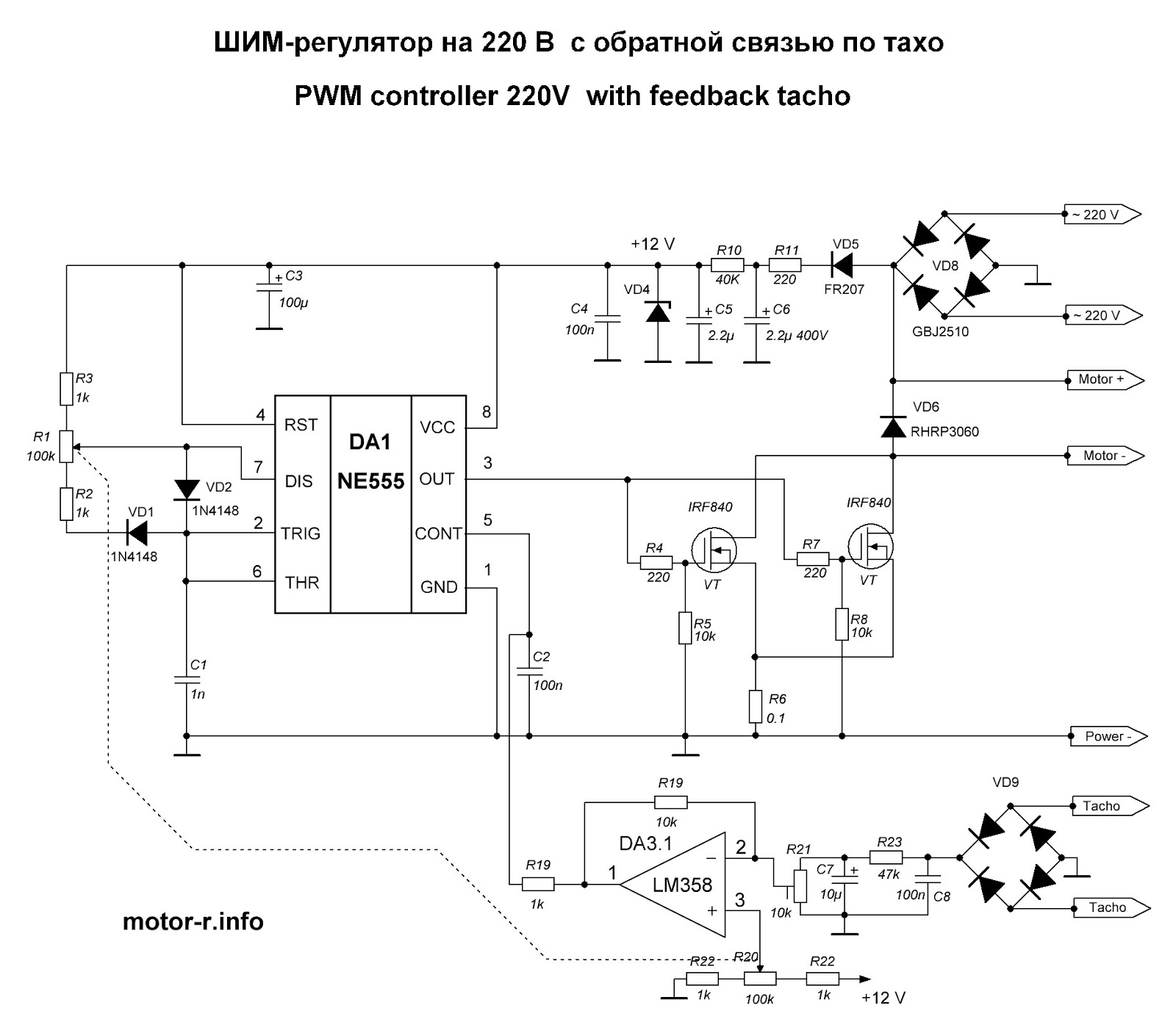
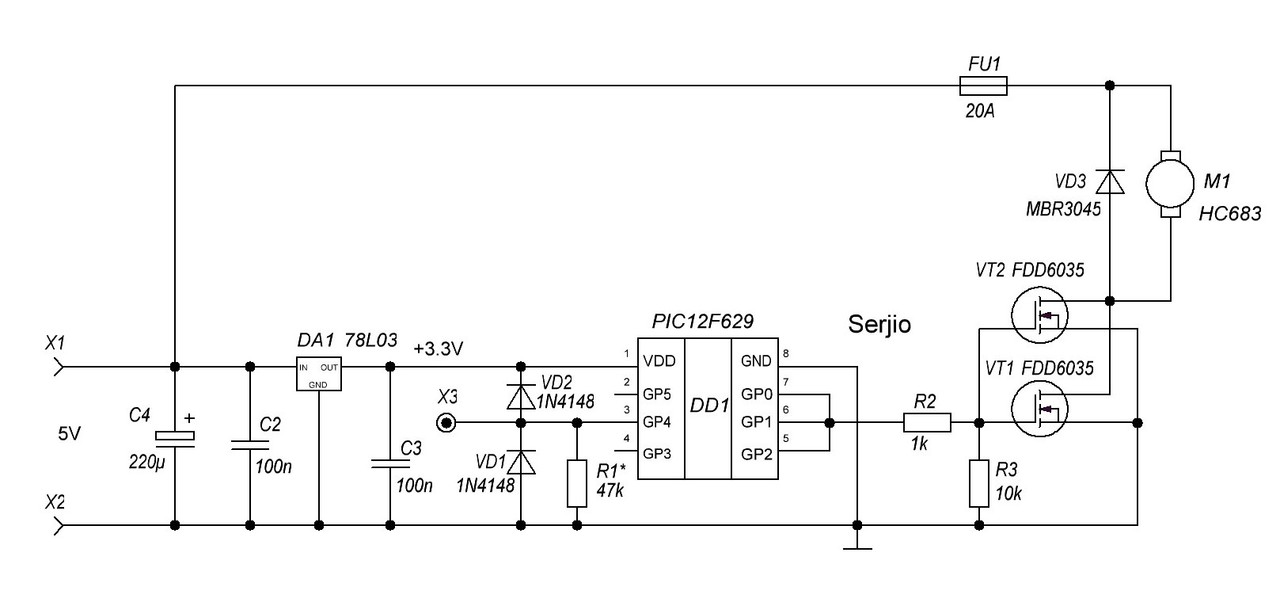
Представленная ниже схема позволяет собрать очень простой, дешевый и полезный регулятор скорости вращения 12-вольтной микродрели для сверления отверстий в печатных платах в радиолюбительской практике.
Микросборка LM555 используется в роли широтно-импульсного модулятора. Питающее напряжение для ШИМ понижается и стабилизируется с помощью микросхемы LM7805). Прецизионный подстроечный резистор P1 на 50 КОм позволяет регулировать скорость вращения дрели. Полевой транзистор IRL530N применяется в роли выходного приводного элемента и может коммутировать ток до 27А. Кроме того он обладает быстрым временем переключения и малым сопротивлением. Диод 1N4007 нужен для защиты от ЭДС противодействия. В качестве альтернативы можно взять диод Шоттки MBR1645.
Питающее напряжение для ШИМ понижается и стабилизируется с помощью микросхемы LM7805). Прецизионный подстроечный резистор P1 на 50 КОм позволяет регулировать скорость вращения дрели. Полевой транзистор IRL530N применяется в роли выходного приводного элемента и может коммутировать ток до 27А. Кроме того он обладает быстрым временем переключения и малым сопротивлением. Диод 1N4007 нужен для защиты от ЭДС противодействия. В качестве альтернативы можно взять диод Шоттки MBR1645.
ШИМ (широтно-импульсная модуляция), используемая в этой конструкции, является эффективным методом изменения скорости и мощности для всех двигателей постоянного тока.
Читайте так же
Похожие записи
Насадка-Ножницы На Дрель Сверчок
Насадка-ножницы на дрель Сверчок Читайте так же Дрель Шуруповерт Интерскол Да 12эр 02… от 2850 до 3713 Код производителя: 1244692 Принципиальной особенностью -12ЭР-01 является компактность. миф маленький и наряду с этим многофункциональный инструмент отлично подходит для выполнения работ в недоступных местах, он употребляется как для выполнения сверлений отверстий, так для закручивания/откручивания шурупов.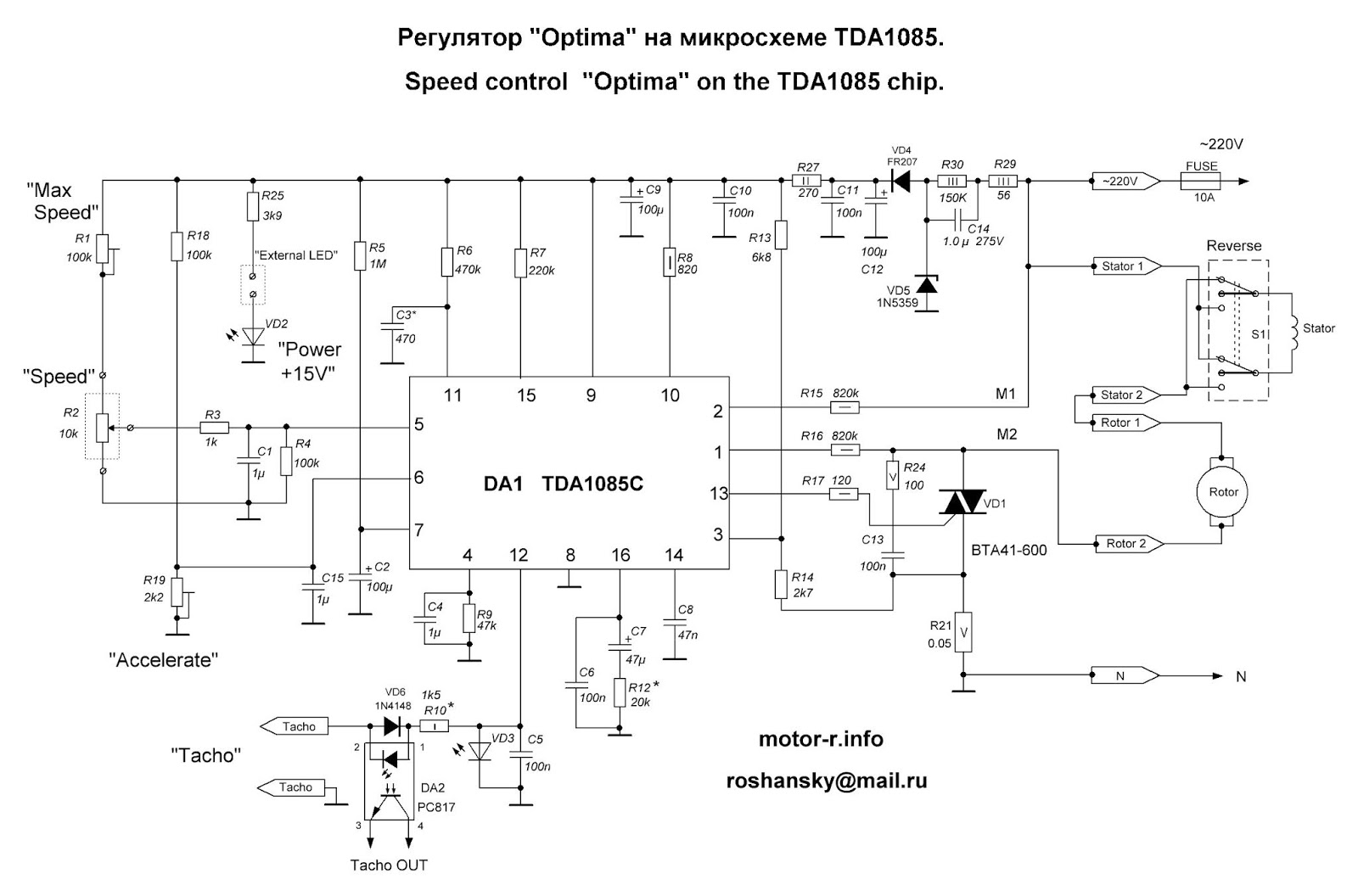 Двухскоростной редуктор … […]
Двухскоростной редуктор … […]
Дрель Электрическая Какую Выбрать
Черта среди Для облегчения строй иначе говоря ремонтов применяется много инструментов, которые существенно уменьшают время на произведение разных операций. Дрели являются самым фаворитных таких аппаратов. Они используются фактически всюду, при их отсутствии не обходится ни какой ремонт. Основное предназначение инструмента – сверление различных по плотности материалов и штробление стенок для укладки электронной проводки и коммуникаций. […]
Что Такое Дрель Шуруповерт
Наверное в каждом доме имеются разные инструменты, нужные для облегчения ремонтных операций и бытовых нужд. Вместе с ним проще и резвее прибить гвоздь, прикрутить болтик и т.д. И так как большинство владеют большими габаритами, животрепещущим считается приобретения универсальных устройств. В этот список есть вариант, например, отнести электронную дрель—шуруповерт. Грубо говоря, дрель-шуруповерт представляет из себя инструмент, […]
Регулятор оборотов коллекторного двигателя — своими руками, схема
При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.
Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.
Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения.
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Действие любого электродвигателя построено на очень простом принципе: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси, и пустить по ней постоянный ток, то рамка станет поворачиваться. Направление вращения определяется согласно «правилу правой руки».
Эту закономерность можно использовать для работы коллекторного двигателя.
Важным моментом здесь является подключение тока к этой рамке. Поскольку она вращается, для этого используются специальные скользящие контакты. После того, как рамка повернётся на 180 градусов, ток по этим контактам потечёт в обратном направлении. Таким образом, направление вращения останется прежним. При этом, плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков рамок.
Сложности и особенности
Сложность создания регулятора оборотов коллекторного двигателя заключается в том, что устройство потребляет не только активную, но и реактивную мощность, которая увеличивается при повышении оборотов.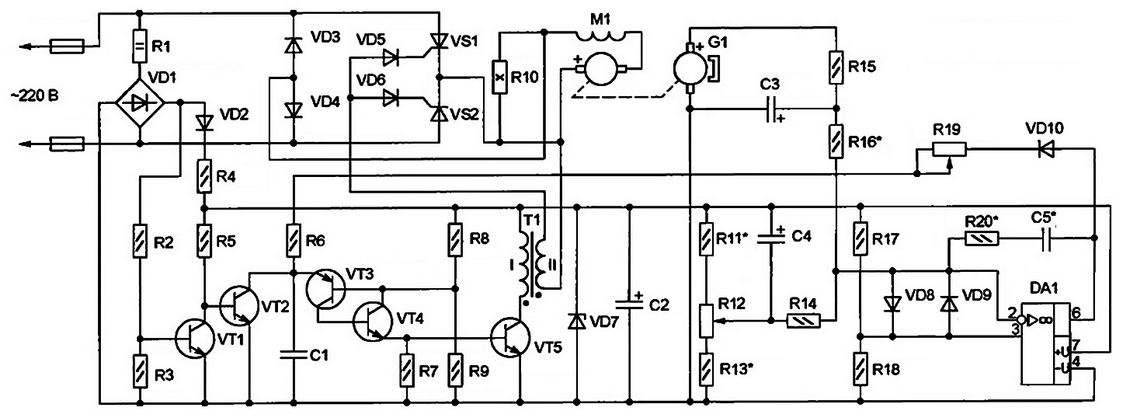 Главной задачей является выравнивание и сокращение разрыва между двумя этими характеристиками.
Главной задачей является выравнивание и сокращение разрыва между двумя этими характеристиками.
Мощность коллекторного двигателя это произведение потребляемого им тока, на напряжение сети. Общее ее значение складывается из активной и реактивной.
В домашних условиях довольно тяжело привести к пустые потери к нуля. Для этого необходимо, чтобы прибор испытывал только активную нагрузку, что можно получить, только используя полупроводниковые резисторы.
Устройство
Коллекторный двигатель состоит обычно из ротора (якоря), статора, щёток и тахогенератора:
- Ротор — это вращающаяся часть, статор — это внешний магнит.
- Щётки, сделанные из графита – это основная часть скользящих контактов, через которую на вращающийся якорь подаётся напряжение.
- Тахогенератор – это прибор, который отслеживает характеристики вращения. В случае нарушения равномерности движения, он корректирует поступающее в двигатель напряжение, тем самым делая его более плавным.
- Статор может содержать не один магнит, а, например, 2 (2 пары полюсов). Также, вместо статических магнитов, здесь могут быть использованы и катушки электромагнитов. Работать такой мотор может как от постоянного, так и от переменного тока.

Простота регулировки скорости коллекторного двигателя определяется тем, что скорость вращения прямо зависит от величины поданного напряжения.
Кроме этого, важной особенностью является то, что ось вращения непосредственно можно присоединять к вращающемуся инструменты без использования промежуточных механизмов.
Если говорить об их классификации, то можно говорить о:
- Коллекторных двигателях постоянного тока.
- Коллекторных двигателях переменного тока.
В этом случае, речь идёт о том, каким именно током происходит питание электродвигателей.
Разница состоит в том, как организованы эти подключения.
Тут принято различать:
- Параллельное возбуждение.
- Последовательное возбуждение.
- Параллельно-последовательное возбуждение.
Принцип работы
Для сборки лучше всего выбрать тиристорный преобразователь, он позволит осуществлять изменение режима работы без существенных потерь.
К тому же, благодаря нему будут настроены такие функции как:
- Разгон-торможение.
- Жесткое регулирование характеристик.
- Переключение на реверсивное движение.
К тому же у него импульсно-фазовое управление. Которое, позволяет не терять момент вращения ротора, не увеличивая потери на реактивной характеристике.
Схема регулятора оборотов будет состоять из следующих ключевых узлов:
- Управляемый выпрямитель сигнала.
- Блок регулирования.
- Система обратной связи.
- Регулятор мощности сети.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.

- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Двигатель
В зависимости от принципа управления и характеристик, существуют различные типы двигателей. Остановиться стоит только на двух, в одном используется обмотка возбуждения, а в другом постоянный магнит. В зависимости от выполняемой работы нужно правильно подобрать тип агрегата.
Если необходимо регулировать частоту вращения от минимального до конкретного значения, например в дрели. То лучше выбирать схему с постоянным магнитом.
В тех же случаях, когда минимальное значение вращения будет равняться 0 оборотов, лучше использовать обмотку возбуждения.
 Такая схема подойдет для регуляторов оборотов кулера компьютера.
Такая схема подойдет для регуляторов оборотов кулера компьютера.Двигатель конструктивно состоит из следующих узлов:
- Якорь, он же ротор, на котором имеется обмотка.
- Коллектор, который выпрямляет ток.
- Статор, обмоткой которого создается магнитное поле.
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Читать также: Что такое тигли фото
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т. к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Регулятор
Закончив с двигателем и разобравшись с его показателями и режимом работы можно делать регулятор оборотов асинхронного двигателя своими руками.
Необходимо добиться следующих целей:
- Регулировка должна осуществляться от нуля оборотов до максимально возможных значений.
- На низких скоростях крутящий момент должен быть самым высоким.
- Нужно добиться плавного изменения количества оборотов.
Особенности подключения
При подключении проводов и соединении основных узлов между собой следует придерживаться следующим рекомендаций:
- Провода не должны быть слишком длинными. Особенно если речь идет о регуляторе оборотов бесколлекторного двигателя.
- Обмотка не должна быть повреждена.
- Места соединения должны быть надежно запаяны и изолированы друг от друга.
 Особенно если речь идет о регуляторе оборотов бесколлекторного двигателя.
Особенно если речь идет о регуляторе оборотов бесколлекторного двигателя.Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Пошаговая инструкция
Классическая схема синистора работает по принципу зарядки конденсатора через мало ёмкий резистор. После того, как напряжение между обкладками достигнет нужного значения, симистор начинает пропускать ток к нагрузке.
