Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения. S = T/t.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду.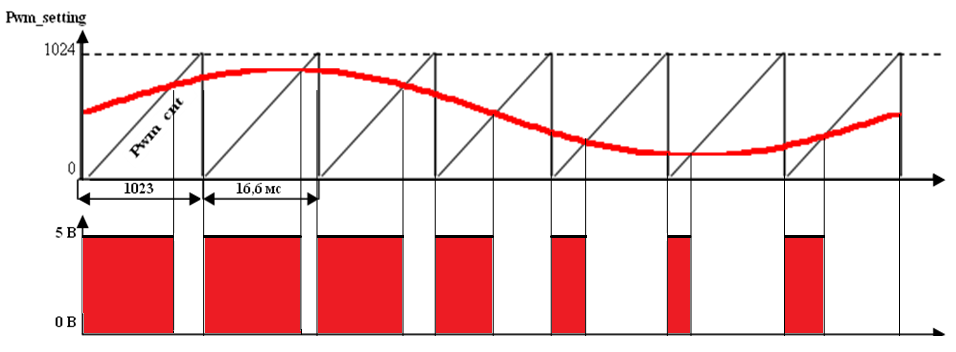 Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Смысл ШИМ заключается в регулировании среднего значения напряжения путем изменения коэффициента заполнения. Среднее значение напряжения равно произведению коэффициента заполнения и амплитуды напряжения. Так, при коэффициенте заполнения 0,3 и амплитуде напряжения 12 В среднее значение напряжения составит 0,3 х 12 = 3,6 (В). При изменении коэффициента заполнения в теоретически возможных пределах от 0% до 100% напряжение будет изменяться от 0 до 12 В, т.е. Широтно-импульсная модуляция позволяет регулировать напряжение в пределах от 0 до амплитуды сигнала. Что и используется для регулирования скорости вращения электродвигателя постоянного тока или яркости свечения светильника.
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Сигнал с выхода ШИМ можно также усреднять посредством простейшего фильтра низких частот.
 Иногда можно обойтись и без этого, поскольку электродвигатель обладает определенной электрической индуктивностью и механической инерцией. Сглаживание сигналов ШИМ происходит естественным путем в том случае, когда частота ШИМ превосходит время реакции регулируемого устройства.
Иногда можно обойтись и без этого, поскольку электродвигатель обладает определенной электрической индуктивностью и механической инерцией. Сглаживание сигналов ШИМ происходит естественным путем в том случае, когда частота ШИМ превосходит время реакции регулируемого устройства.
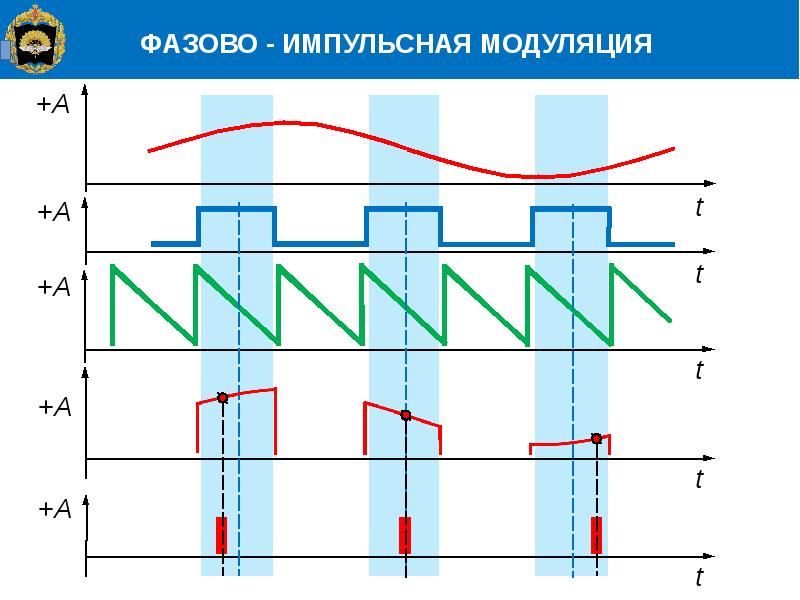
Реализовать ШИМ можно посредством компаратора с двумя входами, на один из которых подается периодический пилообразный или треугольный сигнал от вспомогательного генератора, а на другой модулирующий сигнал управления. Длительность положительной части импульса ШИМ определяется временем, в течение которого уровень управляющего сигнала, подаваемого на один вход компаратора, превышает уровень сигнала вспомогательного генератора, подаваемого на другой вход компаратора.
При напряжении вспомогательного генератора выше напряжения управляющего сигнала на выходе компаратора будет отрицательная часть импульса.
Коэффициент заполнения периодических прямоугольных сигналов на выходе компаратора, а тем самым и среднее напряжение регулятора, зависит от уровня модулирующего сигнала, а частота определяется частотой сигнала вспомогательного генератора.
Цифровая широтно-импульсная модуляция
Существует разновидность ШИМ, называемая цифровой ШИМ. В этом случае период сигнала заполняется прямоугольными подымпульсами, и регулируется уже количество подымпульсов в периоде, что и определяет среднюю величину сигнала за период.
В цифровой ШИМ заполняющие период подымпульсы (или «единички») могут стоять в любом месте периода. Среднее значение напряжения за период определяется только их количеством, при этом подымпульсы могут следовать один за другим и сливаться. Отдельно стоящие подымпульсы приводят к ужесточению режима работы ключа.
В качестве источника сигнала цифровой ШИМ можно использовать COM-порт компьютера с 10-битовым сигналом на выходе. С учетом 8 информационных битов и 2 битов старт/стоп, в сигнале COM-порта присутствует от 1 до 9 «единичек», что позволяет регулировать напряжение в пределах 10-90% напряжения питания с шагом в 10%.
Похожие темы:
Что такое ШИМ — принцип работы широтно-импульсной модуляции
Микропроцессоры работают исключительно с цифровыми сигналами: с логическим нулем (0В) или с логической единицей (5В или 3. 3В). По этой причине на выходе микропроцессор не может сформировать промежуточное напряжение. Применение для решения таких задач внешних ЦАП нецелесообразно из-за сложности. Специально для этого разработана широтно-импульсная модуляция — определенный процесс управления мощностью, идущей к нагрузке, методом изменения скважности импульсов постоянной частотности.
3В). По этой причине на выходе микропроцессор не может сформировать промежуточное напряжение. Применение для решения таких задач внешних ЦАП нецелесообразно из-за сложности. Специально для этого разработана широтно-импульсная модуляция — определенный процесс управления мощностью, идущей к нагрузке, методом изменения скважности импульсов постоянной частотности.
Что такое шим (широтно-импульсная модуляция)?
Это современный метод управления уровнем мощности подаваемой к нагрузке, заключающийся в изменении продолжительности импульса при постоянной частоте их следования. Это технология модуляции сигнала за счет вариативного изменения ширины импульсов, а не выходного напряжения. ШИМ преобразователь может быть аналоговый, цифровой и пр.
Широтно-импульсная модуляция — важнейшие параметры:
- Т -период тактирования — промежутки времени, через которые подаются импульсы.
- Длительность импульса — время пока подается сигнал.
- Скважность — рассчитанное по формуле соотношение длины импульса к импульсному Т периоду тактирования.

- D коэффициент заполнения — показатель обратный скважности.

Область применения
Применение ШИМ позволяет увеличить и намного коэффициент полезного действия электрических преобразователей. Тем более это относится к импульсным преобразователям, которые сегодня преимущественно применяются во вторичных источниках питания разных электронных аппаратов. Импульсные преобразователи обратноходовые, прямоходовые 1-тактные, 2-тактные, полумостовые, резонансные управляются с участием ШИМ.
Принцип ШИМ сегодня стал основным для электронных устройств, которым требуется поддержание на заданном уровне выходных параметров и их регулировка. Метод применяется для изменения скорости вращения двигателей, яркости света, управления силовым транзистором БП импульсного типа.