После того, как напряжение между обкладками достигнет нужного значения, симистор начинает пропускать ток к нагрузке.
Таким образом, можно контролировать емкость конденсатора, изменяя напряжение, которое пойдет на нагрузку. Для этого отлично подойдет реостат, который устанавливается на место резистора.
К сожалению, такая схема быстро нагревается из-за чего нужно устанавливать дополнительный радиатор позволяющий эффективно отводить тепло.
Более подходящей схемой, позволяющей сохранить потерянную мощность и точнее контролировать работу, является коммутация с силовыми резисторами. Их работа основана многократном открытии и закрытии за один период электрической синусоиды.
Данная установка может осуществлять работу от внутреннего накопителя с напряжением 12 В и внешнего 220 В. Однако в таком случае требуется гасящая схема.
В таком режиме работы можно изменять пороговую мощность, это напрямую влияет на мощность работы ротора.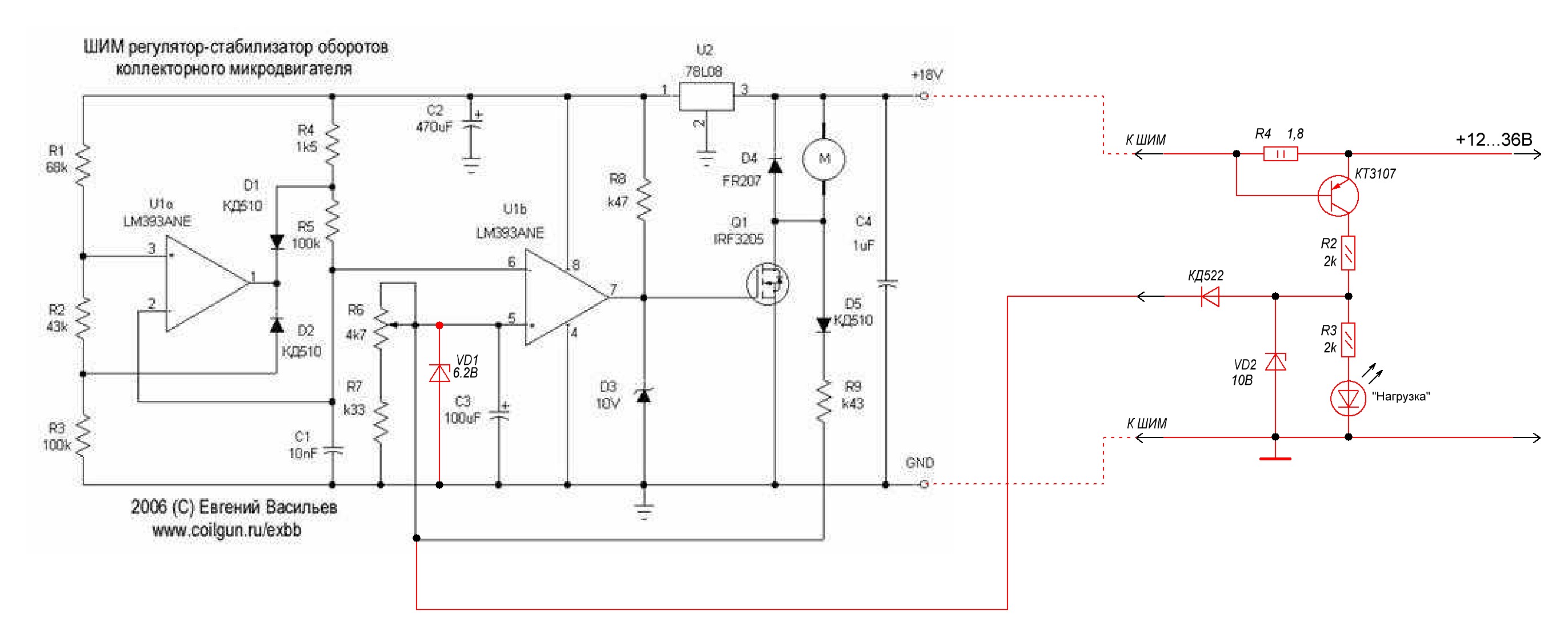 Силовые резисторы выставляются на определенные показания входящего тока, собирая его в нужных объемах.
Силовые резисторы выставляются на определенные показания входящего тока, собирая его в нужных объемах.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.
Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения.
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Фото регулятора оборотов своими руками
Регулировка оборотов двигателя от стиральной машины
Регулировка оборотов двигателя стиральной машины может потребоваться любому домашнему самоделкину, который решит приспособить деталь отслужившей помощницы.
Простое подключение двигателя стиральной машины к питанию не дает много проку, поскольку он выдает сразу максимальные обороты, а ведь многие самодельные приборы требуют увеличения или уменьшения оборотов, причем желательно без потери мощности. В этой публикации мы и поговорим о том, как подключить двигатель от стиралки, и как сделать для него регулятор оборотов.
Сначала подключим
Прежде чем регулировать обороты двигателя стиральной машины, его нужно правильно подключить. Коллекторные двигатели от стиральных машин автомат имеют несколько выходов и многие начинающие самоделкины путают их, не могут понять, как осуществить подключение. Расскажем обо всем по порядку, а заодно и проверим работу электродвигателя, ведь существует же вероятность, что он вовсе неисправен.
- Для начала нужно взять двигатель от стиральной машины, покрутить его и найти катушки возбуждения или башмаки, от которых должно идти 2, 3 и более проводов. Башмаки выглядят примерно так, как показано на рисунке ниже.
- Берем омметр, выставляем тумблер на минимальное сопротивление и начинаем поочередно звонить все выходы. Наша задача выбрать из всех выходов катушки возбуждения 2, у которых значение сопротивления больше всех, если их всего два, то ничего выбирать не нужно.
- Далее нужно найти коллектор двигателя и щетки, от которых также будут идти 2 провода. В данном случае выхода будет только два, если их больше, значит, вы что-то перепутали или один из проводов банально оторван.
- Следующая группа выходов, которые нам позарез нужно обнаружить – это выходы таходатчика. В ряде случаев провода, идущие от таходатчика, можно заметить прямо на корпусе двигателя, но иногда их прячут в недра корпуса и тогда, чтобы подключиться, приходится частично разбирать двигатель.
 В данном случае выхода будет только два, если их больше, значит, вы что-то перепутали или один из проводов банально оторван.
В данном случае выхода будет только два, если их больше, значит, вы что-то перепутали или один из проводов банально оторван.К сведению! Таходатчики, имеющие два выхода, легко прозваниваются омметром. А вот аналогичные детали с тремя выходами не звонятся ни по одному направлению.
- Далее берем один провод, идущий от коллектора, и соединяем с одним из проводов катушки.
- Второй провод коллектора и второй провод катушки подключаем к сети 220 В.
- Если нам нужно поменять направление вращения якоря, то мы просто меняем местами подключаемые провода, а именно первый провод коллектора и первый провод катушки включаем в сеть, а вторые провода соединяем между собой.
- Отмечаем ярлычками провода катушки, таходатчика и коллектора, чтобы не перепутать и производим пробный пуск двигателя.
Если пробный запуск прошел успешно, а именно, двигатель плавно набрал обороты без заеданий и рывков, щетки не искрили, можно приступать к подключению двигателя стиральной машины через регулятор оборотов. Существует множество схем подключения двигателя через регулятор, как и схем самого регулятора, рассмотрим два варианта.
Подключим через регулятор напряжения
Простейший вариант регулировки электродвигателя стиральной машины – использование любого регулятора напряжения (диммера, гашетки от дрели и прочего). Смысл регулировки в том, что на двигатель подается сначала максимальное напряжение, и он вращается с максимальной скоростью. Поворачивая тумблер диммера, мы уменьшаем напряжение, и двигатель соответственно начинает снижать обороты. Схема подключения следующая:
- один провод катушки соединяем с одним проводом якоря;
- второй провод катушки подключаем к сети;
- второй провод якоря соединяем с диммером, а второй выход диммера подключаем к сети;
- производим пробный пуск двигателя.
Проверяем, как работает двигатель на минимальной мощности. Вы можете убедиться, что даже на минимальной мощности обороты без нагрузки внушительны, но стоит только прислонить деревянный брусочек к вращающейся оси, и двигатель тут же останавливается. Каков вывод? А вывод таков, что данный способ регулировки оборотов электродвигателя стиральной машины приводит к катастрофической потере мощности при уменьшении напряжения, что неприемлемо, если вы собираетесь делать из двигателя какую-то самоделку.
Важно! При запуске двигателя стиральной машины соблюдайте технику безопасности. Обязательно закрепите двигатель перед пуском, кроме того не стоит прикасаться руками к вращающимся элементам.
Изначально мы ставили задачу научиться своими руками регулировать обороты двигателя стиральной машины без потери или с минимальной потерей мощности, но возможно ли это? Вполне возможно, просто схема подключения несколько усложнится.
Через микросхему
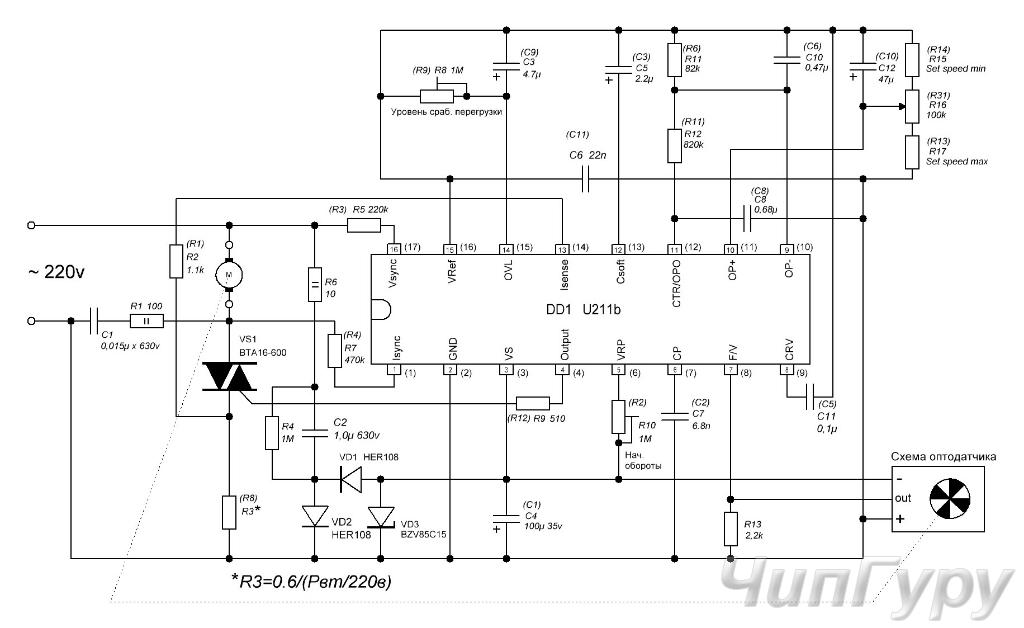
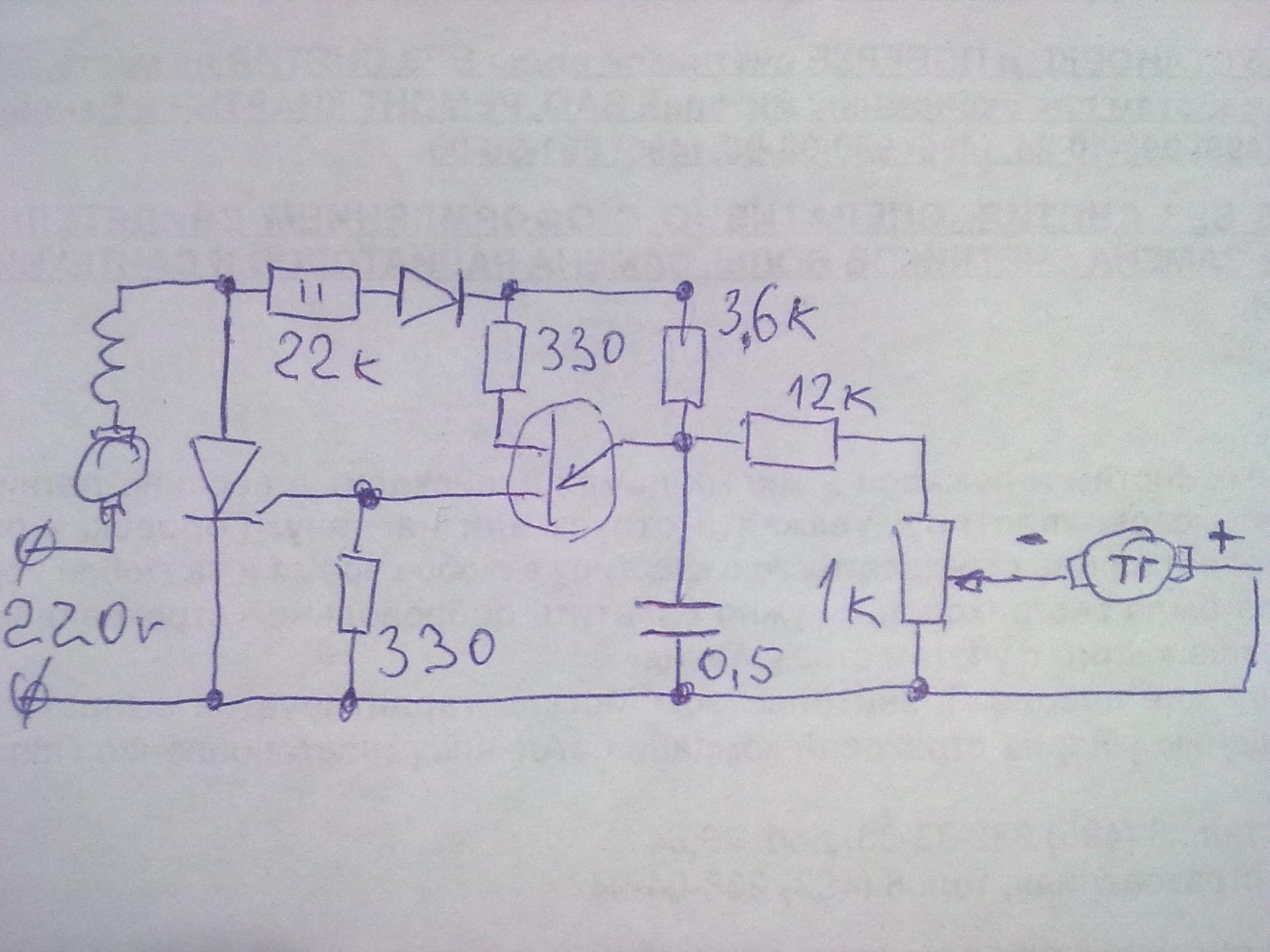
Пришло время вспомнить про таходатчик и его выходы, которые мы на двигателе нашли, но до поры отставили в сторону. Именно таходатчик поможет нам подключить двигатель стиралки и регулировать его обороты без потери мощности. Сам таходатчик управлять двигателем не может, он лишь посредник. Реальное управление должно осуществляться посредством микросхемы, которая соединяется с таходатчиком двигателя, обмоткой и якорем и запитывается от сети 220 В. Принципиальную схему вы можете видеть на рисунке ниже.
Именно таходатчик поможет нам подключить двигатель стиралки и регулировать его обороты без потери мощности. Сам таходатчик управлять двигателем не может, он лишь посредник. Реальное управление должно осуществляться посредством микросхемы, которая соединяется с таходатчиком двигателя, обмоткой и якорем и запитывается от сети 220 В. Принципиальную схему вы можете видеть на рисунке ниже.
Что происходит с двигателем, когда мы подключаем его к сети через эту микросхему? А происходит следующее, мы можем запустить двигатель своими руками на максимальных оборотах, а можем, повернув специальный тумблер обороты уменьшить. Даем внезапную нагрузку двигателю, подставив под вращающийся шкив деревянный брусочек. На долю секунды обороты падают, но потом снова восстанавливаются, несмотря на нагрузку.
Дело в том, что таходатчик определяет понижение оборотов из-за возникшей нагрузки и сразу же подает сигнал об этом на управляющую плату. Микросхема, получив сигнал, автоматически добавляет мощность, выравнивая, таким образом, обороты двигателя. Мечта самоделкина, как говорится, сбылась. При наличии такой схемы подключения из двигателя стиральной машины можно сделать и зернодробилку и дровокол и много других полезных вещей.
Мечта самоделкина, как говорится, сбылась. При наличии такой схемы подключения из двигателя стиральной машины можно сделать и зернодробилку и дровокол и много других полезных вещей.
Подводя итог нашего повествования, ответим еще на один резонный вопрос, который может возникнуть у читателя: где взять такую плату? Можно собрать на основе схемы и списка деталей, которые мы прилагаем к настоящей статье, а можно заказать в готовом виде у специалистов. Благо в сети предложений на этот счет достаточно. Искать нужно схему TDA 1085.
регулятор оборотов с поддержанием мощности
Здравствуйте дорогие мои посетители.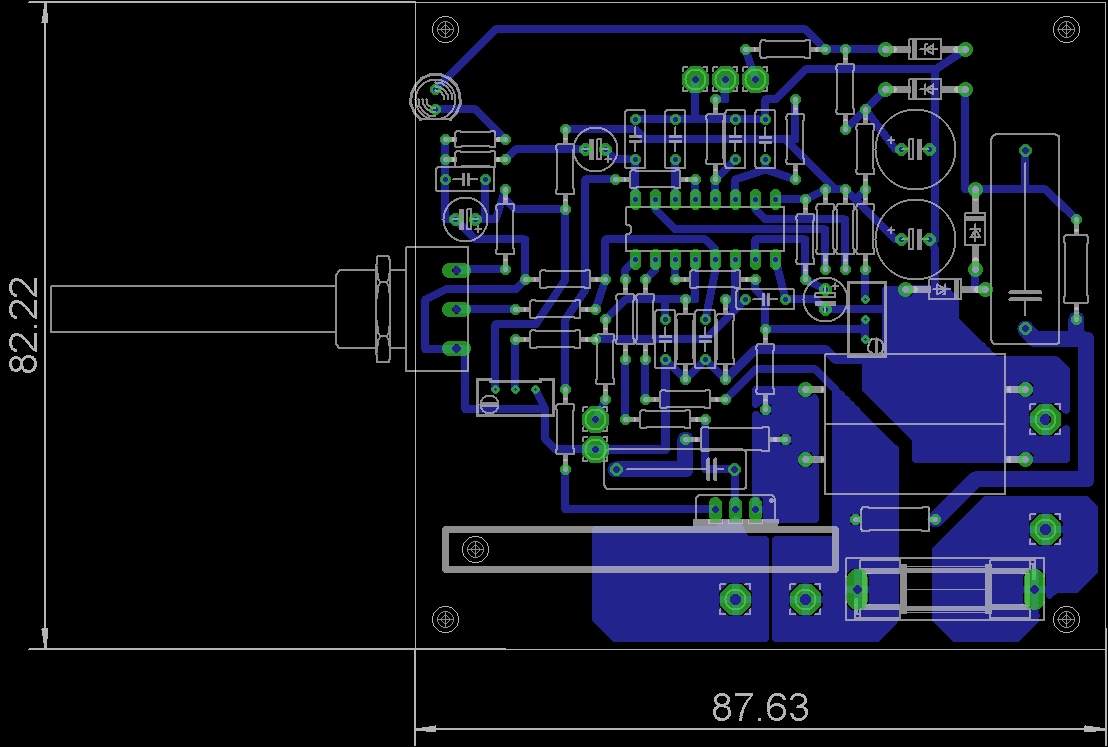 Хочу сегодня продолжить
Хочу сегодня продолжить
тему о коллекторных электродвигателях, а именно как подключить двигатель от
стиральной машины с помощью платы регулирования оборотов с поддержкой мощности.
Как вы, видели, я затрагивал уже эту тему. Снимал по этому поводу видео «Подключение и
регулировка оборотов коллекторного двигателя от стиральной машины-автомат».
Это видео стало очень популярным на моём канале, зрители оставили множество
разных комментариев по этой теме. Также я там выложил источник, где я взял
схему регулятора оборотов с поддержкой мощности коллекторных электродвигателей.
И как мне показалось на тот момент, что человек скачает себе этот файл и
соберет себе такую же схему как у меня, и будет её использовать. Но нет,
оказалось не все так просто как мне этого хотелось, посыпалась, куча вопросов
от людей не только гуманитариев, но и совсем не плохих радиолюбителей. Были
даже предложения о покупке
плат регулирования оборотов.
Что бы сразу ответить на многие вопросы, Вам, мои дорогие
читатели, и появилась эта статья.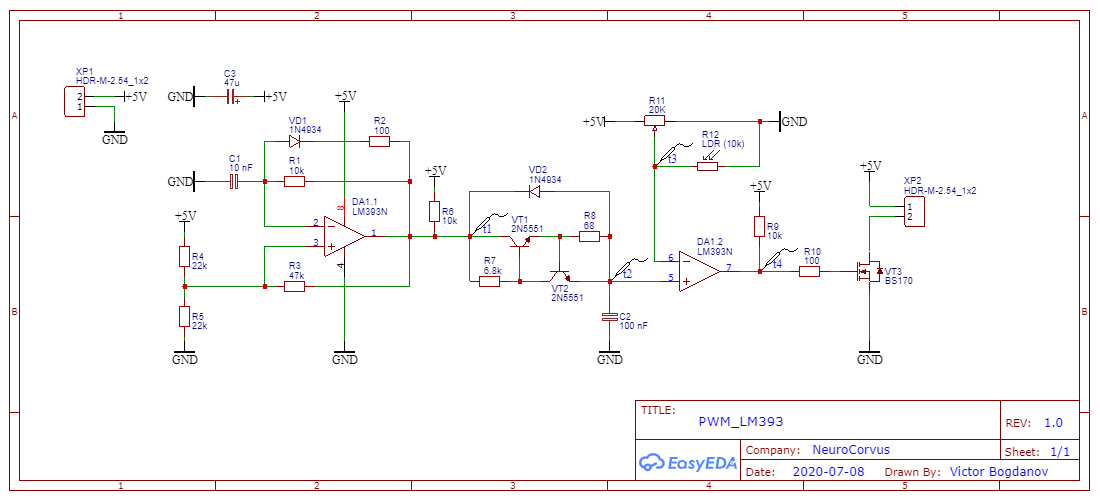
Занимаюсь я ремонтом электроинструмента в
частности перемоткой электродвигателей. И во время ремонта качественного
электроинструмента замечал там «Константную электронику», которая при снижении оборотов на
электроинструменте поддерживала мощность электродвигателя. Меня это очень
заинтересовало, начал пробовать различные простые регуляторы оборотов,
регуляторы оборотов с обратной связью по току, в общем, кучу разных штуковин.
Пока не наткнулся на сайт «chipmaker.ru» где пользователь «Bogdan» выложил «схему управления
коллекторным двигателем на TDA1085». Собственно говоря, вот эта ссылка: http://www.chipmaker.ru/files/file/1490/ . После того как Вы перешли, жмем на кнопку «Загрузить»
В следующем окне обратно жмем «Загрузить»
У нас скачивается архив, разархивировав который, видим в нем
несколько файлов (два варианта схем для управления двигателями постоянного и
переменного тока с монтажными платами), нам для двигателя переменного тока
нужны PSD файлы с
пометкой «АС»
Распечатав их
(принципиальная, монтажная и печатная плата), я отнес их своему очень хорошему
товарищу Игорю , который мне спая регулятор оборотов с поддержкой мощности (сам
я, к сожалению, не люблю работу с паяльником). Я испытал регулятор оборотов электроинструмента
Я испытал регулятор оборотов электроинструмента
на TDA1085 на своей «болгарке». К счастью мой товарищ оказался хорошим
радиолюбителем и нашел некоторые неточности в этих схемах и исправил их.
Я не могу вам сейчас сказать что этот регулятор оборотов
коллекторных электродвигателей панацея, возможно, есть что-то и лучше я не
знаю. Как поведет она себя на высоких или даже средних оборотах, честно сказать
я не знаю( здесь уже
можно посмотреть тест этой платы в разных режимах). Эта схема отлично ведет
себя на низких оборотах, и вот уже целый год
отлично себя показывает на Самодельном лобзиковом станке ,
приводом там служит та самая «болгарка» на которой я испытывал регулятор оборотов.
Если Вы уже собрались делать себе регулятор оборотов,
давайте немного разберем его:
К клеммам «Фаза и Ноль» подключаем напряжение 220 Вольт
(фазировка не влияет на работу схемы), светодиод «HL» служит нам индикатором питания платы
регулятора оборотов, к клеммам « М1» подключаем наш электродвигатель,
«таходатчик» который выдает постоянный ток подключаем к «Х3» а если же у вас он
выдает переменный ток или импульсы, то к «Х2» (Как сделать таходатчик).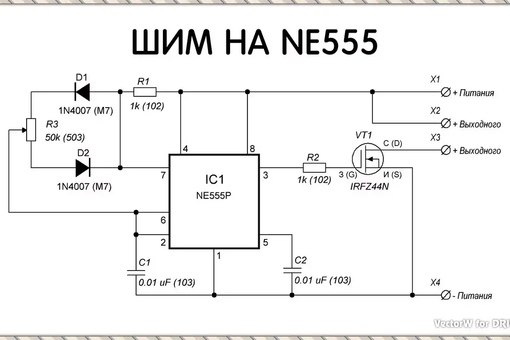
К контактам «Х4» можно подключить тумблер (выключатель) который будет отключать
наш двигатель, его ставить не обязательно, можно также отключать двигатель с
помощью регулятора оборотов «R1» который подключается к
контактам «Х1». У Bogdana на этой схеме не был указан конденсатор «С
100µF х25V»
хотя он присутствует на монтажной плате (забыл указать). Также у него в схеме
находится очень мощный симистор «ВТА41 800V» который подходит для управления
мощными коллекторными электродвигателями, а для нас подойдет совсем другой на
10…16 Ампер (по цене будет на много дешевле). Симистор должен обязательно
быть с радиатором (вся эта схема построена для управления этим симистором, который в
свою очередь управляет непосредственно нашим электродвигателем). Ниже симистора
на схеме указаны два мощных сопротивления «R31» и «R33»
рассчитанные на 0,1 Ом и мощностью 5 Ватт каждый. Под каждые электродвигатель
нужно индивидуально настраивать плату регулятора оборотов (как это сделать). Регулируется
схема с помощью подстрочных сопротивлений «R3» и «R21».
Построечный резистор «R3»
регулирует плавность пуска двигателя, а «R21» служит для быстроты реагирования на нагрузку электродвигателя
(в зависимости отнего схема будет реагировать плавно или резко на нагрузку).
Для лучшего удобства
я подготовил Вам список всех деталей, которые применяются в этом регуляторе
оборотов с поддержкой мощности («+» обозначены полярные конденсаторы):
20кОм | Пременное 1шт | |
20кОм | Подстроечное 1шт | R3 |
| 1,2кОм 0,25-0,125W | 3шт | R4;5;9 |
| 160кОм 0,25-0,125W | 2шт | R6;8 |
| 24 Ом 0,25-0,125W | 1шт | R7 |
| 1м 0,25-0,125W | 1шт | R10 |
| 120кОм 0,25-0,125W | 1шт | R11 |
| 47кОм 0,25-0,125W | 1шт | R12 |
| 470кОм 0,25-0,125W | 1шт | R13 |
| 220кОм 0,25-0,125W | 1шт | R14 |
| 51 Ом 0,25-0,125W | 4шт | R15;19;25;30 |
| 2,2кОм 0,25-0,125W | 2шт | R16;22 |
| 68кОм 0,25-0,125W | 1шт | R17 |
| 820 Ом 0,25-0,125W | 1шт | R18 |
| 2,7кОм 0,25-0,125W | 1шт | R20 |
10кОм | Подстроечное 1шт | R21 |
| 390кОм 0,25-0,125W | 4шт | R23;24;28;29 |
1шт | R26 | |
1шт | R27 | |
1шт | 32 | |
2шт | R31;33 | |
1шт | R34 | |
1шт | 35 | |
3шт | С1;5;неуказанный | |
3шт | C2;8;9 | |
3шт | С3;4;7 | |
820р | 1шт | С6 |
1шт | С10 | |
1шт | С11 | |
1шт | С12 | |
1шт | С13 | |
1шт | С14 | |
1шт | С15 | |
| 1шт Микросхема | МС1 | |
ВТА41 800V | 1шт Семистор | Т1 |
1шт стабилитрон | ||
1шт стабилитрон | ||
1шт диод | ||
1шт предохранитель | FU1 | |
На 3В | 1шт светодиод |
Изначально автор Bogdan на монтажной плате регулятора оборотов не указал буквенные
обозначения всех деталей, но благодаря моему товарищу (огромное ему спасибо) он
расставил все обозначения и исправил все неточности которые были у Bogdanа
ВНИМАНИЕ!!!
В расположении деталей ОШИБКА! Сопротивление R21
обозначено как R27. Будьте внимательны!
Будьте внимательны!
Ссылки для скачивания:
ОЧЕНЬ интересные видео по теме!!!
Агрессивные тесты.
Добавлено Анатолием:
Я думаю Александр не обидится если я в его теме выскажу несколько своих соображений.
Собрал уже не одну плату и могу сказать со сто процентной уверенностью. Если у кого то что то не работает, то проверяйте качество изготовления платы, качество и правильность монтажа, исправность элементов и двигателя. Все причины не работы (некорректной работы) кроются только в этом. Печатки и схемы выложенные в нете рабочие. Сам недавно столкнулся с подобным, две разные платы, а проявление неисправности одно и тоже.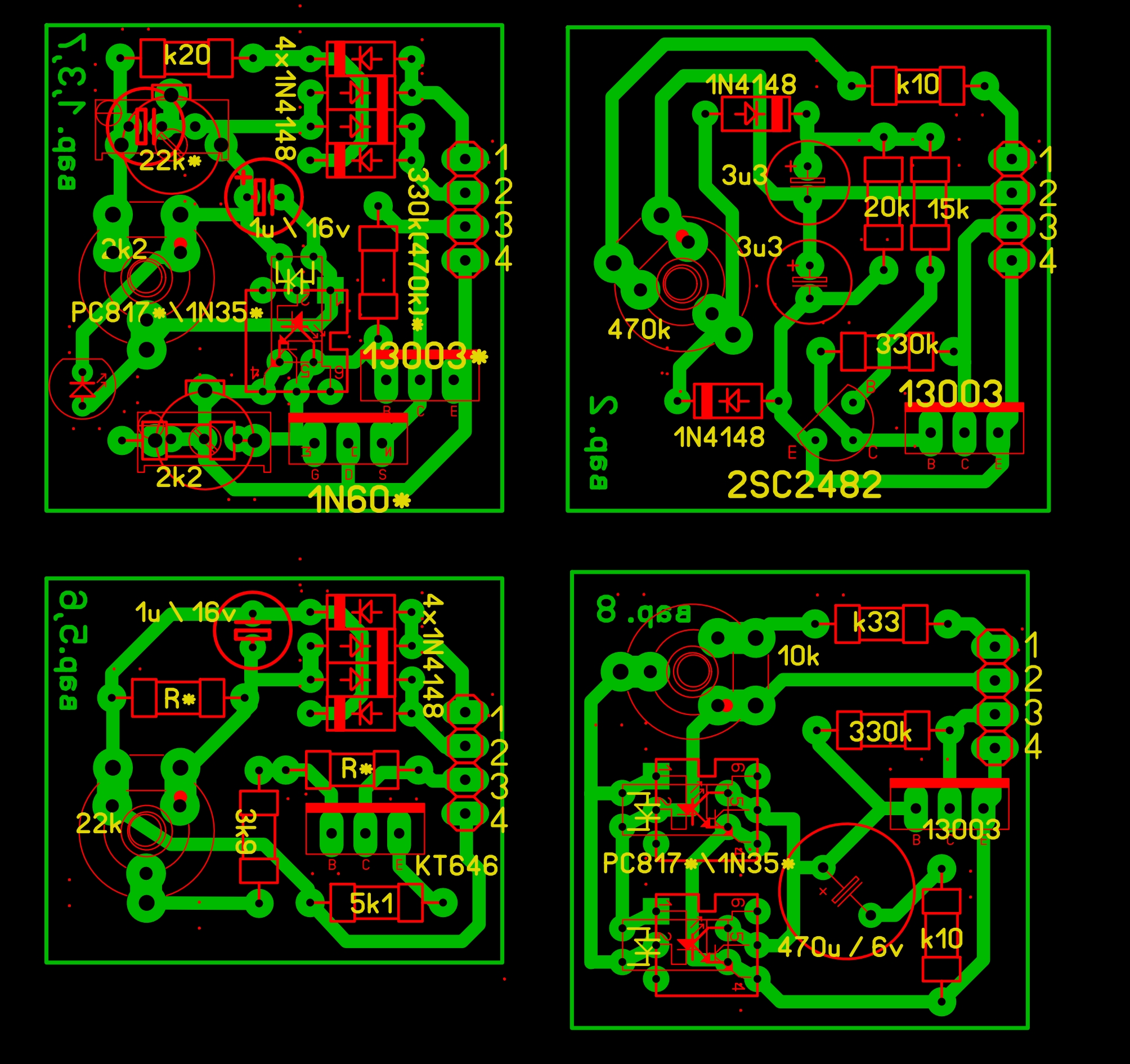 При включении и добавлении оборотов двигатель раскручивается рывками было ощущение как будто семистор работает на одном полупериоде. Оказалось на одной плате при травлении исчезла дорожка к конденсатору С10 на 47,0х16V, во втором случае этот же конденсатор был высохший.
При включении и добавлении оборотов двигатель раскручивается рывками было ощущение как будто семистор работает на одном полупериоде. Оказалось на одной плате при травлении исчезла дорожка к конденсатору С10 на 47,0х16V, во втором случае этот же конденсатор был высохший.
Попутно убедился, что если уменьшить С11 идущий на 14 ногу микросхемы до 22Н, то двигатель стартует, набирает максимальные обороты и обороты не регулируются. Поэтому с ним тоже нельзя ошибаться 47Н и точка.
Теперь по поводу замеров напряжения.
Я собираю платы с отдельным блоком питания, поэтому промеры даю для этого случая.
Исходные условия, к плате подключен двигатель с таходатчиком, регулятор оборотов в нулевом положении (минимум до конца), блок питания в розетку включён, 220В на плату не подаётся.
1-0,17В
2-0,17В
3-2,63В
4-0
5-0
6-2,4В
7-0,05В
8-0
9-14,65В
10-13,7В
11-12,83В
12-0,55В
13-0
14-11,34В
15-0,03В
16-0,03В
Условия те-же, но подключено 220В и регулятор стоит на небольших оборотах.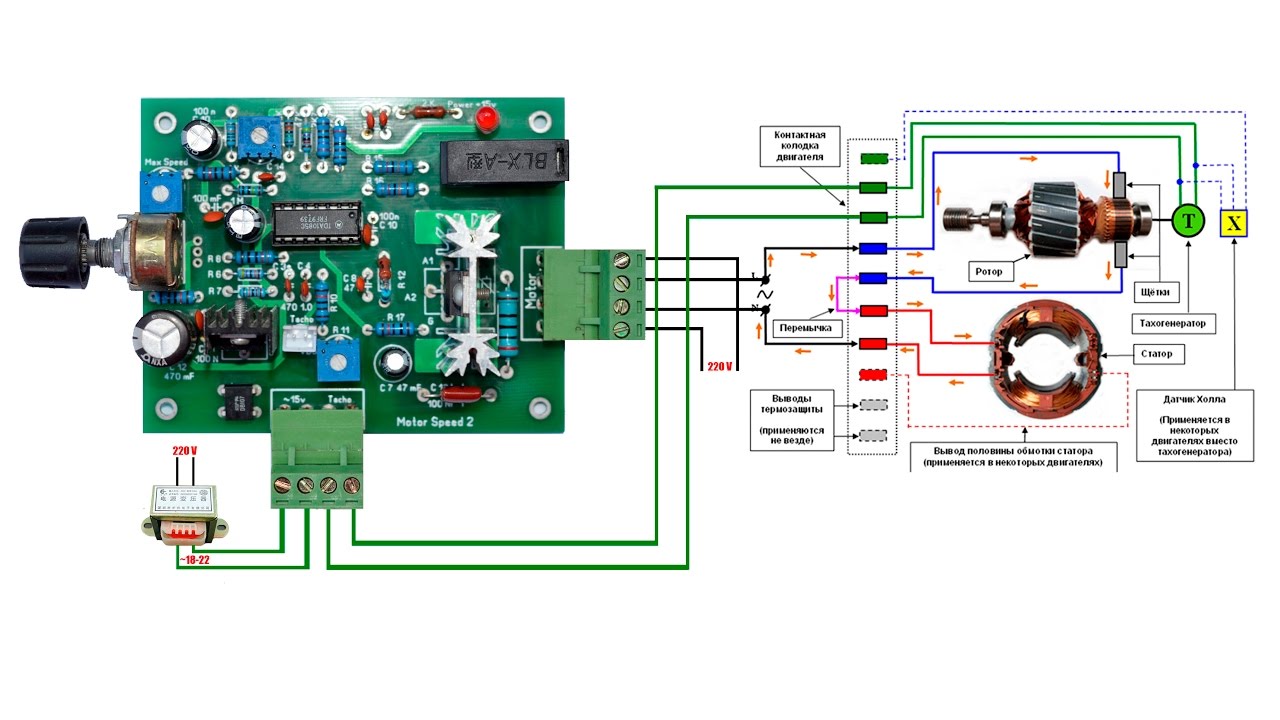 Двигатель медленно вращается.
Двигатель медленно вращается.
1-0,25В
2-0,3В
3-2,62В
4-0,55В
5-0,55В
6-2,4В
7-1,14В
8-0
9-14,2В
10-14,2В
11- не измеряется.
12-0,74В
13-0,69В
14-4,8В при касании щупом двигатель ускоряется.
15-0,73В
16-0,58В
Отличия могут быть но не очень большие. Напряжение на ноге 3 устанавливается регулятором R21.
Кроме этого советовал бы увеличить резистор R9 вместо 1,2 кОм ставить 20кОм. Этим уменьшается напряжение с таходатчика. И R17 вместо 68кОм ставить 27кОм. Ну и диод для защиты микросхемы само собой.
Пару слов по немецкой схеме. При правильной сборке, правильно выполненной печатке и исправных деталях всё работает без вопросов. Рекомендовал бы такую последовательность действий. Собрали плату, проверили сборку, микросхему не ставим. В панельку микросхемы подключаем на ноги 8-9 резистор 1,6кОм 1Вт, подключаем питание 220В, двигатель и таходатчик не подключен (это не принципиально), и меряем напряжение на подключённом резисторе. Должно быть 15-17В. Ставим микросхему, подключаем мотор и таходатчик и наслаждаемся работой. В немецкую схему советую внести следующее изменение. На регуляторе частоты вращения, на центральном отводе, запаять резистор 1,2кОм и второй конец этого резистора на клемму Х2-2, по семе. Боковую ногу регулятора которая раньше шла на центральный отвод, подключаем на корпус. Что это даёт. Раньше, при выведенном в ноль регуляторе, двигатель продолжал вращаться, теперь стоит как ему и положено. А методика настройки простая. Регулятор на ноль, включили, добавили немного оборотов, крутим Р1 пока обороты не станут красивыми на слух и визуально, обороты на максимум, крутим ограничение максимальных оборотов Р3, наслаждаемся своим мастерством.