Используется ЩИМ модуляция и в системах управления яркостью светодиодов. Светодиод, благодаря низкой инерционности, успевает мигнуть на частоте всего в несколько десятков кГц. Для человеческого глаза работа светодиода в импульсном режиме воспринимается как свечение. Яркость светодиода зависит от продолжительности импульса в течение одного периода. При коэффициенте заполнения в 50%, то есть, если время свечения равно времени паузы, яркость светодиода составляет одну вторую номинальной величины. Когда появились светодиодные лампы 220В, нашлась проблема повышения их надёжности при нестабильном входном напряжении. Задача была решена разработкой драйвера питания, функционирующего по принципу ШИМ.
Яркость светодиода зависит от продолжительности импульса в течение одного периода. При коэффициенте заполнения в 50%, то есть, если время свечения равно времени паузы, яркость светодиода составляет одну вторую номинальной величины. Когда появились светодиодные лампы 220В, нашлась проблема повышения их надёжности при нестабильном входном напряжении. Задача была решена разработкой драйвера питания, функционирующего по принципу ШИМ.
Распространение устройств, функционирующих по принципу ШИМ, позволило уйти от линейных трансформаторных БП. В результате чего повысилось КПД и уменьшились масса и габариты источников питания. Поэтому сегодня ШИМ-контроллер является сегодня неотъемлемой частью импульсного БП. Он управляет силовым транзистором и напряжение на выходе блока питания всегда остаётся стабильным. Кроме этого, ШИМ-контроллер:
- обеспечивает плавный пуск преобразователя;
- ограничивает скважность и амплитуду управляющих импульсов;
- контролирует входное напряжение;
- защищает от КЗ силового ключа;
- в аварийной ситуации переводит устройство в деж. режим.
 режим.
режим.Сегодня широтно-импульсная модуляция применяется повсеместно и позволяет управлять яркостью подсветки ЖК дисплеев мобильных телефонов, смартфонов, ноутбуков. Реализована микросхема ШИМ в сварочных аппаратах, в автоинверторах, в зарядных устройствах и пр. В любом зарядном устройстве используется сегодня ШИМ.
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями.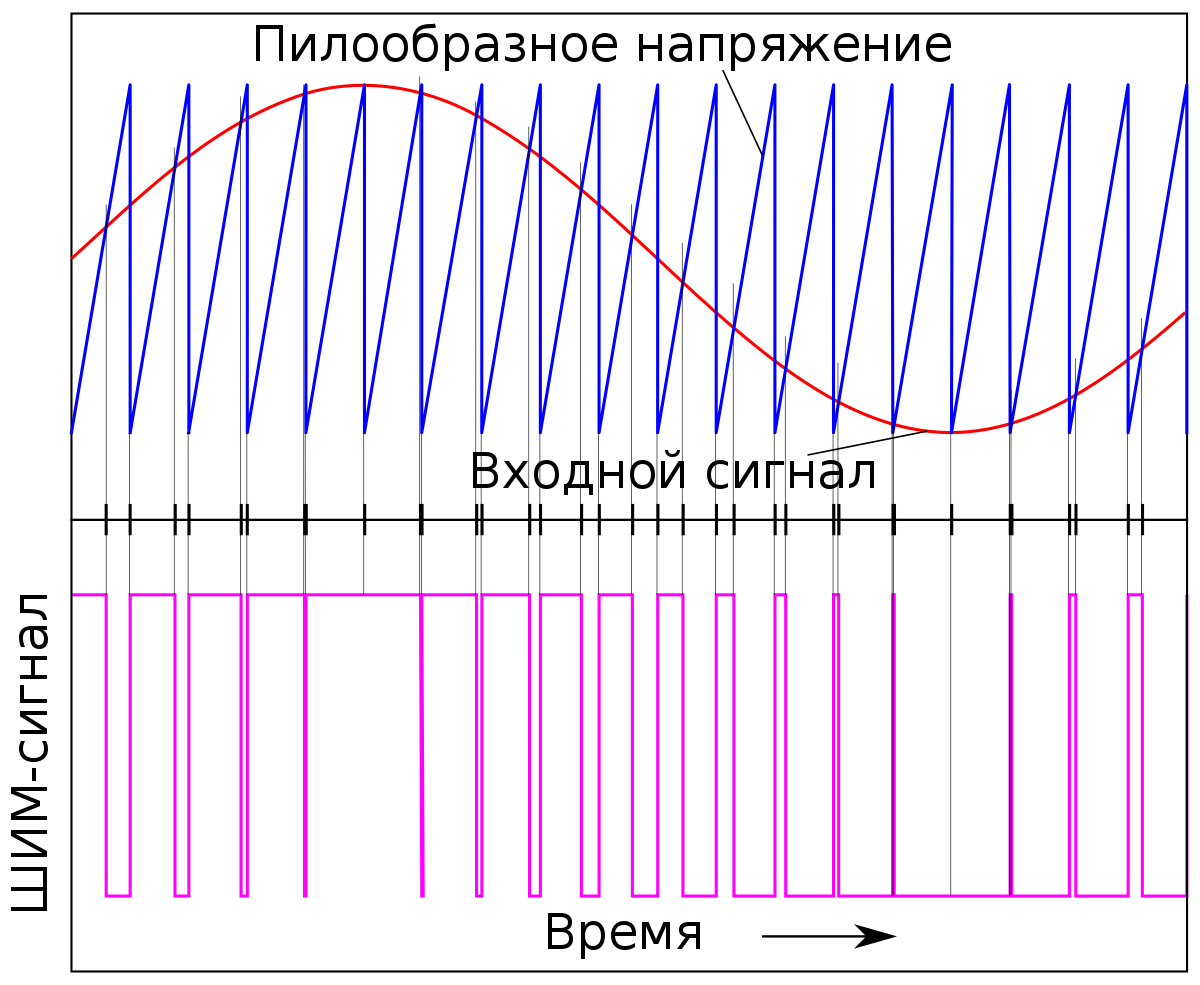 Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.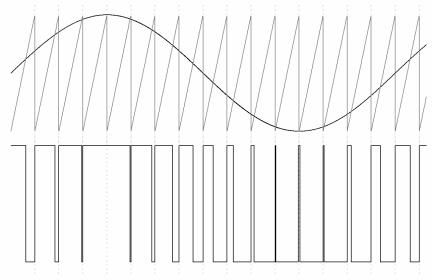
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Принцип шим-регулятора
Работа ШИМ регулятора сложностью не отличается. ШИМ-регулятор — устройство, выполняющее такую же функцию, что и традиционный линейный регулятор мощности (то есть, меняет напряжение или ток за счёт силового транзистора, рассеивающего значительную мощность на себе). Но ШИМ-регулятор отличается намного большим КПД. Достигается это благодаря тому, что управляющий силовой транзистор функционирует в ключевом режиме (либо включен, тогда пропускает большой ток, но мало падение напряжения, либо выключен — ток не проходит). В результате на таких силовых транзисторах мощность практически не рассеивается и энергия впустую не тратится.