Должно быть 15-17В. Ставим микросхему, подключаем мотор и таходатчик и наслаждаемся работой. В немецкую схему советую внести следующее изменение. На регуляторе частоты вращения, на центральном отводе, запаять резистор 1,2кОм и второй конец этого резистора на клемму Х2-2, по семе. Боковую ногу регулятора которая раньше шла на центральный отвод, подключаем на корпус. Что это даёт. Раньше, при выведенном в ноль регуляторе, двигатель продолжал вращаться, теперь стоит как ему и положено. А методика настройки простая. Регулятор на ноль, включили, добавили немного оборотов, крутим Р1 пока обороты не станут красивыми на слух и визуально, обороты на максимум, крутим ограничение максимальных оборотов Р3, наслаждаемся своим мастерством.
Регулятор оборотов электродвигателя без потери мощности
Плата регулировки оборотов коллекторных электродвигателей на микросхеме TDA1085, позволяет управлять двигателями без потери мощности.Обязательным условием при этом является наличие таходатчика (тахогенератор) на электродвигателе, который позволяет обеспечить обратную связь мотора с платой регулировки, а именно с микросхемой. Если говорить более простым языком, что бы было понятно всем, происходит примерно следующее. Мотор вращается с каким-то количеством оборотов, а установленный таходатчик на валу электромотора эти показания фиксирует. Если вы начинаете нагружать двигатель, частота вращения вала естественно начнет падать, что так же будет фиксировать таходатчик. Теперь рассмотрим дальше. Сигнал с этого таходатчика поступает на микросхему, она видит это и дает команду силовым элементам, добавить напряжение на электромотор.Таким образом, когда вы надавили на вал (даете нагрузку), плата автоматически прибавила напряжение и мощность на этом валу возросла. И наоборот, отпусти вал двигателя (сняли с него нагрузку), она увидела это и убавила напряжение. Таким образом обороты остаются не низменными, а момент силы (крутящий момент)постоянным. И самое что важное, вы можете регулировать частоту вращения ротора в широком диапазоне, что очень удобно в применении и конструировании различных устройств. Поэтому этот продукт, так и называется «Плата регулировки оборотов коллекторных двигателей без потери мощности».
Если говорить более простым языком, что бы было понятно всем, происходит примерно следующее. Мотор вращается с каким-то количеством оборотов, а установленный таходатчик на валу электромотора эти показания фиксирует. Если вы начинаете нагружать двигатель, частота вращения вала естественно начнет падать, что так же будет фиксировать таходатчик. Теперь рассмотрим дальше. Сигнал с этого таходатчика поступает на микросхему, она видит это и дает команду силовым элементам, добавить напряжение на электромотор.Таким образом, когда вы надавили на вал (даете нагрузку), плата автоматически прибавила напряжение и мощность на этом валу возросла. И наоборот, отпусти вал двигателя (сняли с него нагрузку), она увидела это и убавила напряжение. Таким образом обороты остаются не низменными, а момент силы (крутящий момент)постоянным. И самое что важное, вы можете регулировать частоту вращения ротора в широком диапазоне, что очень удобно в применении и конструировании различных устройств. Поэтому этот продукт, так и называется «Плата регулировки оборотов коллекторных двигателей без потери мощности».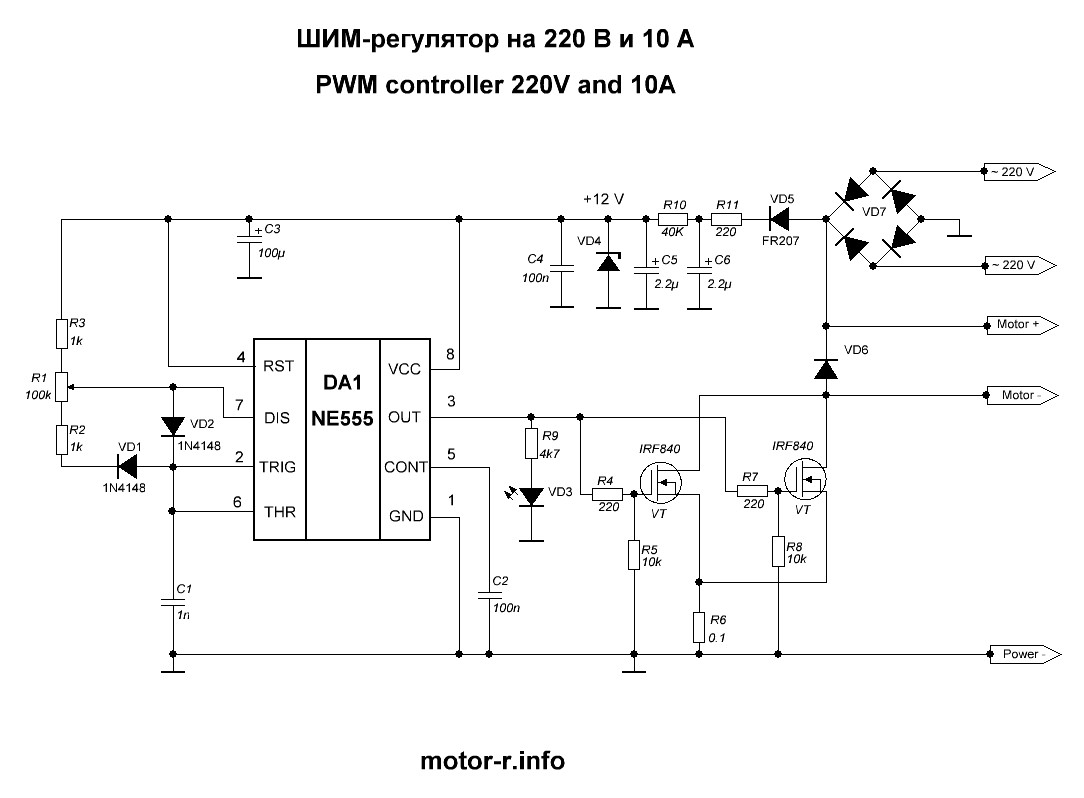
Но мы увидели одну особенность, что эта плата применима только для коллекторных электродвигателей (с электрическими щетками). Конечно такие моторы в быту встречаются намного реже чем асинхронные. Но они нашли широкое применение в стиральных машинах автомат. Вот именно по этому была изготовлена эта схема. Специально для электродвигателя от стиральной машины автомат. Их мощность достаточно приличная, от 200 до 800 ватт. Что позволяет достаточно широко применить их в быту.
Данный продукт, уже нашел широкое применение в хозяйстве людей и широко охватил лиц занимающихся различным хобби и профессиональной деятельностью.
Отвечая на вопрос — Куда можно применить двигатель от стиральной машины? Был сформирован некоторый список. Самодельный токарный станок по дереву; Гриндер; Электропривод для бетономешалки; Точило; Электропривод для медогонки; Соломорезка; Самодельный гончарный круг; Электрическая газонокосилка; Дровокол и много другое где необходимо механическое вращение каких либо механизмов или предметов.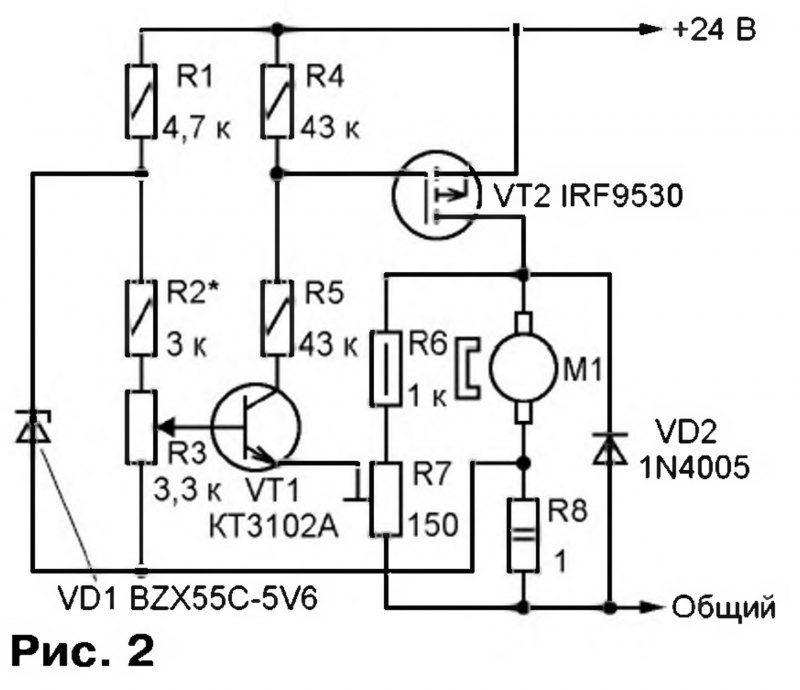 И во всех этих случаях нам помогает эта плата «Регулировки оборотов электродвигателей с поддержанием мощности на TDA1085».
И во всех этих случаях нам помогает эта плата «Регулировки оборотов электродвигателей с поддержанием мощности на TDA1085».
Краш-тест платы регулировки оборотов
3960 р.
Схема регулятора оборотов коллекторного двигателя 220В
Схема регулятора оборотов коллекторного двигателя 220в бывает двух типов стандартная и модифицированная. Все зависит непосредственно от регулятора, который вы используете.
Зачем они нужны
Множество бытовых приборов и электроинструментов не обходятся без коллекторного электродвигателя. Такая популярность подобного электродвигателя обусловлена универсальностью.
Для коллекторного электродвигателя может использование питание от тока постоянного или переменного напряжения. Дополнительным преимуществом является эффективный пусковой момент. При этом работа от постоянного или переменного тока электродвигателя сопровождается высокой частотой оборотом, что подходит далеко не всем пользователям.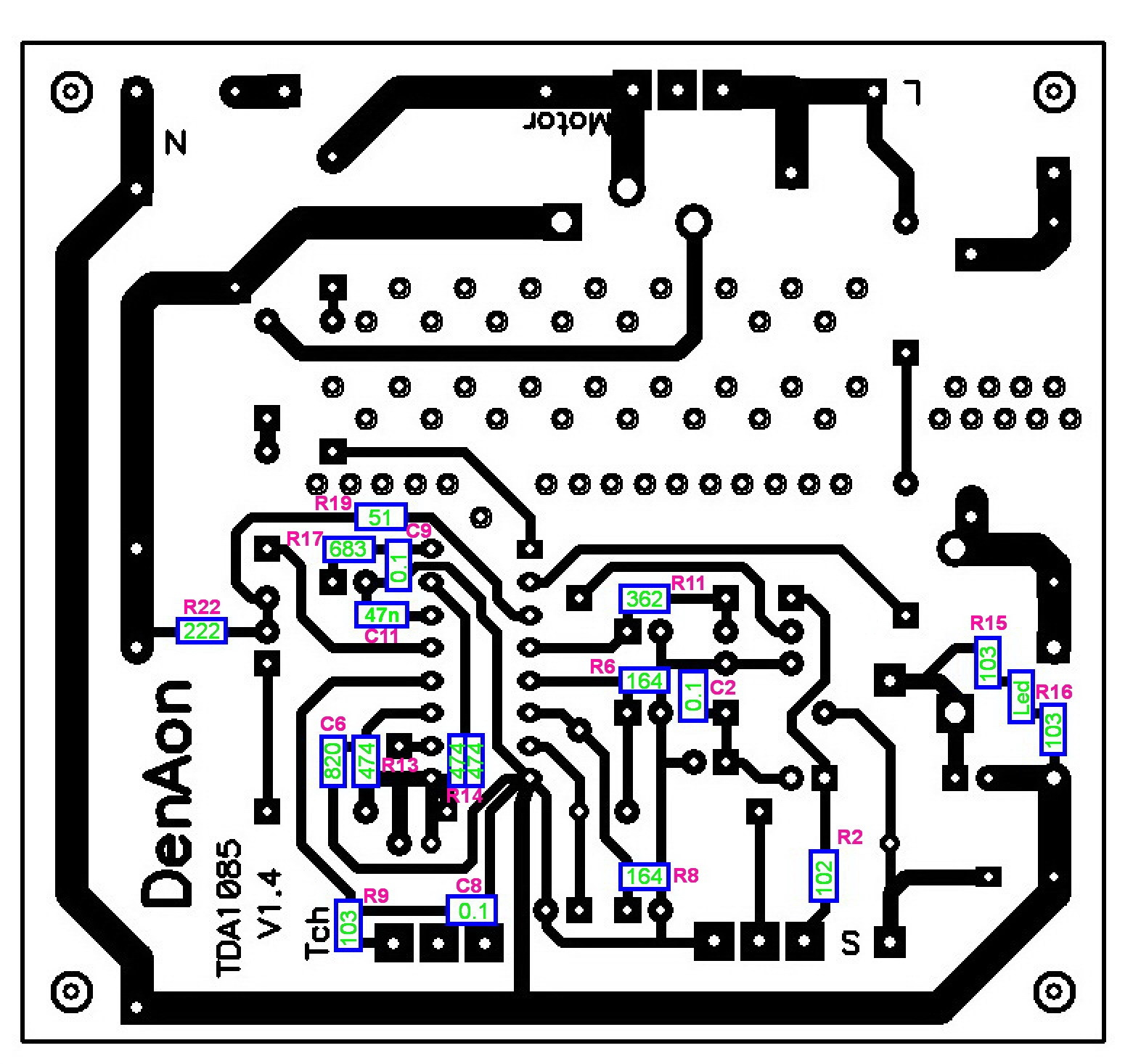 Чтобы обеспечить более плавный пуск и иметь возможность настраивать частоту вращения, используется регулятор оборотов. Простой регулятор вполне можно изготовить своими руками.
Чтобы обеспечить более плавный пуск и иметь возможность настраивать частоту вращения, используется регулятор оборотов. Простой регулятор вполне можно изготовить своими руками.
Но прежде чем будет обсуждаться схема, сначала нужно разобраться в коллекторных двигателях.
Коллекторные электродвигатели
Конструкция любого коллекторного двигателя включает несколько основных элементов:
- Коллектор,
- Щетки,
- Ротор,
- Статор.
Работа стандартного коллекторного электродвигателя основана на следующих принципах.
- Осуществляется подача тока от источника напряжения 220в. Именно 220 Вольт является стандартным напряжением бытовой сети. Для большинства приборов с электромоторами более 220 Вольт не требуется. Причем подача тока идет на ротор и статор, которые соединяются один с другим.
- В результате подачи тока от источника 220в образуется поле магнитное.
- Под воздействием магнитного напряжения начинается вращение ротора.
- Щетки осуществляют передачу напряжения непосредственно на ротор устройства. Причем щетки обычно изготавливают на основе графита.
- Когда направление тока в роторе или статоре меняется, вал вращается в обратную сторону.

Кроме стандартных коллекторных электродвигателей, существуют другие агрегаты:
- Электромотор последовательного возбуждения. Их устойчивость к перегрузкам более внушительная. Часто встречаются в бытовых электроприборах,
- Устройства параллельного возбуждения. У них сопротивление не отличается большими показателями, количество витков существенно больше, чем у аналогов,
- Однофазный электромотор. Его очень легко изготовить своими руками, мощность на приличном уровне, а вот коэффициент полезного действия оставляет желать лучшего.
Регуляторы оборотов
Теперь возвращаемся к теме регулятора оборотов. Все доступные сегодня схемы можно разделить на две большие категории:
Все доступные сегодня схемы можно разделить на две большие категории:
- Стандартная схема регулятора оборотов,
- Модифицированные устройства контроля оборотов.
Разберемся в особенностях схем подробнее.
Стандартные схемы
Стандартная схема регулятора коллекторного электромотора имеет несколько особенностей:
- Изготовить динистор не составит труда. Это важное преимущество устройства,
- Регулятор отличается высокой степенью надежности, что положительно сказывается в течение его периода эксплуатации,
- Позволяет комфортно для пользователя менять обороты двигателя,
- Большинство моделей основаны на тиристорном регуляторе.
Если вас интересует принцип работы, то такая схема выглядит довольно просто.
- Заряд тока от источника 220 Вольт идет к конденсатору.
- Далее идет напряжение пробоя динистора через переменный резистор.
- После этого происходит непосредственно сам пробой.
- Симистор открывается. Этот элемент несет ответственность за нагрузку.
- Чем выше окажется напряжение, чем чаще будет происходить открытие симистора.
- За счет подобного принципа работы происходит регулировка оборотов электродвигателя.
- Наибольшая доля подобных схем регулировки электродвигателя приходится на импортные бытовые пылесосы.
- Но при использовании стандартной схемы регулятора оборотов важно понимать, что он обратной связью не обладает. И если с нагрузкой произойдут изменения, обороты электродвигателя придется настраивать.
 Этот элемент несет ответственность за нагрузку.
Этот элемент несет ответственность за нагрузку.Модифицированная схема
Прогресс не стоит на месте. Несмотря на удовлетворительные характеристики стандартной схемы регулятора оборотов двигателя, усовершенствования никому еще не навредили.
Наиболее часто применяемыми схемами являются две:
- Реостатная. Из названия становится очевидно, что здесь основой выступает реостатная схема. Такие регуляторы высокоэффективные при смене количества оборотов электродвигателя. Высокие показатели эффективности объясняются использованием силовых транзисторов, отбирающих часть напряжения. Так меньшее количество тока из источника 220 Вольт поступает на двигатель, ему не приходится работать с большой нагрузкой. При этом схема имеет определенный недостаток большое количество выделяемого тепла. Чтобы регулятор работал длительное время, для электроинструмента потребуется активное постоянное охлаждение,
- Интегральная. Для работы интегрального устройства регулирования используется интегральный таймер, который отвечает за нагрузку на электродвигатель. Здесь могут быть задействованы всевозможные транзисторы. Это обусловлено наличием микросхемы в конструкции с большими параметрами выходного тока. При нагрузке менее 0,1 Ампер, все напряжение идет непосредственно на микросхему, обходя транзисторы. Чтобы регулятор работал эффективно, на затворе требуется наличие напряжения в 12 Вольт. Из этого вытекает, что электрическая цепь и напряжение питания обязаны отвечать данному диапазону.
 Высокие показатели эффективности объясняются использованием силовых транзисторов, отбирающих часть напряжения. Так меньшее количество тока из источника 220 Вольт поступает на двигатель, ему не приходится работать с большой нагрузкой. При этом схема имеет определенный недостаток большое количество выделяемого тепла. Чтобы регулятор работал длительное время, для электроинструмента потребуется активное постоянное охлаждение,
Высокие показатели эффективности объясняются использованием силовых транзисторов, отбирающих часть напряжения. Так меньшее количество тока из источника 220 Вольт поступает на двигатель, ему не приходится работать с большой нагрузкой. При этом схема имеет определенный недостаток большое количество выделяемого тепла. Чтобы регулятор работал длительное время, для электроинструмента потребуется активное постоянное охлаждение,
Простой самодельный регулятор
Если вы не хотите покупать готовый регулятор оборотов для двигателя, его вполне можно попробовать изготовить своими руками для контроля мощности устройства.
Это дополнительные навыки для вас и определенная экономия средств для кошелька.
Для изготовления регулятора вам потребуется:
- Набор проводков,
- Паяльник,
- Схема,
- Конденсаторы,
- Резисторы,
- Тиристор.
Монтажная схема будет выглядеть следующим образом.
Согласно представленной схеме, регулятор мощности и оборотов будет контролировать 1 полупериод. Расшифровывается она следующим образом.
- Питание от стандартной сети 220в поступает на конденсатор. 220 Вольт стандартный показатель бытовых розеток.
- Конденсатор, получив заряд, вступает в работу.
- Нагрузка переходит к нижнему кабелю и резисторам.
- Положительный контакт конденсатора соединяется с электродом тиристора.
- Идет один достаточный заряд напряжения.
- Второй полупроводник при этом открывается.
- Тиристор через себя пропускает полученную от конденсатора нагрузку.
- Происходит разряжение конденсатора, и полупериод вновь повторяется.

При большой мощности электродвигателя, питающегося от постоянного или переменного тока, регулятор дает возможность применять агрегат более экономично.
Самодельные регуляторы оборотов имеют полное право на свое существование. Но когда речь заходит о необходимости использовать регулятор электродвигателя для более серьезного оборудования, рекомендуется купить готовое устройство. Пусть оно обойдется дороже, но вы будете уверены в работоспособности и надежности агрегата.
Лучшие и важные методы контроля
В период 18 -го и -го века произошла эволюция двигателей постоянного тока. Развитие двигателей постоянного тока значительно расширилось, и они находят широкое применение во многих отраслях промышленности.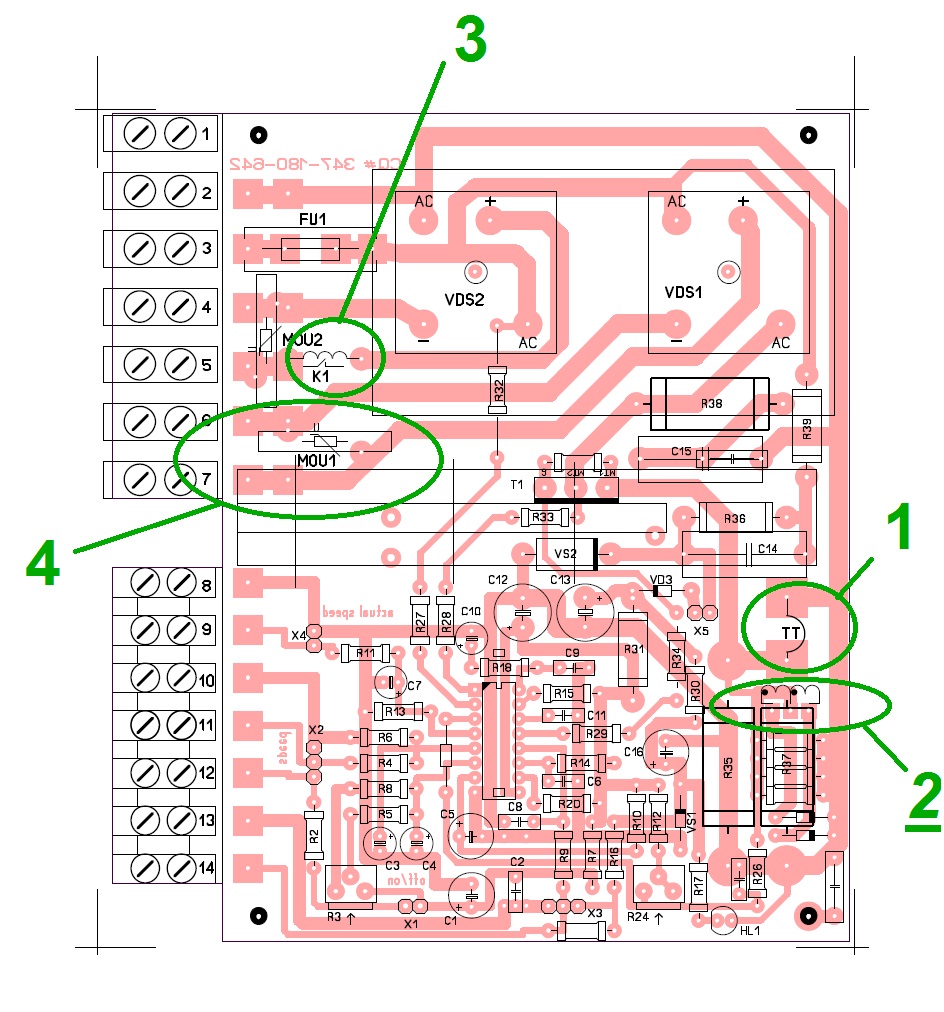 В начале 1800-х годов и с усовершенствованиями, сделанными в 1832 году, двигатели постоянного тока были первоначально разработаны британским исследователем Стердженом. Он изобрел начальный коммутаторный двигатель постоянного тока, в котором он также может моделировать механизмы.Но можно задаться вопросом, каковы функциональные возможности двигателя постоянного тока и почему важно знать об управлении скоростью двигателя постоянного тока. Итак, эта статья четко объясняет его работу и различные методы контроля скорости.
В начале 1800-х годов и с усовершенствованиями, сделанными в 1832 году, двигатели постоянного тока были первоначально разработаны британским исследователем Стердженом. Он изобрел начальный коммутаторный двигатель постоянного тока, в котором он также может моделировать механизмы.Но можно задаться вопросом, каковы функциональные возможности двигателя постоянного тока и почему важно знать об управлении скоростью двигателя постоянного тока. Итак, эта статья четко объясняет его работу и различные методы контроля скорости.
Что такое двигатель постоянного тока?
Двигатель постоянного тока работает от постоянного тока, преобразуя полученную электрическую энергию в механическую. Это вызывает изменение вращения в самом устройстве, таким образом обеспечивая питание для работы различных приложений в нескольких областях.
Регулировка скорости двигателя постоянного тока — одна из наиболее полезных функций двигателя. Контролируя скорость двигателя, вы можете изменять скорость двигателя в соответствии с требованиями и получать необходимую работу.
Механизм управления скоростью применим во многих случаях, например, для управления движением роботизированных транспортных средств, движением двигателей на бумажных фабриках и движением двигателей в лифтах, где используются различные типы двигателей постоянного тока.
Принцип работы двигателя постоянного тока
Простой двигатель постоянного тока работает по принципу: когда токопроводящий проводник помещается в магнитное поле, на него действует механическая сила.В практическом двигателе постоянного тока якорь является проводником по току, а поле создает магнитное поле.
Когда на проводник (якорь) подается ток, он создает собственный магнитный поток. Магнитный поток либо суммируется с магнитным потоком, создаваемым обмотками возбуждения в одном направлении, либо нейтрализует магнитный поток, обусловленный обмотками возбуждения. Накопление магнитного потока в одном направлении по сравнению с другим оказывает давление на проводник, и поэтому он начинает вращаться.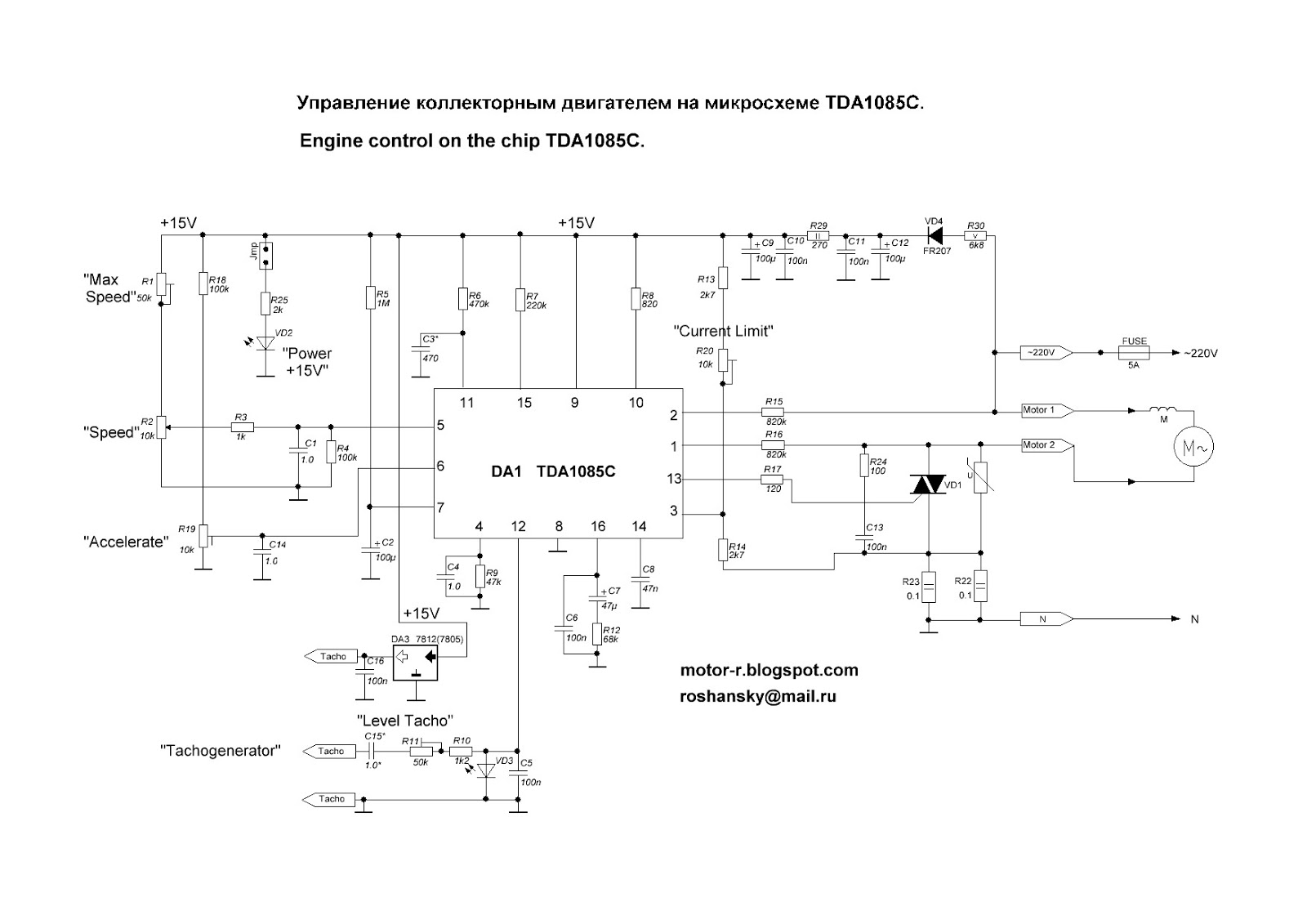
Согласно закону электромагнитной индукции Фарадея вращательное действие проводника создает ЭДС. Эта ЭДС, согласно закону Ленца, имеет тенденцию противодействовать причине, то есть подаваемому напряжению. Таким образом, двигатель постоянного тока имеет особую характеристику регулирования крутящего момента в случае изменения нагрузки из-за обратной ЭДС.
Почему важно регулировать скорость двигателя постоянного тока?
Контроль скорости в машине показывает влияние на скорость вращения двигателя, где это прямое влияние на функциональность машины и так важно для производительности и результатов работы.Во время сверления каждый материал имеет свою собственную скорость вращения, которая также меняется в зависимости от размера сверла.
В сценарии насосных установок будет изменение производительности, поэтому конвейерная лента должна быть синхронизирована с функциональной скоростью устройства. Эти факторы прямо или косвенно зависят от скорости двигателя. Из-за этого следует учитывать скорость двигателя постоянного тока и соблюдать различные типы методов управления скоростью.
Управление скоростью двигателя постоянного тока осуществляется либо вручную рабочим, либо с помощью любого автоматического управляющего инструмента.Это, по-видимому, контрастирует с ограничением скорости, при котором необходимо регулирование скорости, препятствующее естественному изменению скорости из-за изменения нагрузки на вал.
Принцип управления скоростью
Из приведенного выше рисунка уравнение напряжения для простого двигателя постоянного тока:
В = Eb + IaRa
В — подаваемое напряжение, Eb — обратная ЭДС, Ia — якорь. ток, Ra — сопротивление якоря.
Мы уже знаем, что
Eb = (PøNZ) / 60A.
P — количество полюсов,
A — постоянное
Z — количество проводников
N — скорость двигателя
Подставляя значение Eb в уравнение напряжения, получаем
V = ( (PøNZ) / 60A) + IaRa
Или, V — IaRa = (PøNZ) / 60A
т.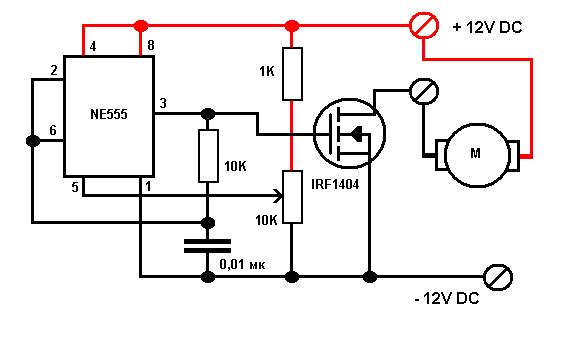 е. N = (PZ / 60A) (V — IaRa) / ø
е. N = (PZ / 60A) (V — IaRa) / ø
. записывается как:
N = K (V — IaRa) / ø, K — постоянная величина
Это подразумевает три вещи:
- Скорость двигателя прямо пропорциональна напряжению питания.
- Скорость двигателя обратно пропорциональна падению напряжения якоря.
- Скорость двигателя обратно пропорциональна потоку из-за результатов поля.
Таким образом, скорость двигателя постоянного тока можно контролировать тремя способами:
- Изменяя напряжение питания
- Изменяя поток, и изменяя ток через обмотку возбуждения
- Изменяя напряжение якоря и изменяя сопротивление якоря
Множественные методы управления скоростью двигателя постоянного тока
Поскольку существует два типа двигателей постоянного тока, здесь мы четко обсудим методы управления скоростью как последовательных, так и параллельных двигателей постоянного тока.
Управление скоростью двигателя постоянного тока серийных типов
Его можно разделить на два типа, а именно:
- Техника с управлением якорем
- Техника с полевым управлением
Техника с управлением якорем далее подразделяется на три типа
- Якорь контролируемое сопротивление
- Управление шунтированным якорем
- Напряжение на клеммах якоря
Управляемое сопротивление якоря
Этот метод наиболее широко используется там, где регулирующее сопротивление последовательно соединено с сопротивлением источника питания двигателя. Изображение ниже объясняет это.
Изображение ниже объясняет это.
Контроль сопротивления якоря
Потери мощности, которые происходят в управляющем сопротивлении двигателя постоянного тока, можно игнорировать, потому что этот метод регулирования в основном используется в течение длительного периода времени для снижения скорости во время сценариев легкой нагрузки. Это рентабельный метод получения постоянного крутящего момента, который в основном применяется в приводных кранах, поездах и других транспортных средствах.
Управление шунтированным якорем
Здесь реостат будет иметь как последовательное, так и шунтирующее соединение с якорем.Будет изменяться уровень напряжения, подаваемого на якорь, и это зависит от изменения последовательного реостата. Тогда как изменение тока возбуждения происходит за счет смены шунтирующего реостата. Этот метод управления скоростью в двигателе постоянного тока не так дорог из-за значительных потерь мощности в сопротивлениях регулирования скорости. Скорость можно до некоторой степени регулировать, но не выше нормального уровня.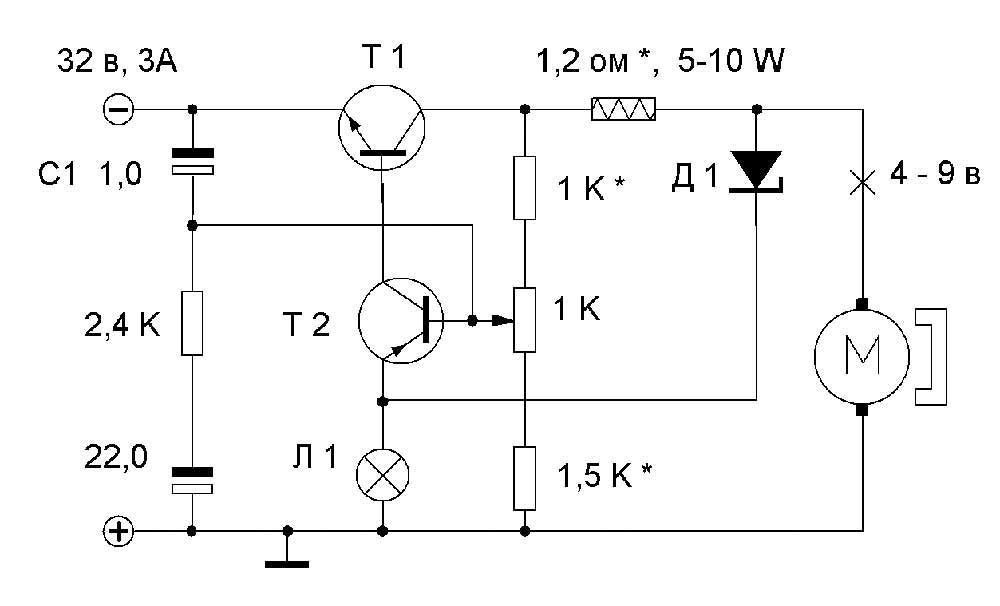
Метод управления скоростью двигателя постоянного тока с шунтированным якорем
Напряжение на клеммах якоря
Скорость двигателя постоянного тока также может быть достигнута путем подачи питания на двигатель с использованием индивидуального переменного напряжения питания, но этот подход является дорогостоящим и широко не применяется.
Техника, управляемая полем, далее подразделяется на два типа:
- Полевой дивертер
- Управление задействованным полем (управление полевым полем)
Техника полевого дивертора
В этом методе используется дивертор. Интенсивность магнитного потока, проходящего через поле, может быть уменьшена путем шунтирования некоторой части тока двигателя через последовательное поле. Чем меньше сопротивление дивертора, тем меньше ток возбуждения. Этот метод используется не только для нормального диапазона скоростей, но и для электрических приводов, где скорость увеличивается при уменьшении нагрузки.
Регулировка скорости двигателя постоянного тока с дивертором возбуждения
Управление отводным полем
Здесь также, с уменьшением магнитного потока, скорость будет увеличиваться, и это достигается за счет уменьшения количества витков обмотки возбуждения, откуда протекает ток.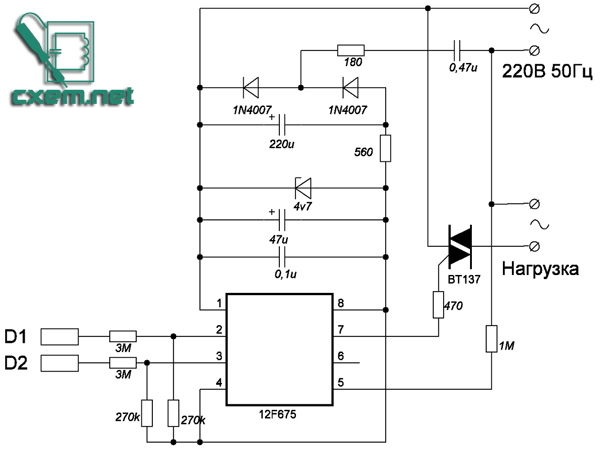 Здесь убирается количество ответвлений в обмотке возбуждения, и этот прием используется в электрических тягах.
Здесь убирается количество ответвлений в обмотке возбуждения, и этот прием используется в электрических тягах.
Управление скоростью параллельного двигателя постоянного тока
Его можно разделить на два типа:
- Метод управления полем
- Метод управления якорем
Метод управления полем шунтирующего двигателя постоянного тока
В этом методе магнитный магнитный поток, создаваемый обмотками возбуждения, изменяется для изменения скорости двигателя.