После силового транзистора напряжение выходит как прямоугольные импульсы с изменяющейся скважностью в зависимости от необходимой мощности. Но сигнал нужно демодулировать (то есть, выделить среднее напряжение). Этот процесс происходит или в самой нагрузке (когда она индуктивного характера) или если между нагрузкой и силовым каскадом располагают фильтр нижних частот.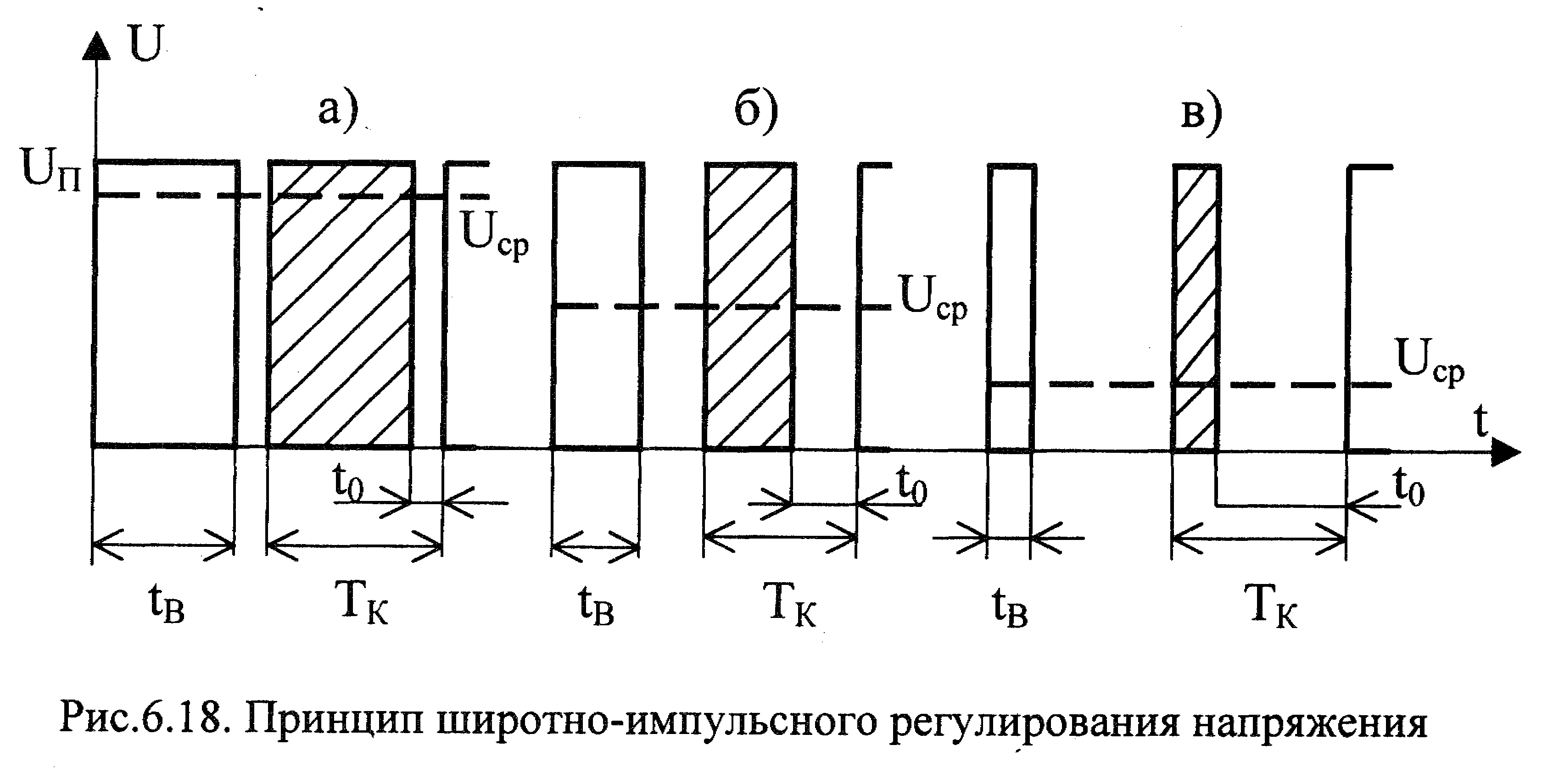
Пример использования шим регулятора
Самый простой пример использования регулятора напряжения ШИМ — ШИМ микросхема NE555, с которой знаком каждый радио-любитель. Благодаря ее универсальности можно конструировать самые разнообразные детали: от простейшего одновибратора импульсов с 2 в обвязке до модулятора, состоящего из большого числа компонентов. ШИМ регулятор напряжения имеет широкую область применения — это схемы регулировки яркости светодиодов и лент, а также регулировка скорости вращения движков.
В чем отличие между шим и шир?
На Западе понятия широтно-импульсного регулирования ШИР и ШИМ практически не различаются. Однако у нас между ними все же существует различие. Во многих микросхемах реализован принцип ШИР, однако при этом они все равно называются ШИМ контроллеры. Таким образом различий в названии этих двух способов практически нет.
Единственное отличие между ШИР и ШИМ — при ШИР время импульса и паузы постоянны. А при ШИМ их длительности изменяются, что позволяет сформировать выходной ШИМ сигнал заданной формы.
Широтно-импульсная модуляция
Добавлено 20 июля 2019 в 15:39
Сохранить или поделиться
Широтно-импульсная модуляция (ШИМ, PWM, pulse width modulation) использует цифровые сигналы для управления приложениями питания, а также достаточно проста для преобразования обратно в аналоговую форму с минимальным количеством аппаратного обеспечения.
Аналоговые системы, такие как линейные источники питания склонны генерировать большое количество тепла, поскольку они, по сути, представляют собой переменные резисторы, через которые проходит большой ток. Цифровые системы обычно не генерируют столько тепла. Почти всё генерирование тепла переключающим устройством происходит во время переходного процесса (который происходит быстро), когда устройство не открыто (включено) и не закрыто (выключено), а находится между ними. Это потому, что мощность равна:
\(P=VI \text{, или Мощность = Напряжение x Ток}\)
Если напряжение или ток близки к нулю, то и мощность будет близка к нулю. ШИМ в полной мере использует этот факт.
ШИМ в полной мере использует этот факт.
ШИМ может обладать многими характеристиками аналоговой системы управления, так как цифровой сигнал может иметь свободный ход. ШИМ не должен собирать данные, хотя есть и исключения, более высокоуровневые контроллеры.
Коэффициент заполнения
Одним из параметров любого прямоугольного сигнала является коэффициент заполнения. У большинства прямоугольных сигналов он составляет 50%, это нормально, но сигналы не обязательно должны быть симметричными. Время состояния «открыт» (включен) может варьироваться от полностью выключенного сигнала до полного включения, от 0% до 100%, и принимать любые значения во всем диапазоне.
Ниже показаны примеры коэффициента заполнения 10%, 50% и 90%. Хотя частоты у сигналов одинаковы, это не является обязательным требованием.
Рисунок 1 – Примеры ШИМ сигналов
Причина популярности ШИМ проста. У многих нагрузок, таких как резисторы, отклик (реакция) пропорционален потребляемой мощности. То есть преобразование между ними простое.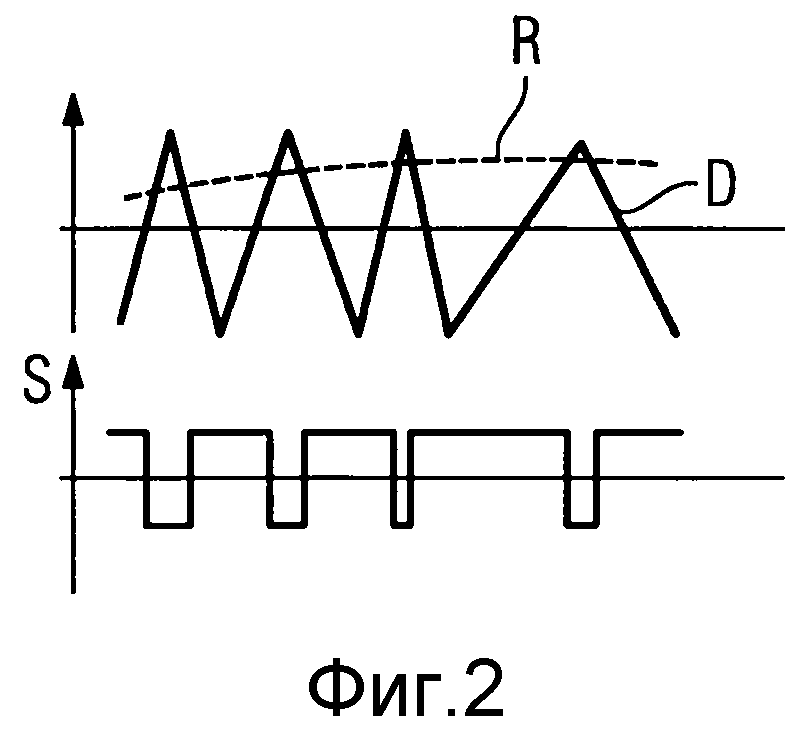 Но, например, у светодиодов отклик (реакция) на ток очень не линейна, подав на светодиод половину его номинального тока, вы всё равно получите больше половины светового потока, который может излучать светодиод. С ШИМ уровень света, производимый светодиодом, очень линеен. Двигатели, о которых будет рассказано позже, также хорошо реагируют на ШИМ.