Поскольку магнитный поток зависит от тока, протекающего через обмотку возбуждения, его можно изменять, изменяя ток через обмотку возбуждения. Это может быть достигнуто путем использования переменного резистора последовательно с резистором обмотки возбуждения.
Первоначально, когда переменный резистор находится в минимальном положении, номинальный ток течет через обмотку возбуждения из-за номинального напряжения питания, и в результате скорость остается нормальной. При постепенном увеличении сопротивления ток через обмотку возбуждения уменьшается. Это, в свою очередь, снижает создаваемый поток. Таким образом, скорость двигателя увеличивается сверх своего нормального значения.
Это, в свою очередь, снижает создаваемый поток. Таким образом, скорость двигателя увеличивается сверх своего нормального значения.
Метод управления сопротивлением якоря для шунтирующего двигателя постоянного тока
С помощью этого метода можно управлять скоростью двигателя постоянного тока, управляя сопротивлением якоря для управления падением напряжения на якоре. В этом методе также используется переменный резистор, включенный последовательно с якорем.
Когда переменный резистор достигает минимального значения, сопротивление якоря становится нормальным, и, следовательно, напряжение якоря падает.Когда значение сопротивления постепенно увеличивается, напряжение на якоре уменьшается. Это, в свою очередь, приводит к снижению скорости двигателя.
С помощью этого метода достигается скорость двигателя ниже его нормального диапазона.
Метод управления напряжением якоря для параллельного двигателя постоянного тока (метод Уорда Леонарда)
Метод Уорда Леонарда для схемы управления скоростью двигателя постоянного тока показан следующим образом:
На приведенном выше рисунке M — это главный двигатель, скорость которого равна должен регулироваться, а G соответствует индивидуально возбужденному генератору постоянного тока, который приводится в действие трехфазным двигателем и может быть синхронным или асинхронным.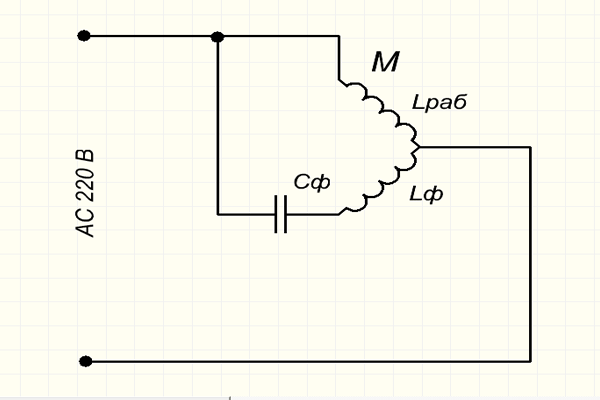 Эта комбинация генератора постоянного тока и двигателя переменного тока называется набором M-G.
Эта комбинация генератора постоянного тока и двигателя переменного тока называется набором M-G.
Напряжение генератора изменяется путем изменения тока возбуждения генератора. Этот уровень напряжения, когда он подается на секцию якоря двигателя постоянного тока, а затем M изменяется. Чтобы поддерживать постоянным поток поля двигателя, ток возбуждения двигателя должен поддерживаться постоянным. Когда скорость двигателя регулируется, ток якоря двигателя должен быть таким же, как и номинальный уровень.
Поставляемый ток возбуждения будет другим, так что уровень напряжения якоря изменяется от «0» до номинального уровня. Поскольку регулирование скорости соответствует номинальному току и постоянному потоку поля двигателя и потоку поля до достижения номинальной скорости. И поскольку мощность является произведением скорости и крутящего момента, она прямо пропорциональна скорости. При этом при увеличении мощности скорость увеличивается.
Оба вышеупомянутых метода не могут обеспечить регулирование скорости в желаемом диапазоне.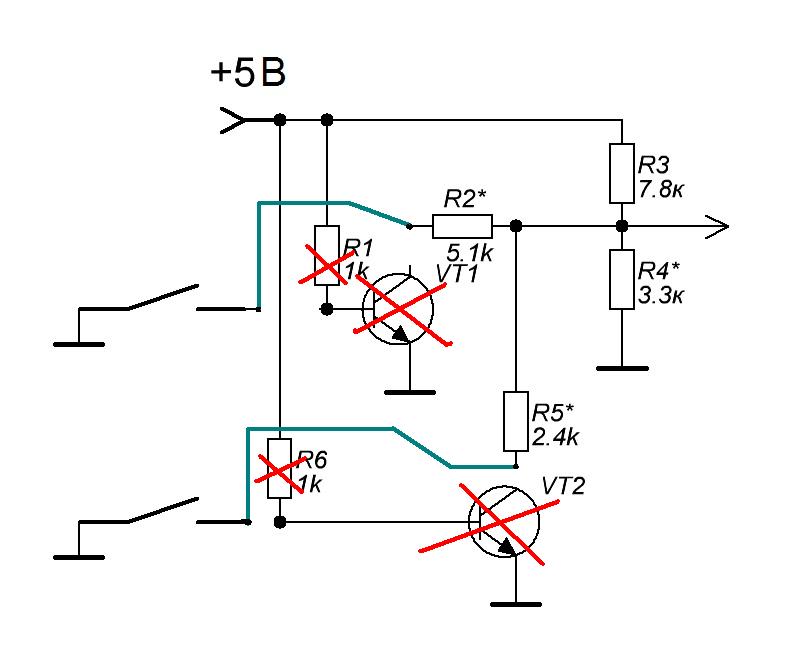 Более того, метод управления потоком может повлиять на коммутацию, тогда как метод управления якорем включает огромные потери мощности из-за использования резистора, включенного последовательно с якорем. Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
Более того, метод управления потоком может повлиять на коммутацию, тогда как метод управления якорем включает огромные потери мощности из-за использования резистора, включенного последовательно с якорем. Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
Следовательно, с помощью метода Уорда Леонарда регулируемый силовой привод и постоянное значение крутящего момента достигаются от минимального уровня скорости до уровня базовой скорости. Техника регулирования потока поля в основном используется, когда уровень скорости больше, чем базовая скорость.
Здесь, в функциональности, ток якоря поддерживается на постоянном уровне при заданном значении, а значение напряжения генератора поддерживается на постоянном уровне. В таком методе обмотка возбуждения получает фиксированное напряжение, а якорь — переменное напряжение.
Один из таких методов управления напряжением включает использование механизма распределительного устройства для подачи переменного напряжения на якорь, а другой использует генератор переменного тока с приводом от двигателя для подачи переменного напряжения на якорь (система Уорда-Леонарда). .
.
Преимущества и недостатки методики Уорда Леонарда d:
Преимущества использования техники Уорда Леонарда для управления скоростью двигателя постоянного тока следующие:
- В обоих направлениях можно управлять скоростью устройства. плавно для расширенного диапазона
- Этот метод обладает внутренней тормозной способностью
- Задние реактивные вольт-амперы уравновешиваются посредством привода, а синхронный двигатель с сильным возбуждением действует как привод, поэтому будет происходить приращение коэффициента мощности
- Когда есть импульсная нагрузка, приводным двигателем является асинхронный двигатель, имеющий маховик, который используется для уменьшения мгновенной нагрузки до минимального уровня.
Недостатки метода Уорда Леонарда:
- As, поскольку этот метод имеет комплект двигателя и генератора, стоимость больше
- Устройство сложное по конструкции и имеет большой вес
- Требуется больше места e для установки
- Требуется регулярное техническое обслуживание, фундамент не рентабелен
- Будут огромные потери, поэтому эффективность системы снизится
- Произойдет больше шума
И применение метода Уорда Леонарда плавное регулирование скорости в двигателе постоянного тока. Некоторые из примеров — шахтные подъемники, бумажные фабрики, подъемники, прокатные станы и краны.
Некоторые из примеров — шахтные подъемники, бумажные фабрики, подъемники, прокатные станы и краны.
Помимо этих двух методов, наиболее широко используемым является управление скоростью двигателя постоянного тока с использованием ШИМ для управления скоростью двигателя постоянного тока. ШИМ включает в себя приложение импульсов переменной ширины к драйверу двигателя для управления напряжением, подаваемым на двигатель. Этот метод оказался очень эффективным, поскольку потери мощности сведены к минимуму, и он не требует использования какого-либо сложного оборудования.
Метод управления напряжением
На приведенной выше блок-схеме представлен простой регулятор скорости электродвигателя. Как показано на приведенной выше блок-схеме, микроконтроллер используется для подачи сигналов ШИМ на драйвер двигателя. Драйвер двигателя представляет собой микросхему L293D, которая состоит из H-мостовых схем для управления двигателем.
ШИМ достигается путем изменения импульсов, подаваемых на разрешающий вывод микросхемы драйвера двигателя, для управления приложенным напряжением двигателя.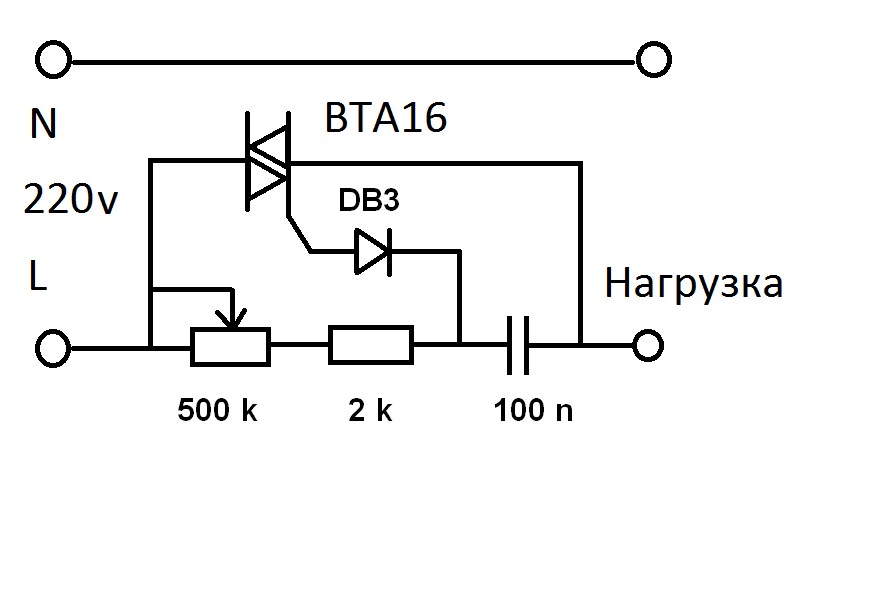 Изменение импульсов осуществляется микроконтроллером с входным сигналом от кнопок.Здесь предусмотрены две кнопки, каждая для уменьшения и увеличения рабочего цикла импульсов.
Изменение импульсов осуществляется микроконтроллером с входным сигналом от кнопок.Здесь предусмотрены две кнопки, каждая для уменьшения и увеличения рабочего цикла импульсов.
Итак, в этой статье дается подробное объяснение различных методов управления скоростью двигателя постоянного тока и того, как регулирование скорости наиболее важно соблюдать. Кроме того, рекомендуется знать о контроллере скорости двигателя 12 В постоянного тока.
Все о контроллерах двигателей постоянного тока
Двигатели постоянного тока по-прежнему актуальны в современной промышленности, даже несмотря на то, что они являются одной из старейших конструкций электродвигателей.Как они выдержали испытание временем, особенно против всех удивительных новых машин 21 века?
Есть много потенциальных ответов на этот вопрос, но их хорошая управляемость — основная причина того, что двигатели постоянного тока сохранились. Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его провода. Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают адекватную производительность при их стоимости.В этой статье мы рассмотрим некоторые распространенные контроллеры двигателей постоянного тока, как они работают, и обсудим, какие приложения наиболее популярны для этих систем.
Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают адекватную производительность при их стоимости.В этой статье мы рассмотрим некоторые распространенные контроллеры двигателей постоянного тока, как они работают, и обсудим, какие приложения наиболее популярны для этих систем.
Что такое контроллеры двигателей постоянного тока?
Проще говоря, контроллер двигателя постоянного тока — это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока. Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам устанавливать желаемое поведение двигателя, даже если их механизмы для этого различаются.
Наши статьи о параллельных двигателях постоянного тока, двигателях постоянного тока с последовательной обмоткой и бесщеточных двигателях постоянного тока содержат подробные объяснения того, как работают машины постоянного тока. Подводя итог, можно сказать, что кривая скорость / крутящий момент двигателей постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя. Это позволяет упростить управление, так как снижение скорости приведет к увеличению крутящего момента, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсируются путем простого переключения их проводов, так что постоянный ток течет в противоположном направлении.Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Типы контроллеров двигателей постоянного тока
Ниже приведены некоторые распространенные методы управления двигателем постоянного тока. Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять разными способами, включая контроллеры серводвигателей (подробнее см. В нашей статье о контроллерах серводвигателей):
Контроллер направления: H-мост
Н-мостовая схема — один из простейших методов управления двигателем постоянного тока.На рисунке 1 ниже показана упрощенная принципиальная схема H-моста:
.
Рисунок 1: Н-мостовая схема для управления направлением двигателя постоянного тока.
Четыре переключателя управляются парами (1 и 4, 2 и 3), и когда любая из этих пар замыкается, они замыкают цепь и приводят двигатель в действие. Следовательно, четырехквадрантный двигатель может быть создан путем соединения определенных переключателей вместе, при этом изменение полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который по команде меняет направление вращения на обратное.Они легко продаются в виде микросхем и могут быть найдены в большинстве контроллеров на основе микропроцессоров, поскольку H-мост может быть уменьшен с помощью транзисторов до очень малых размеров.
Н-мосты не только могут изменять направление вращения двигателя, но также могут использоваться для регулирования скорости. Если требуется только направленное управление, тогда H-мост будет использоваться в качестве так называемого безрегенеративного привода постоянного тока. Однако создание рекуперативных приводов постоянного тока может быть усложнено. На рисунке 2 показан график, показывающий, как работают рекуперативные приводы:
Рис. 2: графики, представляющие направление скорости и крутящего момента при изменении полярности двигателя постоянного тока.Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается разрыв, когда они находятся в оппозиции.
Большинство двигателей постоянного тока замедляются за счет отключения питания двигателя; Рекуперативные приводы включают возможность торможения, когда переключение полярностей во время работы двигателя вызывает замедление. Квадранты 1 и 3 считаются «автомобильными» квадрантами, где двигатель обеспечивает ускорение в любом направлении, и это то, что контролируют нерегенеративные приводы.Квадранты 2 и 4 считаются «тормозными» квадрантами, в которых двигатель замедляется, и от этого выигрывают рекуперативные приводы. Когда скорость двигателя противоположна крутящему моменту двигателя, двигатель становится генератором, в котором его механическая энергия направляет ток обратно к источнику питания (известное как «рекуперативное торможение»). Эта функция снижает потери энергии и может подзаряжать источник питания, эффективно увеличивая КПД двигателя. На рисунке 3 показана упрощенная принципиальная схема для каждого квадранта и показано, как квадранты 2 и 4 отправляют ток обратно в источник для регенерации энергии:
Рисунок 3: Принципиальные схемы для каждого квадранта, показывающие величины напряжения двигателя и напряжения питания.Обратите внимание, как направление тока (I
a ) перемещается от двигателя к источнику питания в квадрантах 2 и 4.
Когда двигатель замедляется, E a (напряжение, создаваемое / используемое двигателем) больше, чем напряжение питания (V a ), и ток будет течь обратно в источник питания. В настоящее время изучается регенеративное торможение в электромобилях и других приложениях, требующих максимальной эффективности. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
PWM может использоваться во многих типах двигателей, как показано в нашей статье о контроллерах двигателей переменного тока. По сути, схемы ШИМ изменяют скорость двигателя, моделируя уменьшение / увеличение напряжения питания. Контроллеры привода с регулируемой скоростью отправляют на двигатель периодические импульсы, которые в сочетании с эффектом сглаживания, вызванным индуктивностью катушки, заставляют двигатель работать так, как если бы он питался от более низкого / более высокого напряжения. Например, если на двигатель 12 В подается сигнал ШИМ, высокий (12 В) в течение двух третей каждого периода и низкий (0 В) в остальное время, двигатель будет эффективно работать при двух третях полного напряжения, или 8 В.Следовательно, процент снижения напряжения или «рабочий цикл» ШИМ изменяет скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет практически непрерывно контролировать скорость двигателя. ШИМ часто сочетается с Н-мостами, чтобы обеспечить управление скоростью, направлением и торможением.
Контроллер якоря: переменное сопротивление
Другой способ повлиять на скорость двигателя постоянного тока — это изменить ток, протекающий через катушку возбуждения или через якорь.Скорость выходного вала будет изменяться при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (продиктованного током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличивать сопротивление катушки якоря для уменьшения скорости или увеличивать сопротивление статора, чтобы увеличить ее, и все это путем регулирования сопротивления. Обратите внимание, что этот метод приводит к неэффективности двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на тепло, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Заявки и критерии отбора
При рассмотрении вопроса о покупке контроллера двигателя постоянного тока есть несколько ключевых вопросов, на которые следует ответить либо вашему исследованию, либо поставщику. Контроллеры двигателей постоянного тока сложно указать из-за их разнообразия, поэтому приведенный ниже список вопросов станет надежным инструментом при выборе контроллера для вашего проекта. Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и используйте эти вопросы, чтобы сделать осознанный выбор:
- Каков диапазон номинального напряжения используемого двигателя и какие части этого диапазона он будет использовать?
- Какой тип управления желателен (скорость, крутящий момент, направление или все три)?
- Какой тип двигателя контролируется?
- Какой длительный ток может подавать контроллер и соответствует ли он длительному потреблению тока двигателем под нагрузкой?
- Есть ли в системе встроенная максимальная токовая / тепловая защита?
- Какой будет метод управления при использовании микропроцессорных приводов (ШИМ, ПДУ, аналоговое напряжение и т. Д.))? Программное обеспечение необходимо?
- Вам нужен контроллер с двумя двигателями (один контроллер для двух независимых двигателей)?
Контроллеров двигателей постоянного тока доступно столько же, сколько самих двигателей постоянного тока; их изменчивость — одно из их сильнейших преимуществ. Их приложения также многочисленны, поскольку большинство разработчиков извлекают выгоду из какого-либо пользовательского ввода в их двигатель постоянного тока. В сферах робототехники, производства, военных приложений, автомобилей и многих других используются контроллеры двигателей постоянного тока с отличными результатами.В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут предоставлять простые средства управления с хорошей точностью по приемлемой цене.
Сводка
В этой статье представлено понимание того, что такое контроллеры двигателей постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- http: // srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30.pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- https://www.ece.uvic.ca
- https://www.tigoe.com/pcomp/code/circuits/motors/controlling-dc-motors/
- https://www.elprocus.com/what-are-the-best-ways-to-control-the-speed-of-dc-motor/
- https://www.robotshop.com/community/tutorials/show/how-to-make-a-robot-lesson-5-choosing-a-motor-controller
Прочие изделия из двигателей
Больше от Instruments & Controls
Зачем и как контролировать скорость вращения вентилятора для охлаждения электронного оборудования
Введение
Растет интерес к интегральным схемам для управления скоростью охлаждающих вентиляторов в персональных компьютерах и другом электронном оборудовании.Компактные электрические вентиляторы дешевы и используются для охлаждения электронного оборудования более полувека. Однако в последние годы технология использования этих вентиляторов значительно изменилась. Эта статья расскажет, как и почему произошла эта эволюция, и предложит некоторые полезные подходы для дизайнера.