Но, например, у светодиодов отклик (реакция) на ток очень не линейна, подав на светодиод половину его номинального тока, вы всё равно получите больше половины светового потока, который может излучать светодиод. С ШИМ уровень света, производимый светодиодом, очень линеен. Двигатели, о которых будет рассказано позже, также хорошо реагируют на ШИМ.
Одним из нескольких способов получения ШИМ сигнала является использование пилообразного сигнала и компаратора. Как показано ниже, пилообразный (или треугольный) сигнал не обязательно должен быть симметричным, но при этом важна линейность формы сигнала. Частота пилообразного сигнала соответствует частоте дискретизации сигнала.
Рисунок 2 – ШИМ модулятор. И почему симметричность наклонов формы сигнала не имеет значения.
Если не требуется никаких вычислений, то ШИМ может быть быстрым. Ограничивающим фактором является частотная характеристика компаратора. Это может не быть проблемой, так как в основных применениях используется довольно низкая скорость.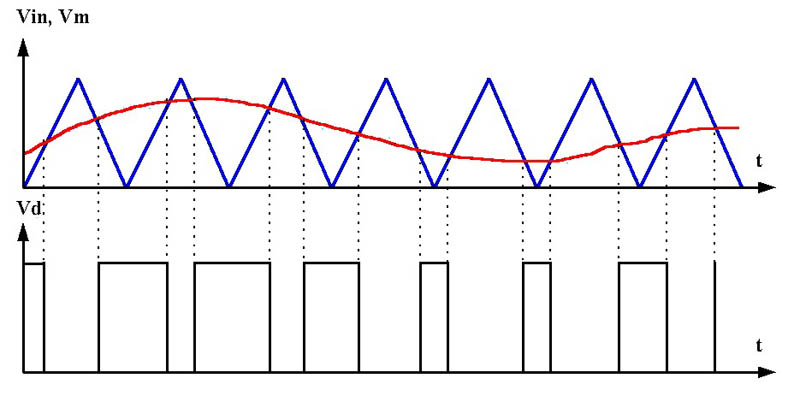 Некоторые микроконтроллеры имеют встроенный ШИМ и могут записывать или создавать необходимые сигналы.
Некоторые микроконтроллеры имеют встроенный ШИМ и могут записывать или создавать необходимые сигналы.
Область использования ШИМ довольно широка. ШИМ является сердцем усилителей класса D, где, увеличивая напряжение, вы увеличиваете максимальную выходную мощность, а частоту ШИМ выбираете за пределами человеческого слуха (обычно 44 кГц). Динамики не реагируют на высокие частоты, но повторяют низкие частоты, которые являются аудиосигналами. Для еще большей точности могут быть использованы более высокие частоты дискретизации, 100 кГц или более так же не слышны.
Рисунок 3 – Как аудиосигнал модулирует ШИМ сигнал
Еще одно популярное применение ШИМ – управление скоростью двигателя. Двигатели, как класс нагрузок, для работы требуют очень больших токов. Возможность изменять их скорость с помощью ШИМ значительно повышает эффективность всей системы. ШИМ более эффективны при управлении частотой вращения двигателя при низких оборотах, чем линейные методы.
H-мосты
ШИМ часто используется в сочетании с H-мостом.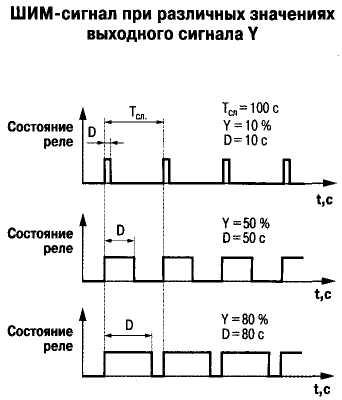 Эта схема названа так, потому что она напоминает букву H и позволяет удвоить эффективное напряжение на нагрузке, поскольку источник питания можно переключать в обе стороны от нагрузки. В случае индуктивных нагрузок, таких как двигатели, для подавления индуктивных пиков, способных повредить транзисторы, используются диоды. Индуктивность в двигателе также имеет тенденцию устранять высокочастотную составляющую сигнала. Данная схема также может использоваться с динамиками для аудиоусилителей класса D.
Эта схема названа так, потому что она напоминает букву H и позволяет удвоить эффективное напряжение на нагрузке, поскольку источник питания можно переключать в обе стороны от нагрузки. В случае индуктивных нагрузок, таких как двигатели, для подавления индуктивных пиков, способных повредить транзисторы, используются диоды. Индуктивность в двигателе также имеет тенденцию устранять высокочастотную составляющую сигнала. Данная схема также может использоваться с динамиками для аудиоусилителей класса D.
Несмотря на простоту, схема H-моста имеет один серьезный недостаток, при переходе между полевыми транзисторами возможен одновременный запуск обоих транзисторов сверху и снизу моста, что позволит полностью нагрузить блок питания. Это условие называется прострел (shoot through) и может возникнуть с любым типом транзисторов, используемых в H-мосте. Если источник питания достаточно мощный, транзисторы выйдут из строя. Поэтому перед транзисторами используются драйверы, которые запирают один транзистор перед тем, как открыть другой.
Рисунок 4 – Упрощенный H-мост
Импульсные источники питания
Импульсные источники питания (ИИП) также могут использовать ШИМ, хотя существуют и другие методы. Добавление схем, которые используют накопленную энергию в катушках индуктивности и конденсаторах, после основных переключающих компонентов может значительно повысить эффективность этих устройств, в некоторых случаях превышая 90%. Ниже приведен пример такой схемы.
Рисунок 5 – Пример импульсного источника питания, использующего ШИМ
Эффективность в этом случае измеряется как мощность. Если у вас есть импульсный источник питания с КПД 90%, и он преобразует 12 В постоянного напряжения в 5 В постоянного напряжения с током 10 ампер, то на стороне 12 В он будет потреблять ток примерно 4,6 А. 10% (5 Вт) будут выделяться в виде тепла. Будучи немного шумнее, этот тип стабилизаторов будет работать намного холоднее, чем его линейный аналог.
Оригинал статьи:
Теги
H-мостPWM / ШИМ (широтно-импульсная модуляция)ДвигательДвигатель постоянного токаИмпульсный источник питанияКоэффициент заполненияСкважностьШИМ модуляторЭлектродвигатель
Сохранить или поделиться
Широтно импульсная модуляция сигналов (ШИМ)
Широтно-импульсная модуляция сигналов (сокращенно ШИМ) — процесс представления сигнала в виде череды импульсов с постоянной частотой и управления уровнем этого сигнала путём изменения скважности данных импульсов. В английском варианте ШИМ имеет название pulse-width modulation (PWM)
Определение звучит сложно, но на самом деле все очень просто. Достаточно понять, что такое скважность и среднее результирующее напряжение. Самый простой способ разобраться в понятии скважности и представить, что такое ШИМ, — это рассмотреть участок цепи, который находится под постоянным напряжением Uп, в результате чего в цепи течет постоянный ток Iп. Временная диаграмма такой ситуации представлена на рисунке 1.
Рисунок 1
Из диаграммы видно, что напряжение остается постоянным во времени. Теперь представьте, что это постоянное напряжение Uп мы начинаем равномерно включать-выключать с высокой частотой, например 2000 раз в секунду. В результате получим набор импульсов рисунок 2.
Рисунок 2
Оказывается, что в этом случае набор импульсов воспринимается потребителем тока (каким либо устройством) как постоянное напряжение, но с другим (результирующим) уровнем напряжения Uрез. Это справедливо только при достаточно большой частоте импульсов. Чтобы оценить, как это результирующее напряжение отличается от постоянного, необходимо сравнить количество заряженных частиц, протекающих по проводнику за период импульсного колебания (время импульса + время паузы), с количеством заряда протекающего при постоянном напряжении за то же время.
После математических вычислений получим формулу: Uрез = (Uи·tи) / T ,
где Uи — напряжение импульса; tи — время длительности импульса; Т — период одного импульсного колебания (сумма времени импульса и времени паузы).
Таким образом, для случая, изображенного на рис. 2, когда продолжительность импульса равна времени паузы между импульсами (то есть Т=2·tи) , результирующее напряжение получится: Uрез = (Uи·tи)/2·tи = 0,5 Uи. Результирующее напряжение получилось в два раза меньше напряжения импульса. При этом важно отметить, что в теории выделяются такие коэффициенты, как скважность — S = T / tи и обратный ему коэффициент заполнения — D = tи / T . Он, как правило, выражается в процентах.
Фактически коэффициент заполнения показывает, на сколько процентов импульс заполняет весь период колебания Т. Если коэффициент заполнения D равен 1 (100%), то время импульса целиком заполняет период и фактически это постоянное напряжение. Если уменьшить коэффициент заполнения D, например, до 0,25 (25%), то длительность импульса будет всего 25% от всего периода, а результирующее напряжение будет уже в 4 раза меньше, как показано на рисунке 3.
Рисунок 3
Из всего сказанного следует и более наглядное понимание термина «Широтно-импульсная модуляция». Получается, что уровень сигнала (величина уровня напряжения) регулируется широтой импульса, т.е. сигнал модулируется посредством череды импульсов разной ширины.
Как видите, с помощью такой модуляции можно получать напряжения разных уровней. Причем в отличие от банального пропускания тока через резистор с целью уменьшения напряжения метод ШИМ гораздо экономичнее. Если регулировать напряжение резистором, то на нем выделяется тепло и часть электрической энергии теряется. При ШИМ энергии теряется существенно меньше, поэтому данная модуляция активно используется в различных регуляторах напряжения и блоках питания. Принципы импульсной модуляции используются для решения многих других задач.
Сгенерировать собственную ШИМ, а так ж собрать различные интересные схемы с применением устройств управляемых ШИМ, вы сможете в наборах первого уровня Эвольвектор.
Анализ сигналов широтно-импульсной модуляции | Rohde & Schwarz
Решение компании Rohde & Schwarz
Быстрый и простой способ получить общую картину ШИМ-сигнала — использовать функцию послесвечения осциллографа. Использование послесвечения может дать представление о типе присутствующих в сигнале импульсов. Кроме того, цветовая градация показывает области наибольшей активности сигнала.
Тем не менее, послесвечение и цветовая градация не обеспечивают детального анализа. Модулируется ли помимо длительности период? С какой частотой повторяется цикл модуляции? Сколько длительностей каждого значения встречается? Эти сведения необходимы при разработке различных электронных модулей, таких, например, как понижающие преобразователи, которые используются в источниках питания, схемах питания процессоров или зарядных устройствах.
Чтобы получить эту информацию, необходимо использовать методы более глубокого анализа.
Функция отслеживания осциллографов R&S®RTM3000 и R&S®RTA4000 способна демодулировать ШИМ-сигнал и извлекать основной сигнал модуляции в виде осциллограммы трека. Осциллограмма трека формируется из измеренных значений, расположенных в порядке времени их регистрации при захвате данных. Данный инструмент анализа отображает результаты любого заданного значения в зависимости от времени, обеспечивая четкое представление об изменении параметров ШИМ при измерении в течение относительно длительного интервала времени. В результате появляется возможность оценить правильность отслеживания и степень линейности в ШИМ-регуляторах/контроллерах.
Образец в функции отслеживания осциллографов R&S®RTM3000 и R&S®RTA4000, интегрированный в блок матопераций, позволяет задавать верхний (однополярный сигнал) и нижний (биполярный сигнал) пороговые уровни для демодулируемого сигнала.
Блок матопераций содержит следующие стандартные функции анализа трека:
- Трек: период (одно- и биполярный)
- Трек: частота (одно- и биполярный)
- Трек: длительность импульса (одно- и биполярный)
- Трек: коэффициент заполнения (одно- и биполярный)
Широтно-импульсная модуляция
3.2. Принцип работы ШИМ Цифровая ШИМ
В двоичной цифровой технике, выходы в которой могут принимать только одно из двух значений, приближение желаемого среднего уровня выхода при помощи ШИМ является совершенно естественным. Схема настолько же проста: пилообразный сигнал генерируется N -битным счётчиком. Цифровые устройства ЦШИП работают на фиксированной частоте, обычно намного превышающей реакцию управляемых установок передискретизация. В периоды между фронтами тактовых импульсов выход ЦШИП остаётся стабильным, на нём действует либо низкий уровень, либо высокий, в зависимости от выхода цифрового компаратора, сравнивающего значение счётчика с уровнем приближаемого цифрового сигнала V n. Выход за много тактов можно трактовать как череду импульсов с двумя возможными значениями 0 и 1, сменяющими друг друга каждый такт T. Частота появления единичных импульсов получается пропорциональной уровню приближаемого сигнала ~ V n. Единицы, следующие одна за другой, формируют контур одного, более широкого импульса. Длительности полученных импульсов переменной ширины ~ V n кратны периоду тактирования T, а частота равна 1/T *2 N. Низкая частота означает длительные, относительно T, периоды постоянства сигнала одного уровня, что даёт невысокую равномерность распределения импульсов.
Описанная цифровая схема генерации подпадает под определение однобитной двухуровневой импульсно-кодовой модуляции ИКМ. 1-битную ИКМ можно рассматривать в терминах ШИМ как серию импульсов частотой 1/ T и шириной 0 либо T. Добиться усреднения за менее короткий промежуток времени позволяет имеющаяся передискретизация. Высоким качеством обладает такая разновидность однобитной ИКМ, как импульсно-плотностная модуляция, которая ещё именуется импульсно-частотной модуляцией.
Восстанавливается непрерывный аналоговый сигнал арифметическим усреднением импульсов за много периодов при помощи простейшего фильтра низких частот. Хотя обычно даже этого не требуется, так как электромеханические составляющие привода обладают индуктивностью, а объект управления ОУ — инерцией, импульсы с выхода ШИМ сглаживаются и ОУ, при достаточной частоте ШИМ-сигнала, ведёт себя как при управлении обычным аналоговым сигналом.
В цифровой ШИМ период делится на части, которые заполняются прямоугольными подымпульсами. Средняя величина за период зависит от количества прямоугольных подымпульсов. Цифровая ШИМ — приближение бинарного сигнала с двумя уровнями — вкл / выкл к многоуровневому или непрерывному сигналу так, чтобы их средние значения за период времени t 2 − t 1 {\displaystyle t_{2}-t_{1}} были бы приблизительно равны.{n}{A*\Delta T_{i}} \over {t_{2}-t_{1}}},}
где x t {\displaystyle xt} — входной сигнал в пределах от t 1 до t 2 ;
Δ T i = t 2 − t 1 n {\displaystyle \Delta T_{i}={\frac {t_{2}-t_{1}}{n}}} — продолжительность i -го ШИМ подымпульса, каждого с амплитудой A ;
n выбирается таким образом, чтобы за период разность суммарных площадей энергий обеих величин была меньше допустимой:
∫ t 1 t 2 x t d t − ∑ i = 1 n A ∗ Δ T i
Что такое ШИМ – Широтно-Импульсная Модуляция? ⋆ diodov.net
Рассмотрим, что такое ШИМ или PWM. А также, чем отличается ШИМ от ШИР. Алгоритм широтно-импульсной модуляции применяется для плавного изменения мощности на нагрузке, поступающей от источника питания. Например, с целью регулирования скорости вращения вала двигателя; плавности изменения яркости освещения или подсветки. Отдельной широкой областью применения ШИМ являются импульсные источники питания и автономные инверторы.
Для питания нагрузки часто необходимо изменять величину напряжения, подводимого от источника питания. Принципиально можно выделить два способа регулирования напряжения – линейный и импульсный.
Примером линейного способа может послужить переменный резистор. При этом значительная часть мощности теряется на резисторе. Чем больше разница напряжений источника питания и потребителя, тем ощутимей потери мощности, которая попросту «сгорает» на резисторе, превращаясь в тепло. Поэтому линейный способ регулирования рационально применять только при небольшой разнице входного и выходного напряжений. В противном случае коэффициент полезного действия источника питания в целом будет очень низкий.