Производство и отвод тепла
В электронике, особенно в бытовой электронике, наблюдается тенденция к уменьшению размеров изделий с улучшенными комбинациями функций.Следовательно, многие электронные компоненты превращаются в очень маленькие форм-факторы. Наглядный пример — ноутбук. Тонкие и «облегченные» ноутбуки значительно сократились, но их вычислительная мощность сохранилась или увеличилась. Другие примеры этой тенденции включают проекционные системы и телевизионные приставки. Что общего у всех этих систем, помимо значительно меньшего — и все еще уменьшающегося — размера, так это то, что количество тепла, которое они должны рассеивать, не уменьшается; часто увеличивается! В портативном ПК большая часть тепла генерируется процессором; в проекторе большая часть тепла генерируется источником света.Это тепло нужно отводить тихо и эффективно.
Самый тихий способ отвода тепла — использование пассивных компонентов, таких как радиаторы и тепловые трубки. Однако во многих популярных продуктах бытовой электроники этого оказалось недостаточно — к тому же они довольно дороги. Хорошей альтернативой является активное охлаждение, введение вентилятора в систему для создания воздушного потока вокруг корпуса и тепловыделяющих компонентов, эффективного отвода тепла из системы. Однако вентилятор является источником шума.Это также дополнительный источник энергопотребления в системе — очень важное соображение, если питание должно подаваться от батареи. Вентилятор также является еще одним механическим компонентом системы, что не является идеальным решением с точки зрения надежности.
Регулировка скорости — один из способов ответить на некоторые из этих возражений против использования вентилятора — может иметь следующие преимущества:
- Работа вентилятора медленнее снижает излучаемый им шум,
- , если вентилятор работает медленнее, он может снизить потребляемую мощность,
- , работающий медленнее вентилятора, увеличивает его надежность и срок службы.
Существует множество различных типов вентиляторов и способов управления ими. Мы обсудим здесь различные типы вентиляторов, а также преимущества и недостатки используемых сегодня методов управления. Один из способов классифицировать поклонников:
- 2-х проводные вентиляторы
- 3-проводные вентиляторы
- Вентиляторы 4-х проводные.
Здесь обсуждаются следующие методы управления вентиляторами:
- без управления вентилятором
- двухпозиционное управление
- линейное (постоянное) управление
- низкочастотная широтно-импульсная модуляция (ШИМ)
- высокочастотное управление вентилятором.
Типы вентиляторов
Двухпроводный вентилятор имеет клеммы питания и заземления. Трехпроводный вентилятор имеет питание, массу и тахометрический выход («тахометр»), который выдает сигнал с частотой, пропорциональной скорости. Четырехпроводной вентилятор имеет питание, массу, тахометр и вход для привода ШИМ. Короче говоря, ШИМ использует относительную ширину импульсов в последовательности двухпозиционных импульсов для регулировки уровня мощности, подаваемой на двигатель.
Управление двухпроводным вентилятором осуществляется путем регулировки либо напряжения постоянного тока, либо ширины импульса в низкочастотной ШИМ.Однако при наличии всего двух проводов сигнал тахометра не всегда доступен. Это означает, что нет никаких указаний относительно того, насколько быстро вентилятор работает — или действительно, работает ли он вообще. Эта форма управления скоростью — без обратной связи .
3-проводным вентилятором можно управлять с помощью привода того же типа, что и для 2-проводных вентиляторов — регулируемого постоянного тока или низкочастотной ШИМ. Разница между 2-проводными вентиляторами и 3-проводными вентиляторами заключается в наличии обратной связи от вентилятора для регулирования скорости с обратной связью.Сигнал тахометра показывает, работает ли вентилятор и его скорость.
Сигнал тахометра, управляемый напряжением постоянного тока, имеет прямоугольный выходной сигнал, очень похожий на «идеальный тахометр» на рисунке 1. Он всегда действителен, поскольку питание постоянно подается на вентилятор. Однако при низкочастотной ШИМ тахометр действителен только тогда, когда на вентилятор подается питание, то есть во время фазы импульса на . Когда привод ШИМ переключается на фазу выключен , внутренняя схема генерации сигнала тахометра вентилятора также отключается.Поскольку выходной сигнал тахометра обычно исходит от открытого стока, он будет иметь высокий уровень, когда привод ШИМ находится в положении от , как показано на рисунке 1. Таким образом, хотя идеальный тахометр отражает фактическую скорость вентилятора, привод ШИМ в эффект «отбивает» выходной сигнал тахометра и может давать ошибочные показания.
Рис. 1. Форма выходного сигнала тахометра в 3-проводных вентиляторах — идеальный вариант и с ШИМ-управлением.
Чтобы быть уверенным в правильности считывания скорости вращения вентилятора при ШИМ-регулировании, необходимо периодически переключать вентилятор на на время, достаточное для полного цикла тахометра.Эта функция реализована в ряде контроллеров вентиляторов Analog Devices, таких как ADM1031 и ADT7460.
В дополнение к сигналам питания, заземления и тахометра, 4-проводные вентиляторы имеют вход ШИМ, который используется для управления скоростью вентилятора. Вместо того, чтобы переключать питание всего вентилятора на и на , переключается только питание катушек возбуждения, делая информацию тахометра доступной постоянно. Включение и выключение катушек создает некоторый коммутационный шум .При работе катушек с частотой более 20 кГц шум перемещается за пределы слышимого диапазона, поэтому типичные сигналы привода вентилятора ШИМ используют довольно высокую частоту (> 20 кГц). Еще одно преимущество 4-проводных вентиляторов заключается в том, что скорость вращения вентилятора можно регулировать на уровне 10% от полной скорости вентилятора. На рисунке 2 показаны различия между 3-проводными и 4-проводными схемами вентилятора.
Рисунок 2. 3- и 4-проводные вентиляторы.
Управление вентилятором
Нет управления: Самый простой способ управления вентилятором — вообще не использовать его; просто запускайте вентилятор соответствующей мощности на полной скорости 100% времени.Основные преимущества этого — гарантированное безотказное охлаждение и очень простой внешний контур. Однако, поскольку вентилятор всегда включен, его срок службы сокращается, и он потребляет постоянное количество энергии, даже если охлаждение не требуется. Кроме того, его непрекращающийся шум может раздражать.
Включение / выключение: Следующим простейшим методом управления вентилятором является термостатический, или управление включением / выключением . Этот метод также очень легко реализовать. Вентилятор включается только тогда, когда необходимо охлаждение, и выключается на остальное время.Пользователь должен установить условия, при которых необходимо охлаждение — обычно, когда температура превышает предварительно установленный порог.
Analog Devices ADM1032 — идеальный датчик для управления включением / выключением вентилятора с использованием заданного значения температуры. У него есть компаратор, который выдает выходной сигнал THERM — обычно высокий , но переключает низкий , когда температура превышает программируемый порог. Он автоматически переключается обратно на high , когда температура падает на заданное значение ниже предела THERM.Преимущество этого программируемого гистерезиса заключается в том, что вентилятор не включается / выключается постоянно, когда температура приближается к пороговому значению. На рисунке 3 показан пример схемы, использующей ADM1032.
Рисунок 3. Пример схемы включения / выключения.
Недостаток управления включением / выключением в том, что он очень ограничен. Когда вентилятор переключается с на , он сразу же начинает раскручиваться до полной скорости, слышно и раздражающе. Поскольку люди быстро привыкают к звуку вентилятора, его выключение на также очень заметно.(Его можно сравнить с холодильником на вашей кухне. Вы не замечали шума, который он производил, пока он не выключился.) Таким образом, с акустической точки зрения управление включением / выключением далеко не оптимально.
Линейное управление: на следующем уровне управления вентилятором, линейное управление , напряжение, подаваемое на вентилятор, является переменным. Для более низкой скорости (меньшее охлаждение и более тихая работа) напряжение уменьшается, а для более высокой скорости оно увеличивается. У отношений есть ограничения. Рассмотрим, например, вентилятор на 12 В (максимальное номинальное напряжение).Такому вентилятору для запуска может потребоваться минимум 7 В. Когда он действительно начнет вращаться, он, вероятно, будет вращаться примерно на половину своей полной скорости при подаче напряжения 7 В. Из-за необходимости преодоления инерции напряжение, необходимое для запуска вентилятора, выше, чем напряжение, необходимое для его вращения. Так как напряжение, подаваемое на вентилятор, уменьшается, он может вращаться с меньшей скоростью, скажем, до 4 В, после чего он остановится. Эти значения будут отличаться от производителя к производителю, от модели к модели и даже от вентилятора к вентилятору.
ИС линейного управления вентиляторами ADM1028 от Analog Devices имеет программируемый выход и практически все функции, которые могут потребоваться для управления вентиляторами, включая возможность точного взаимодействия с термочувствительным диодом, предусмотренным на микросхемах, таких как микропроцессоры, которые составляют большая часть рассеивания в системе. (Назначение диода — обеспечить быструю индикацию критических температур перехода, избегая всех тепловых задержек, присущих системе. Он позволяет немедленно инициировать охлаждение при повышении температуры кристалла.) Чтобы поддерживать потребление энергии ADM1028 на минимальном уровне, он работает при напряжении питания от 3,0 В до 5,5 В с выходным напряжением + 2,5 В.
Вентиляторы
на 5 В позволяют регулировать скорость только в ограниченном диапазоне, поскольку их пусковое напряжение близко к уровню 5 В на полной скорости. Но ADM1028 можно использовать с 12-вольтовыми вентиляторами, используя простой повышающий усилитель со схемой, подобной показанной на рисунке 4.
Рис. 4. Схема наддува для управления вентилятором 12 В с использованием выходного сигнала ЦАП ADM1028 с линейным управлением вентилятором.
Основным преимуществом линейного управления является его бесшумность. Однако, как мы уже отметили, диапазон регулирования скорости ограничен. Например, вентилятор на 12 В с диапазоном управляющего напряжения от 7 В до 12 В может работать на половинной скорости при 7 В. Еще хуже обстоит дело с вентилятором на 5 В. Обычно для запуска 5-вольтовых вентиляторов требуется 3,5 В или 4 В, но при этом напряжении они будут работать почти на полной скорости с очень ограниченным диапазоном регулирования скорости. Но работа при 12 В с использованием схем, подобных показанной на рисунке 4, далека от оптимума с точки зрения эффективности.Это связано с тем, что повышающий транзистор рассеивает относительно большое количество энергии (когда вентилятор работает при 8 В, падение 4 В на транзисторе не очень эффективно). Требуемая внешняя цепь также относительно дорога.
ШИМ-управление : Превалирующим методом, который в настоящее время используется для управления скоростью вращения вентилятора в ПК, является низкочастотное ШИМ-управление . При таком подходе напряжение, подаваемое на вентилятор, всегда либо нулевое, либо полное, что позволяет избежать проблем, возникающих при линейном управлении при более низких напряжениях.На рисунке 5 показана типичная схема управления, используемая с выходом ШИМ от терморегулятора ADT7460.
Рисунок 5. Схема низкочастотного ШИМ-привода вентилятора.
Основным преимуществом этого метода привода является то, что он простой, недорогой и очень эффективный, поскольку вентилятор либо полностью на , либо полностью на .
Недостатком является то, что информация о тахометре прерывается управляющим сигналом ШИМ, поскольку питание не всегда подается на вентилятор. Информация о тахометре может быть получена с помощью метода, называемого растягиванием импульсов , — включение вентилятора на время, достаточное для сбора информации о тахометре (с возможным увеличением слышимого шума).На рис. 6 показан случай растяжения импульса.
Рисунок 6. Растяжение импульса для сбора тахометрической информации.
Еще один недостаток низкочастотной ШИМ — коммутационные шумы. При постоянном включении и выключении фанкойлов может присутствовать слышимый шум. Чтобы справиться с этим шумом, новейшие контроллеры вентиляторов Analog Devices предназначены для работы вентилятора с частотой 22,5 кГц, что находится за пределами слышимого диапазона. Схема внешнего управления проще с высокочастотной ШИМ, но ее можно использовать только с 4-проводными вентиляторами.Хотя эти вентиляторы появились на рынке относительно недавно, они быстро становятся все более популярными. На рисунке 7 изображена схема, используемая для высокочастотной ШИМ.
Рисунок 7. Схема управления вентилятором с высокочастотной ШИМ.
ШИМ-сигнал напрямую управляет вентилятором; приводной полевой транзистор встроен в вентилятор. Уменьшая количество внешних компонентов, этот подход значительно упрощает внешнюю схему. Поскольку управляющий сигнал ШИМ подается непосредственно на катушки вентилятора, электроника вентилятора всегда включена, а сигнал тахометра всегда доступен.Это устраняет необходимость в растягивании импульсов и создаваемых им шумах. Коммутационный шум также устраняется или значительно снижается, поскольку катушки переключаются с частотой за пределами слышимого диапазона.
Резюме
С точки зрения акустического шума, надежности и энергоэффективности наиболее предпочтительным методом управления вентиляторами является использование высокочастотного (> 20 кГц) ШИМ-привода.
Помимо устранения необходимости зашумленного растяжения импульсов и коммутационного шума, связанного с низкочастотной ШИМ, он имеет гораздо более широкий диапазон управления, чем линейное управление.При использовании высокочастотной ШИМ вентилятор может работать со скоростью до 10% от полной скорости, в то время как тот же вентилятор может работать только с минимальной скоростью 50% от полной скорости при линейном управлении. Он более энергоэффективен, потому что вентилятор всегда либо полностью включен, либо полностью выключен. (Когда полевой транзистор либо выключен, либо находится в состоянии насыщения, его рассеивание очень мало, что устраняет значительные потери в транзисторе в линейном случае.) Это тише, чем при постоянном включении или включении / выключении, поскольку вентилятор может работать на более низких скоростях. — это можно постепенно менять.Наконец, более медленная работа вентилятора также увеличивает срок его службы, повышая надежность системы.
| Метод управления | Преимущества | Недостатки |
| Вкл. / Выкл. | Недорого | Худшие акустические характеристики — вентилятор всегда работает. |
| линейный | Самый тихий | Дорогая схема Неэффективная — потеря мощности в цепи усилителя |
| Низкочастотный ШИМ | Эффективный Широкий диапазон регулирования скорости при измерении скорости | Шум при коммутации вентилятора Требуется растяжение импульса |
| Высокочастотный ШИМ | Эффективный Хорошая акустика, почти как линейная.Недорогая внешняя цепь Широкий диапазон регулирования скорости | Необходимо использовать 4-проводные вентиляторы |
Как работает регулятор вентилятора?
Автор: Andi
Регулятор вентилятора — это важный компонент, который служит для увеличения или уменьшения скорости вращения вентилятора в соответствии с вашими потребностями. У вас есть выбор между обычными и электронными регуляторами. Технология и схема, регулирующая скорость вращения вентилятора, довольно сложны.
Обычные регуляторы
Старые версии обычных регуляторов были довольно громоздкими. Квадратная коробка, выступающая из доски с круглой ручкой или тумблером, не создавала изящного внешнего вида. В коробке находились элементы схемы системы регулятора. Вам нужно было отрегулировать ручку, чтобы установить вентилятор на желаемую скорость. Современные обычные регуляторы представляют собой просто переключатель на плате, который включает переключатели для других электрических устройств в комнате.Вы не увидите регулирующий блок, спрятанный в стене за доской.
Чтобы понять, как работает регулятор, вы должны кое-что знать о сопротивлениях. Любой электрический проводник пропускает через себя ток. Однако проводник оказывает определенное сопротивление прохождению тока. Сопротивление зависит от материала проводника.
Регулятор имеет катушки с проволокой с разным сопротивлением. Когда вы устанавливаете ручку в определенное положение, вы включаете определенное сопротивление последовательно с вентилятором.Последовательное соединение подразумевает, что сопротивление соответствует вентилятору. Это снижает падение напряжения на вентиляторе и его скорость до желаемого уровня. Чем больше сопротивление, тем выше падение напряжения на нем, что снижает скорость вентилятора.
Рекомендации
Эти регуляторы доступны по разумной цене. Сложность их использования заключается в том, что тепло, выделяемое в сопротивлении, вызывает потери мощности. Следовательно, вы снижаете скорость вентилятора со значительными затратами.Фактически, вы получаете значительную потерю мощности, когда устанавливаете регулятор на очень низкую скорость вращения вентилятора.
Конденсаторные регуляторы
Вы можете решить эту проблему, используя конденсаторные регуляторы. Этот тип регулятора помогает экономить электроэнергию на всех скоростях вентилятора. Регулятор выглядит как ручка гораздо меньшего размера по сравнению с обычными резисторами. Вы можете изменить сопротивление, вращая ручку.
Идея конденсаторного регулятора осталась прежней: он регулирует напряжение на двигателе вентилятора.Теперь, когда вы увеличиваете емкость, напряжение на конденсаторе уменьшается, но напряжение на двигателе вентилятора увеличивается. Соответственно увеличивается скорость вентилятора. Другими словами, вам нужно увеличить емкость конденсатора, чтобы увеличить скорость вентилятора. Однако, поскольку в конденсаторах нет потерь мощности, не выделяется тепло и, следовательно, нет дополнительных затрат.
Преимущества конденсаторных резисторов
Конденсаторные резисторы
обладают множеством очевидных преимуществ. Они меньше, легче и менее неуклюжие на вид, чем их обычные аналоги.Кроме того, эти агрегаты обеспечивают линейное регулирование скорости. Поскольку они энергоэффективны, они помогают вам экономить электроэнергию. По сравнению с электронными регуляторами скорости, при включенном вентиляторе отсутствует отвлекающий жужжащий звук. Кроме того, вы можете рассчитывать на надежную работу, особенно по сравнению с электронными регуляторами.
Последовательные или параллельные двигатели — 4QD
Обычно двигатель должен приводиться в действие от источника напряжения, соответствующего его спецификации, но ряд наших клиентов просили соединить два двигателя 12 В последовательно, чтобы они работали от батареи 24 В.Наши контроллеры двигателей не имеют возможности узнать, сколько двигателей они приводят в движение, важна общая нагрузка [см. Наш калькулятор тока двигателя], поэтому вы можете использовать несколько двигателей, но вам нужно решить, подключать ли двигатели последовательно или параллельно.
Давайте рассмотрим два вышеупомянутых случая, оба с использованием батареи 24 В и с двигателями 12 В, каждый из которых рассчитан на 240 Вт и поэтому потребляет 20 А от батареи 12 В.
В первом случае с двигателями, включенными последовательно, когда контроллер выдает полную мощность, ток от контроллера будет течь через оба двигателя, но выход 24 В будет делиться, так что каждый двигатель будет видеть только 12 В.В этом случае каждый двигатель будет работать с заданной мощностью и будет выдавать выходную мощность 240 Вт.
Однако ……. Щетки и коммутатор в электродвигателе не всегда реагируют так, как вы могли бы ожидать. В некоторых двигателях щетки немного смещены относительно нейтрального положения, это называется синхронизацией щеток и используется для изменения рабочих характеристик двигателя. Мы не проводили математических расчетов по этому поводу, но эффект состоит в том, чтобы ограничить способность тока течь через комбинацию.Более чем один заказчик сталкивался с проблемами при последовательном использовании двигателей Graupner Speed 900BB на 12 В. Хотя двигатели будут работать без нагрузки, такое устройство не обеспечит значительного крутящего момента.
Итак, во втором случае, если двигатели подключены параллельно, тогда, когда контроллер выдает полную мощность, каждый двигатель будет видеть полные 24 В, теперь как Power = V 2 / R, и мы не изменили R, это приведет к каждый двигатель должен давать в 4 раза большую мощность, т.е. 960 Вт. Хотя это отличный способ повысить производительность, он, вероятно, не сильно повлияет на надежность.
Но помните, что у нас есть контроллер в цепи, поэтому все, что вам нужно сделать, это ограничить максимальный выход контроллера, чтобы он давал только 50% выходного сигнала [12 В], и нормальное обслуживание возобновится.
Подробнее о том, как контроллер снижает мощность, см. На этой странице о том, как работает ШИМ.