В современной преобразовательной технике преимущественно используются импульсное регулирование мощности на нагрузке. Одним из способов реализации импульсного регулирования является широтно-импульсная модуляция ШИМ. В англоязычной литературе PWM – pulse-width modulation.
Принцип импульсного регулирования
Основными элементами любого типа импульсного регулятора мощности являются полупроводниковые ключи – транзисторы или тиристоры. В простейшем виде схема импульсного источника питания имеет следующий вид. Источника постоянного напряжения Uип ключом K подсоединяется к нагрузке Н. Ключ К переключается с определенной частотой и остается во включенном состоянии определенную длительность времени. С целью упрощения схемы я на ней не изображаю другие обязательные элементы. В данном контексте нас интересует только работа ключа К.
Чтобы понять принцип ШИМ воспользуемся следующим графиком. Разобьем ось времени на равные промежутки, называемые периодом T. Теперь, например половину периода мы будем замыкать ключ K. Когда ключ замкнут, к нагрузке Н подается напряжение от источника питания Uип. Вторую часть полупериода ключа находится в закрытом состоянии. А потребитель останется без питания.
Время, в течение которого ключ замкнут, называется временем импульса tи. А время длительности разомкнутого ключа называют временем паузы tп. Если измерить напряжение на нагрузке, то оно будет равно половине Uип.
Среднее значение напряжения на нагрузке можно выразить следующей зависимостью:
Uср.н = Uип tи/T.
Отношение времени импульса tи к периоду T называют коэффициентом заполнения D. А величина, обратная ему называется скважностью:
S = 1/D = T/tи.
На практике удобнее пользоваться коэффициентом заполнения, который зачастую выражают в процентах. Когда транзистор полностью открыт на протяжении всего времени, то коэффициент заполнения D равен единице или 100 %.
Если D = 50 %, то это означает, что половину времени за период транзистор находится в открытом состоянии, а половину в закрытом. В таком случае форма сигнала называется меандр.
Следовательно, изменяя коэффициент D от 0 до единицы или до 100 % можно изменять величину Uср.н от 0 до Uип:
Uср.н = Uип∙D.
А соответственно регулировать и величину подводимой мощности:
Pср.н = Pип∙D.
Широтно-импульсное регулирование ШИР
В западной литературе практически не различают понятия широтно-импульсного регулирования ШИР и широтно-импульсной модуляции ШИМ. Однако у нас различие между ними все же существует.
Сейчас во многих микросхемах, особенно применяемых в DC-DC преобразователях, реализован принцип ШИР. Но при этом их называют ШИМ контроллерами. Поэтому теперь различие в названии между этими двумя способами практически отсутствует.
В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного и задающего напряжения, а также компаратор.
Рассмотрим упрощенную схему, в которой аккумуляторная батарея GB питает потребитель Rн импульсным способом посредством транзистора VT. Сразу скажу, что в данной схеме я специально не использовал такие элементы, необходимые для работы схемы: конденсатор, дроссель и диод. Это сделано с целью упрощения понимания работы ШИМ, а не всего преобразователя.
Упрощенно, компаратор имеет три вывода: два входа и один выход. Компаратор работает следующим образом. Если величина напряжения на входном выводе «+» (неинвертирующий вход) выше, чем на входе «-» (инвертирующий вход), то на выходе компаратора будет сигнал высокого уровня. В противном случае – низкого уровня.
В нашем случае, именно сигнал высокого уровня открывает транзистор VT. Рассмотрим, как формируется необходимая длительность времени импульса tи. Для этого воспользуемся следующим графиком.
При ШИР на одни вход компаратора подается сигнал пилообразной формы заданной частоты. Его еще называют опорным. На второй вход подается задающее напряжение, которое сравнивается с опорным. В результате сравнения на выходе компаратора формируется импульс соответствующей длительности.
Если на неинверитирующем входе компаратора опорный сигнал, то сначала будет идти пауза, а затем импульс. Если на неинвертирующий вход подать задающий сигнал, то сначала будет импульс, затем пауза.
Таким образом, изменяя значение задаваемого сигнала, можно изменять коэффициент заполнения, а соответственно и среднее напряжение на нагрузке.
Частоту опорного сигнала стремятся сделать максимальной, чтобы снизить параметры дросселей и конденсаторов (на схеме не показаны). Последнее приводит к снижению массы и габаритов импульсного блока питания.
ШИМ – широтно-импульсная модуляция
ШИМ в преобладающем большинстве применяется для формирования сигнала синусоидальной формы. Часто ШИМ применяется для управления работой инверторного преобразователя. Инвертор предназначен для преобразования энергии постоянного тока в энергию переменного тока.
Рассмотрим простейшую схему инвертора напряжения.
В один момент времени открывается пара транзисторов VT1 и VT3. Создается путь для протекания тока от аккумулятора GB через активно-индуктивную нагрузку RнLн. В следующий момент VT1 и VT3 заперты, а открыты диагонально противоположные транзисторы VT2 и VT4. Теперь тока протекает от аккумулятора через RнLн в противоположном направлении. Таким образом, ток на нагрузке изменяет свое направление, поэтому является переменным. Как видно, ток на нагрузке не является синусоидальным. Поэтому применяют ШИМ для получения синусоидально формы тока.
Существует несколько типов ШИМ: однополярная, двухполярная, одностороння, двухсторонняя. Здесь мы не будем останавливаться на каждом конкретном типе, а рассмотрим общий подход.
В качестве модулирующего сигнала применяется синусоида, а опорным является сигнал треугольной формы. В результате сравнивания этих сигналов формируются длительности импульсов и пауз (нижний график), которые управляют работой транзисторов VT1…VT4.
Обратите внимание, что амплитуда напряжения на нагрузке всегда равна амплитуде источника питания. Также остается неизменным период следования импульсов. Изменяется лишь ширина открывающего импульса. Поэтому при подключении нагрузки ток, протекающий через нее, будет иметь синусоидальную форму (показано пунктиром на нижнем графике).
Так вот, основное отличие между ШИР и ШИМ заключается в том, что при широтно-импульсном регулировании время импульса и паузы сохраняют постоянное значение. А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы.
Еще статьи по данной теме
Что это такое и как работает?
Цифровые сигналы имеют два положения: включено или выключено, что сокращенно интерпретируется как 1 или 0. Аналоговые сигналы, с другой стороны, могут быть включены, выключены, наполовину, две трети пути к включению и бесконечное число. позиций от 0 до 1 либо приближается к 1, либо опускается до нуля. В электронике они используются по-разному, но очень часто они должны работать вместе (именно тогда мы называем это «электроникой со смешанными сигналами»). Иногда нам приходится принимать аналоговый (реальный) входной сигнал (например.g., температура) в микроконтроллер (который понимает только цифровой). Часто инженеры переводят этот аналоговый вход в цифровой вход для микроконтроллера (MCU) с помощью аналого-цифрового преобразователя. А как насчет выходов?
PWM — это способ управления аналоговыми устройствами с цифровым выходом. Другими словами, вы можете выводить модулирующий сигнал с цифрового устройства, такого как MCU, для управления аналоговым устройством. Это одно из основных средств, с помощью которых микроконтроллеры управляют аналоговыми устройствами, такими как двигатели с регулируемой скоростью, регулируемые источники света, исполнительные механизмы и динамики.Однако ШИМ не является настоящим аналоговым выходом. ШИМ «имитирует» аналогичный результат путем подачи мощности импульсами или короткими всплесками регулируемого напряжения.
Рисунок 1: Пример сигнала ШИМ, показанного при нескольких рабочих циклах и высоком уровне напряжения 5 вольт. Красная линия — это среднее напряжение, которое испытывает приводимое устройство (например, двигатель). (Источник: Тимоти Хирзель,)
Примером может служить подача полного напряжения на двигатель или лампу на доли секунды или импульсное напряжение на двигатель с интервалами, которые заставляют двигатель или лампу делать то, что вы хотите.На самом деле напряжение прикладывается, а затем снимается много раз за интервал, но вы испытываете аналогичный отклик. Если вы когда-либо запускали коробочный вентилятор, периодически подавая питание, вы столкнетесь с ШИМ-ответом. Вентилятор и его двигатель не останавливаются мгновенно из-за инерции, поэтому к моменту повторного включения питания он лишь немного замедлится.
Следовательно, у вас не будет резкой остановки мощности, если двигатель приводится в действие ШИМ. Продолжительность времени, в течение которого импульс находится в заданном состоянии (высокий / низкий), является «шириной» пульсовой волны.
Рисунок 2: Синие линии — это выход ШИМ микроконтроллера, а красная линия — среднее напряжение. В этом случае ширина импульса (и соответствующий рабочий цикл) изменяется так, что среднее напряжение больше похоже на аналоговый выход, который не находится в устойчивом состоянии, как показано на рисунке 1. (Источник: Zureks — собственная работа, CC BY- SA 3.0,)
Устройство, управляемое ШИМ, в конечном итоге ведет себя как среднее значение импульсов. Средний уровень напряжения может быть постоянным или подвижной целью (динамической / изменяющейся во времени).Чтобы упростить пример, предположим, что ваш вентилятор с ШИМ-управлением имеет высокое напряжение 24 В. Если импульс генерируется с высоким уровнем 50% времени, мы называем это коэффициентом заполнения 50%. Термин рабочий цикл используется повсюду в электронике, но в каждом случае рабочий цикл представляет собой сравнение «включено» и «выключено».
Возвращаясь к нашему примеру с двигателем вентилятора, если мы знаем, что высокое напряжение — 24, низкое — 0 В, а рабочий цикл — 50%, то мы можем определить среднее напряжение, умножив рабочий цикл на высокий уровень импульса.Если вы хотите, чтобы двигатель работал быстрее, вы можете установить на выходе ШИМ более высокий рабочий цикл. Чем выше частота высоких импульсов, тем выше среднее напряжение и тем быстрее будет вращаться двигатель вентилятора. ЕСЛИ вы создавали свой собственный выход ШИМ, подключая вентилятор и вынимая его из розетки с равными интервалами: 1 секунда в розетку, 1 секунда — выход, тогда вы действуете как цифровой выход, который управляет вентилятором со стабильным средним значением 12 В. .
Аналогия возникает, когда вы увеличиваете частоту включения и выключения розетки так, чтобы она была в розетке только на ½ секунды, а из розетки — на ½ секунды.На данный момент ваш рабочий цикл все еще составляет 50%, но вы увеличили количество циклов в секунду до двух. В электронике мы определяем частоту как количество циклов в секунду или герц (Гц). Вы увеличили скорость вентилятора. Эти ½ секунды — это ширина создаваемого вами импульса.
Вы, наверное, уже догадались, что ШИМ, рабочий цикл и частота взаимосвязаны. Мы используем рабочий цикл и частоту для описания ШИМ, и мы часто говорим о частоте применительно к скорости. Например, двигатель с частотно-регулируемым приводом производит реакцию, как аналоговое устройство в реальном мире.Отдельные импульсы, которые получает двигатель VFD, для нас не различимы; насколько мы можем видеть, импульсы настолько быстрые (обычно где-то в миллисекундах), что по стандартам реального мира это просто похоже на нарастание двигателя.
Если вы возьмете рабочий цикл и умножите его на уровень высокого напряжения (который является цифровым состоянием «включено» или «1» для MCU), вы получите средний уровень напряжения, который видит двигатель. в тот момент.
Рабочий цикл
x уровень высокого напряжения = среднее напряжение
Теперь вставьте слово «мгновенный», и вы поймете, что вещи динамически меняются… что выглядит более аналогично (см. Рисунок 2):
Мгновенный рабочий цикл x уровень высокого напряжения = мгновенное среднее напряжение
Рабочий цикл может измениться, чтобы повлиять на среднее напряжение, которое испытывает двигатель.Частота циклов может увеличиваться. Пульс можно даже увеличить по длине. Все это тоже может происходить вместе, но в целом проще представить себе, что рабочий цикл увеличивается на или частота увеличивается, чтобы увеличить скорость двигателя. (Ширина импульса напрямую связана с рабочим циклом, поэтому, если вы решите увеличить ширину импульса, вы просто измените рабочий цикл.)
Единственное, что во всем этом не изменилось, — это высокий уровень напряжения, потому что «on» всегда одинаково для цифрового выхода; простое включение и выключение выхода с разной скоростью и в течение разного времени — вот как можно получить широтно-импульсную модуляцию для имитации аналогового выхода.Микроконтроллеры цифровые. Примером чего-то, что может создать настоящий аналоговый выход, может быть преобразователь (то, что напрямую переводит физическое явление в аналоговый сигнал). Но преобразователи — это другое аналоговое обсуждение.
Что такое ШИМ: широтно-импульсная модуляция
Инверторы, преобразователи, схемы SMPS и контроллеры скорости …. Одна вещь, которая является общей для всех этих схем, состоит в том, что они состоят из множества электронных переключателей внутри. Эти переключатели представляют собой не что иное, как силовые электронные устройства, такие как MOSFET, IGBT, TRIAC и т. Д.Для управления такими силовыми электронными переключателями мы обычно используем так называемые сигналы ШИМ (широтно-импульсная модуляция). Помимо этого, сигналы PWM также используются для управления серводвигателями, а также для других простых задач, таких как управление яркостью светодиода.
В нашей предыдущей статье мы узнали об АЦП, в то время как АЦП используется для считывания аналоговых сигналов с помощью цифрового устройства, такого как микроконтроллер. ШИМ можно рассматривать как полную противоположность ему, ШИМ используется для создания аналоговых сигналов от цифрового устройства, такого как микроконтроллер .В этой статье мы узнаем о , что такое ШИМ , сигналы ШИМ и некоторые параметры, связанные с ними, так что мы будем уверены в их использовании в наших проектах.
Что такое ШИМ (широтно-импульсная модуляция)?
PWM означает широтно-импульсную модуляцию; мы рассмотрим причину такого названия позже. Но пока понимайте ШИМ как тип сигнала, который может быть произведен цифровой ИС, такой как микроконтроллер или таймер 555. Созданный таким образом сигнал будет иметь последовательность импульсов, и эти импульсы будут иметь форму прямоугольной волны.То есть в любой данный момент времени волна будет либо высокой, либо низкой. Для простоты понимания давайте рассмотрим сигнал ШИМ 5 В, в этом случае сигнал ШИМ будет либо 5 В (высокий), либо на уровне земли 0 В (низкий). Продолжительность, в течение которой сигналы остаются на высоком уровне, называется « , время включения », а продолжительность, в течение которой сигнал остается на низком уровне, называется « , время отключения ».
Для сигнала ШИМ нам нужно посмотреть на два важных параметра, связанных с ним: один — это рабочий цикл ШИМ, а другой — частота ШИМ.
Рабочий цикл ШИМ
Как было сказано ранее, сигнал ШИМ остается включенным в течение определенного времени, а затем остается выключенным до конца этого периода. Что делает этот сигнал ШИМ особенным и более полезным, так это то, что мы можем установить, как долго он должен оставаться включенным, контролируя рабочий цикл сигнала ШИМ.
Процент времени, в течение которого сигнал ШИМ остается ВЫСОКИМ (по времени), называется рабочим циклом. Если сигнал всегда включен, это 100% -ный рабочий цикл, а если он всегда выключен, это 0% -ный рабочий цикл.Формулы для расчета рабочего цикла показаны ниже.
Рабочий цикл = время включения / (время включения + время выключения)
Следующее изображение представляет сигнал ШИМ с рабочим циклом 50%. Как вы можете видеть, учитывая весь период времени (время включения + время выключения), сигнал ШИМ остается включенным только в течение 50% периода времени.
Регулируя рабочий цикл от 0% до 100%, мы можем управлять « on time » сигнала PWM и, следовательно, шириной сигнала.Поскольку мы можем модулировать ширину импульса, он получил свое культовое название « Широтно-импульсная модуляция ».