Если вы нашли эту статью полезной, поделитесь ею, чтобы помочь другим узнать ее
Основы частотно-регулируемых приводов
Когда Tesla впервые представила трехфазный асинхронный двигатель переменного тока в В 1888 году он знал, что его изобретение было более эффективным и надежным, чем двигатель постоянного тока Эдисона.Однако для управления скоростью двигателя переменного тока требуется либо изменение магнитного потока, либо изменение числа полюсов двигателя. Даже спустя десятилетия после того, как асинхронный двигатель получил широкое распространение, изменение частоты для управления скоростью оставалось чрезвычайно сложной задачей, а физическая конструкция двигателя не позволяла производителям создавать двигатели с более чем двумя скоростями.
В результате двигатели постоянного тока были необходимы там, где требовались точный контроль скорости и значительная выходная мощность.В отличие от требований к управлению скоростью электродвигателя переменного тока, управление скоростью электродвигателя постоянного тока было достигнуто путем включения реостата в цепь возбуждения постоянного тока малой мощности, что было осуществимо с помощью имеющихся технологий. Эти простые средства управления двигателем меняли скорость и крутящий момент, и в течение ряда десятилетий были наиболее экономичным способом сделать это.
Рис. 1. Идеальная синусоида и форма сигнала ШИМ.
К 1980-м годам технология приводов двигателей переменного тока стала достаточно надежной и недорогой, чтобы конкурировать с традиционными системами управления двигателями постоянного тока.Эти частотно-регулируемые приводы (ЧРП) точно регулируют скорость стандартных асинхронных или синхронных двигателей переменного тока. При использовании частотно-регулируемых приводов управление скоростью с полным крутящим моментом достигается от 0 об / мин до максимальной номинальной скорости и, если требуется, выше номинальной скорости при пониженном крутящем моменте. ЧРП регулируют частоту своего выхода, преобразуя входящий переменный ток в постоянный, а затем используя широтно-импульсную модуляцию напряжения для воссоздания формы выходного переменного тока и напряжения. Однако этот процесс преобразования частоты приводит к потере от 2% до 3% тепла в частотно-регулируемом приводе — калорийной энергии, которая должна рассеиваться.Процесс также приводит к скачкам перенапряжения и гармоническим искажениям тока.
Частотно-регулируемые типы
Существует три распространенных типа частотно-регулируемых приводов. Инверсия источника тока (CSI) успешно используется в системах обработки сигналов и в промышленных энергетических приложениях. CSI VFD — единственный тип, который имеет возможность рекуперации энергии. Другими словами, они могут поглощать обратный поток мощности от двигателя к источнику питания. ЧРП CSI выдают очень чистую форму волны тока, но для их конструкции требуются большие и дорогие индукторы, что приводит к появлению зубцов (пульсирующее движение во время вращения) ниже 6 Гц.
Приводы
с инверсией источника напряжения (VSI) имеют низкий коэффициент мощности, могут вызывать зубцовый сдвиг двигателя ниже 6 Гц и не являются регенеративными. Следовательно, диски CSI и VSI не получили широкого распространения.
ЧРП
с широтно-импульсной модуляцией (ШИМ) чаще всего используются в промышленности из-за отличного входного коэффициента мощности за счет фиксированного напряжения на шине постоянного тока, отсутствия зубчатого зацепления двигателя, более высокой эффективности и более низкой стоимости. ЧРП с ШИМ использует серию импульсов напряжения разной длины для имитации синусоидальной волны ( рис.1 на странице 8). В идеале импульсы синхронизируются так, чтобы средний интеграл привода по времени давал идеальную синусоиду. Текущий метод получения этой формы волны пропускает треугольную волну и синусоидальную волну через компаратор и выдает импульс напряжения всякий раз, когда значение синусоидальной волны больше, чем треугольная волна. В качестве электрического компонента тока для генерации импульса напряжения используется биполярный транзистор с изолированным затвором (IGBT), хотя кремниевые выпрямители (SCR) также могут работать.В ближайшем будущем для выполнения этой задачи будут использоваться затворные транзисторы с усиленной инжекцией (IEGT). В более долгосрочной перспективе мемристоры, вероятно, станут предпочтительным компонентом для этой задачи.
Мемристоры — четвертый пассивный элемент схемы, связывающий электрический заряд и магнитный поток. Предполагается, что мемристоры существуют уже более 30 лет, но не были изготовлены до апреля 2008 года Hewlett Packard Labs. Hewlett Packard надеется использовать эти устройства в качестве пассивных транзисторов, уменьшая их тепловыделение по сравнению с другими типами памяти.Независимо от компонента, используемого для формирования синусоидальной волны, переключение вызывает проблемы.
Тепло, потери мощности и гармоники
Первая проблема, которую необходимо решить производителю частотно-регулируемого привода, — это нагрев. Хотя частотно-регулируемые приводы являются высокоэффективными устройствами, производители не могут создать идеальный набор компонентов. Потери тепла в приводе регулируются следующим уравнением:
H потеря = P t (1-η)
Где H loss — потеря мощности (Вт), P t — мощность, проходящая через привод (Вт), а η — эффективность привода.Обычно ЧРП имеют рейтинг эффективности от 95% до 98%. Это означает, что количество воздуха, которое должно пройти через привод, определяется уравнением:
м = H потери ÷ (C p ΔT) = P t (1-η) ÷ (C p ΔT)
Где m — массовый расход (кг / с), C p — удельная теплоемкость воздуха [кДж ÷ (кг × K)], а ΔT — разница температур между входящим и выходящим воздухом ( К). Это тепло может привести к значительным затратам на охлаждение, которые будут добавлены к конструкции, особенно если привод не может быть размещен в неклассифицированном месте (в зоне, свободной от легковоспламеняющихся газов или частиц).Если привод должен быть размещен в засекреченном месте, то воздушный поток, идущий к приводу, необходимо будет продуть и создать давление.
Рис. 2. Реальная синусоида и форма сигнала ШИМ. Обратите внимание, как гармоники влияют на форму синусоиды.
Нагрев — только одна из проблем с частотно-регулируемыми приводами. Другая серьезная проблема связана с системными гармониками. Изображение ШИМ и вызываемых ими гармоник показано на рис. Рис. 2 . Неравномерности синусоидальной волны называются гармониками.В идеальном мире силовых цепей этих гармоник не должно быть. Они ничего не делают, но создают проблемы. К счастью, есть несколько способов уменьшить гармоники.
Один из простейших методов борьбы с гармониками — разместить синусоидальный фильтр по обе стороны от частотно-регулируемого привода. Со стороны линии они обычно называются линейными реакторами и имеют значения реактивного сопротивления от 1,5% до 5,0% импеданса. Более высокий импеданс не только задерживает больше гармоник, но также ограничивает мощность, поступающую на частотно-регулируемый привод.
Еще одна тактика, которую можно использовать на линейной стороне частотно-регулируемого привода, — это разместить конденсаторы на общей шине. Поскольку импеданс конденсатора обратно пропорционален частоте сигнала, гармоники видят короткое замыкание через конденсатор и проходят через конденсатор на землю, игнорируя другие нагрузки на шине. VFD могут также использовать активный интерфейс для ограничения гармоник, которые видит сторона линии. Активный входной каскад имеет еще один переключатель IGBT с обратным напряжением в качестве основного IGBT, но он проходит через фильтр верхних частот, так что основной сигнал мощности идет на землю.Сумма двух гармонических сигналов в идеале должна быть равна нулю. Если активный внешний привод по какой-либо причине не подходит, можно приобрести пассивный внешний VFD. Пассивные входные частотно-регулируемые приводы используют несколько фазосдвигающих трансформаторов и диодные мосты для подавления гармоник.
Чем больше импульсов у пассивного внешнего частотно-регулируемого привода, тем меньше проблем с гармониками. Компромисс заключается в том, что линейные напряжения должны быть хорошо сбалансированы, а каждый дополнительный фазосдвигающий трансформатор увеличивает стоимость и снижает эффективность.В крайних случаях можно приобрести изолирующий трансформатор. Хотя это один из самых эффективных способов предотвращения распространения гармоник, он также является одним из самых дорогостоящих.
Если гармоники недостаточно подавлены на линии VFD, могут возникнуть перекрестные помехи и перегрев. Перегрев может привести либо к уменьшению размеров шины, либо к увеличению затрат на охлаждение. Перекрестные помехи определяются как сигнал от одной цепи, создающей помехи другой цепи. Вообще говоря, это более серьезная проблема, чем перегрев.Примером может служить радиоприемник, который слегка расстроен. Несмотря на то, что через помехи можно слышать музыку, статические помехи раздражают. Перекрестные помехи — это неприятная вещь в телекоммуникационных цепях. В силовых цепях перекрестные помехи вызывают перегрев и срабатывание реле частоты.
Подобно тому, как гармоники, оставленные неотмеченными на стороне линии, могут вызывать проблемы, они могут создавать проблемы и на стороне нагрузки. Это из-за природы волн. Например, небольшое усилие, приложенное к Slinky с обоих концов, вызовет синусоидальную волну большой амплитуды.Электромагнитные волны действуют таким же образом, а это означает, что небольшое реактивное сопротивление может вызвать большие всплески напряжения. Поскольку это реактивное сопротивление является индуктивным по своей природе, большинство выходных фильтров представляют собой конденсаторы, подключенные по схеме треугольника. В идеале это должно привести к нулю реактивной части импеданса. Если полное сопротивление подобрано правильно, этого не произойдет.
Предупреждение: конденсаторы, подключенные на стороне нагрузки частотно-регулируемого привода, могут создать большое количество проблем, вплоть до выхода из строя привода.Поэтому перед установкой синусоидального фильтра на стороне нагрузки частотно-регулируемого привода рекомендуется проконсультироваться с производителем привода. В редких случаях может использоваться активный фильтр. Хотя они, как правило, работают хорошо, они довольно дороги и обычно должны разрабатываться индивидуально.
Преимущества ЧРП
Несмотря на то, что частотно-регулируемые приводы генерируют большое количество гармоник и тепла, они не получили бы такого широкого распространения и популярности, как сегодня, если бы не имели значительной экономической выгоды.
Электрически частотно-регулируемые приводы работают с высоким коэффициентом мощности. Асинхронные двигатели любого класса обычно имеют низкий коэффициент мощности при нагрузке на половину и три четверти (от 0,75 до 0,85). Это фактически сокращает срок службы двигателя, так как ненужное увеличение тока приводит к перегреву изоляции обмотки. VFD обходят эту проблему, управляя нагрузкой с частотой ниже основной.
Самая очевидная причина для приобретения частотно-регулируемого привода — это регулирование скорости. Обычно это делается для технологических, эксплуатационных и экономических выгод.Одним из экономических преимуществ является сокращение объема технического обслуживания при использовании частотно-регулируемого привода, особенно отсутствие необходимости иметь дело с угольными щетками двигателя постоянного тока или механическими коробками передач (трансмиссиями) с регулировкой скорости. Наиболее очевидные экономические преимущества частотно-регулируемых приводов связаны с вентиляторами и насосами. Мощность, потребляемая насосом или вентилятором, прямо пропорциональна кубу скорости. Это означает, что если оператор может запустить вентилятор на 80% от полной скорости, он теоретически использует 51% от полной мощности нагрузки.
ЧРП
также оптимизируют пусковые характеристики двигателя.Частотно-регулируемые приводы быстро разгоняют двигатели до полной скорости, потребляя от 100% до 150% тока полной нагрузки (FLA). Эта возможность запуска с нормальным значением FLA очень важна, если источник питания не может выдержать обычно шестикратное значение FLA при пуске через линию или даже ток устройства плавного пуска в размере 350% FLA. ЧРП делают это, управляя магнитным потоком асинхронного двигателя. Магнитный поток прямо пропорционален напряжению и обратно пропорционален частоте. При поддержании постоянного магнитного потока пусковой ток не превышает номинального значения FLA двигателя, и сохраняется полный крутящий момент.Это значительное улучшение по сравнению с плавным пуском, который имеет значительные проблемы с падением напряжения и не может запускаться при полной нагрузке.
Другой потенциально полезный аспект VFD продемонстрирован на Fig. 3 (щелкните здесь, чтобы увидеть Fig. 3 ), который показывает выходной сигнал VFD с постоянным крутящим моментом. Обратите внимание на две области: постоянный крутящий момент и постоянную мощность. Область постоянного крутящего момента не требует пояснений; ЧРП регулирует поток так, чтобы ток был постоянным.Как только частотный преобразователь частоты превышает номинальную частоту системы, напряжение не может увеличиваться из-за физических ограничений системы. Поскольку напряжение статично, а частота увеличивается, поток вынужден уменьшаться. Когда это происходит, ток и крутящий момент также уменьшаются. Это называется ослаблением поля. Хотя это не обязательно хорошо, это может быть полезно, если есть потребность в питании нагрузки с частичным крутящим моментом выше номинальной скорости. В дополнение к этой возможности, частотно-регулируемые приводы могут также принимать любую форму входного питания, будь то однофазный переменный ток, трехфазный переменный ток или постоянный ток.ЧРП, питаемые от источника постоянного тока, по-прежнему питают нагрузку переменного тока без внутреннего выпрямителя.
Частотные преобразователи
также могут применяться в электросетях. Одним из классических примеров этого является индукционный генератор с двойным питанием, в котором частотно-регулируемый привод может выдавать сигнал фиксированной частоты и напряжения на вход переменной скорости (частоты). Это обычно наблюдается в ветряных турбинах и других проектах малых гидроэлектростанций, которые будут подключены к электросети. Другие возобновляемые источники энергии, такие как фотоэлектрические элементы, могут использовать частотно-регулируемые приводы для работы в качестве инвертора перед подключением к электросети, хотя инверторы с понижающей-повышающей технологией более распространены.Хотя существует множество потенциальных применений частотно-регулируемых приводов в коммерческой электросети, они выходят за рамки данной статьи.
Таким образом, всякий раз, когда нагрузка имеет переменный крутящий момент или переменную скорость, следует рассмотреть возможность использования частотно-регулируемого привода. VFD можно рассмотреть, если у большого двигателя есть проблема с падением напряжения, крутящим моментом или пусковым током во время запуска. Несмотря на то, что частотно-регулируемые приводы, несомненно, решают изрядное количество проблем и обеспечивают значительную экономию энергии, выделяемое ими тепло необходимо рассеивать, а генерируемые ими гармоники необходимо ослаблять.
Новак — инженер-электрик в компании Fluor, Inc., Шугар Лэнд, Техас. С ним можно связаться по телефону [email protected].
Приводы с регулируемой скоростью — обзор
2.6 Приводы с регулируемой скоростью
Приводы с регулируемой скоростью (VSD), также называемые приводами с регулируемой скоростью (ASD), — это устройства, которые могут изменять скорость двигателя с фиксированной скоростью. В системах отопления, вентиляции и кондиционирования воздуха они используются в основном для управления вентиляторами в системах с переменным расходом воздуха вместо других устройств, таких как впускные лопатки и выпускные заслонки.Приводы с регулируемой скоростью более энергоэффективны, чем эти другие устройства (их главное преимущество), но они также снижают уровень шума при частичной нагрузке, позволяют вентиляторам работать с гораздо более низкими нагрузками, не вызывая скачков скорости вращения вентилятора (нестабильное состояние, которое может приводит к сильной пульсации и, возможно, к повреждению вентилятора), а также снижает износ механических компонентов, таких как ремни и подшипники. Приводы с регулируемой скоростью также используются для управления насосами в насосных системах с регулируемым расходом и для управления холодильными компрессорами в центробежных чиллерах.
Многие типы приводов с регулируемой скоростью использовались на протяжении многих лет, начиная с приводов постоянного тока, используемых в основном в промышленных приложениях, и до механических приводов с различным диаметром шкивов. Одним из наиболее важных достижений последних лет стало развитие технологии частотно-регулируемых приводов (VFD). В этих приводах используется твердотельная электронная схема для регулировки частоты и напряжения питания двигателя, что, в свою очередь, изменяет скорость.
Чаще всего в системах отопления, вентиляции и кондиционирования воздуха используются инверторы, использующие технологию широтно-импульсной модуляции (ШИМ) с синусоидальным кодированием.Схема ШИМ показана на Рис. 2-25 . ШИМ работает, сначала преобразуя входящую мощность переменного тока в постоянный ток с помощью выпрямителя на диодном мосту. Затем напряжение фильтруется, сглаживается и передается в секцию инвертирования ШИМ. Инвертор состоит из высокоскоростных биполярных транзисторов, которые регулируют как напряжение, так и частоту, подаваемые на двигатель.
Рисунок 2-25. Инверторный преобразователь частоты
Выходной сигнал, показанный на Рис. 2-26 , состоит из серии коротких импульсов напряжения.Выходное напряжение регулируется путем изменения ширины и количества импульсов напряжения, а выходная частота изменяется путем изменения длины цикла. Формируемая форма волны имеет необходимое напряжение и частоту для обеспечения желаемой скорости и крутящего момента двигателя, но она не такая гладкая, как входящий синусоидальный источник. По этой причине двигатели должны быть специально выбраны с соответствующей конструкцией и конструкцией, чтобы выдерживать менее плавный источник питания.
Рисунок 2-26. Форма сигнала ШИМ с синусоидальной кодировкой
Помните ли вы ранее в этой главе, когда мы отмечали, что, когда мы измеряем напряжение и ток в чисто синусоидальной цепи переменного тока, мы измеряем среднеквадратичное значение? В большинстве ситуаций четкое определение среднеквадратичного значения не имеет значения, поскольку форма волны близка к синусоидальной.Как вы можете видеть на рис. 2-26 , форма волны не является синусоидальной. Стандартный измеритель может показывать существенно высокие или низкие значения в этой неволновой ситуации. С выходом VFD действительно важно, чтобы вы использовали измеритель, предназначенный для получения «истинных среднеквадратичных значений». Измерители продаются как измерители с истинным среднеквадратичным значением и более дорогие, чем те, которые требуют ввода истинного синусоидального сигнала.
Преобразователи частоты (VSD) заменяют пускатель. У них есть как пусковая способность, так и встроенная защита от перегрузки.Фактически, микропроцессорное управление в большинстве приводов обеспечивает дополнительную защиту от других неисправностей (таких как пониженное напряжение, повышенное напряжение, замыкание на землю, потеря фазы и т. Д.). Приводы с регулируемой скоростью также обеспечивают плавный пуск двигателя (если он запрограммирован), снижая пусковой ток и уменьшая износ ремней и шкивов.
Хотя пускатель не требуется при использовании частотно-регулируемого привода / частотно-регулируемого привода, он может быть предусмотрен в качестве резервного привода, чтобы двигатель мог работать на полной скорости в случае отказа привода.Схема подключения байпасного пускателя показана на рис. 2-27 . На заре создания преобразователей частоты и частотно-регулируемых приводов обходные пускатели считались почти обязательными, но теперь, когда приводы стали более надежными, необходимость в байпасных пускателях стала гораздо менее критичной. Если требуется байпас, иногда желательно использование нескольких приводов, питаемых от одного байпаса аналогичного размера, что снижает стоимость покупки нескольких байпасов. При использовании байпасного стартера важно учитывать, насколько хорошо система будет работать на полной скорости.Например, в приложении вентилятора VAV работа вентилятора на полной скорости может вызвать очень высокое давление в воздуховоде при низкой скорости воздушного потока, потенциально повреждая систему воздуховодов. Некоторые новые преобразователи частоты имеют так называемые электронные байпасы, скорость вращения которых выбирается, и они не должны работать на полной скорости. (Эти электронные байпасы не являются независимыми; поэтому в них используются те же контакторы и устройства защиты от перегрузки, что и в VSD, поэтому они не являются полностью независимыми.