Частота ШИМ
Частота сигнала ШИМ определяет, насколько быстро ШИМ завершает один период. Один период — это полное время включения и выключения сигнала ШИМ, как показано на рисунке выше. Формулы для расчета частоты приведены ниже
.
Частота = 1 / Период времени Период времени = время включения + время выключения
Обычно сигналы ШИМ, генерируемые микроконтроллером, составляют около 500 Гц, такие высокие частоты будут использоваться в высокоскоростных коммутационных устройствах, таких как инверторы или преобразователи.Но не всем приложениям требуется высокая частота. Например, для управления серводвигателем нам необходимо генерировать сигналы ШИМ с частотой 50 Гц, поэтому частота сигнала ШИМ также может управляться программой для всех микроконтроллеров.
Некоторые часто возникающие вопросы по ШИМ
В чем разница между рабочим циклом и частотой сигнала ШИМ?
Часто путают рабочий цикл и частоту сигналов ШИМ.Как мы знаем, сигнал ШИМ представляет собой прямоугольную волну с определенным временем включения и выключения. Сумма времени включения и времени выключения называется одним периодом времени. Значение, обратное одному периоду времени, называется частотой. В то время как количество времени, в течение которого сигнал ШИМ должен оставаться включенным в один период времени, определяется рабочим циклом ШИМ.
Проще говоря, скорость включения и выключения ШИМ-сигнала определяется , частота сигнала ШИМ и на этой скорости, как долго ШИМ-сигнал должен оставаться включенным, определяется рабочим циклом ШИМ-сигнал .
Как преобразовать сигналы ШИМ в аналоговое напряжение?
Для простых приложений, таких как управление скоростью двигателя постоянного тока или регулировка яркости светодиода, нам необходимо преобразовать сигналы ШИМ в аналоговое напряжение. Это легко сделать с помощью RC-фильтра и обычно используется там, где требуется функция ЦАП. Схема для этого же показана ниже
На приведенном выше графике желтый цвет — это сигнал ШИМ, а синий — выходное аналоговое напряжение.Значение резистора R1 и конденсатора C1 можно рассчитать на основе частоты сигнала ШИМ, но обычно используются резистор 5,7 кОм или 10 кОм и конденсатор 0,1 или 1 мк.
Как рассчитать выходное напряжение сигнала ШИМ?
Выходное напряжение ШИМ-сигнала после его преобразования в аналоговый будет в процентах от рабочего цикла. Например, если рабочее напряжение составляет 5 В, то сигнал ШИМ также будет иметь 5 В при высоком уровне. В таком случае для 100% рабочего цикла выходное напряжение будет 5 В, для 50% рабочего цикла будет 2.5В.
Выходное напряжение = Рабочий цикл (%) * 5
Примеры:
Ранее мы использовали ШИМ с различными микроконтроллерами во многих наших проектах:
Далее проверьте все проекты, связанные с ШИМ здесь.
широтно-импульсной модуляции | Электроприводы постоянного тока
Широтно-импульсная модуляция (PWM) использует цифровые сигналы для управления силовыми приложениями, а также его довольно легко преобразовать обратно в аналоговый с минимумом оборудования.
Аналоговые системы, такие как линейные источники питания, склонны выделять много тепла, поскольку они в основном представляют собой переменные резисторы, пропускающие большой ток. Цифровые системы обычно не выделяют столько тепла. Почти все тепло, выделяемое переключающим устройством, происходит во время перехода (что происходит быстро), в то время как устройство не включается и не выключается, а находится между ними. Это потому, что мощность соответствует следующей формуле:
P = E I, или Вт = напряжение X ток
Если напряжение или ток близки к нулю, мощность будет близка к нулю.PWM в полной мере использует этот факт.
PWM может обладать многими характеристиками аналоговой системы управления в том смысле, что цифровой сигнал может свободно вращаться. ШИМ не должен захватывать данные, хотя есть исключения из этого для контроллеров более высокого уровня.
Рабочий цикл
Одним из параметров любой прямоугольной волны является скважность. Большинство прямоугольных волн составляют 50%, это норма при их обсуждении, но они не обязательно должны быть симметричными. Время включения может быть полностью изменено между выключенным сигналом и полным включением, от 0% до 100% и всеми диапазонами между ними.
Ниже показаны примеры рабочего цикла 10%, 50% и 90%. Хотя частота одинакова для всех, это не является обязательным требованием.
Причина популярности ШИМ проста. Многие нагрузки, такие как резисторы, включают мощность в число, соответствующее процентному соотношению. Преобразование в его аналоговое эквивалентное значение несложно. Светодиоды очень нелинейны в своей реакции на ток, дают светодиоду половину его номинального тока, и вы все равно получаете более половины света, который светодиод может производить.При использовании ШИМ уровень освещенности светодиода очень линейный. Двигатели, о которых мы поговорим позже, также очень хорошо реагируют на ШИМ.
Одним из нескольких способов создания ШИМ является использование пилообразного сигнала и компаратора. Как показано ниже, пилообразная (или треугольная) волна не обязательно должна быть симметричной, но важна линейность формы волны. Частота пилообразного сигнала — это частота дискретизации сигнала.
Если не требуется никаких вычислений, ШИМ может быть быстрым.Ограничивающим фактором является АЧХ компараторов. Это может не быть проблемой, поскольку довольно часто используется довольно низкая скорость. Некоторые микроконтроллеры имеют встроенный ШИМ и могут записывать или создавать сигналы по запросу.
Использование ШИМ сильно различается. Это сердце усилителей звука класса D, увеличивая напряжение, вы увеличиваете максимальную выходную мощность и выбирая частоту, выходящую за пределы человеческого слуха (обычно 44 кГц), можно использовать ШИМ. Динамики не реагируют на высокие частоты, но дублируют низкие частоты, которые являются звуковым сигналом.Для еще большей точности можно использовать более высокие частоты дискретизации, и 100 кГц или намного выше не являются чем-то необычным.
Еще одно популярное приложение — регулирование скорости двигателя. Двигатели как класс требуют для работы очень высоких токов. Возможность изменять их скорость с помощью ШИМ немного увеличивает эффективность всей системы. ШИМ более эффективен при управлении скоростью двигателя на низких оборотах, чем линейные методы.
H-мосты
PWM часто используется вместе с H-мостом.Эта конфигурация названа так, потому что она напоминает букву H и позволяет удвоить эффективное напряжение на нагрузке, поскольку источник питания можно переключать с обеих сторон нагрузки. В случае индуктивных нагрузок, таких как двигатели, диоды используются для подавления индуктивных всплесков, которые могут повредить транзисторы. Индуктивность в двигателе также имеет тенденцию отклонять высокочастотную составляющую формы волны. Эта конфигурация также может использоваться с динамиками для аудиоусилителей класса D.
Несмотря на то, что эта схема H-моста в основном точна, она имеет один серьезный недостаток: при переключении между полевыми МОП-транзисторами возможно, что оба транзистора сверху и снизу будут включены одновременно, и на них будет возложена вся нагрузка, которую может обеспечить источник питания. .Это состояние называется «пробег через » и может произойти с любым типом транзистора, используемым в H-мосте. Если источник питания достаточно мощный, транзисторы не выживут. Для этого используются драйверы перед транзисторами, которые позволяют одному выключиться, прежде чем позволить другому включиться.
Импульсный источник питания
Импульсные источники питания
(SMPS) также могут использовать ШИМ, хотя существуют и другие методы. Добавление топологий, которые используют накопленную мощность как в катушках индуктивности, так и в конденсаторах после основных коммутирующих компонентов, может значительно повысить эффективность этих устройств, в некоторых случаях превышающую 90%.Ниже приведен пример такой конфигурации.
КПД в данном случае измеряется мощностью. Если у вас есть SMPS с эффективностью 90%, и он преобразует 12 В постоянного тока в 5 В постоянного тока при 10 А, сторона 12 В будет потреблять примерно 4,6 А. Неучтенные 10% (5 Вт) будут отображаться как отходящее тепло. Хотя этот тип регулятора немного шумнее, он будет работать намного холоднее, чем его линейный аналог.
СВЯЗАННЫЕ РАБОЧИЕ ЛИСТЫ:
Введение в широтно-импульсную модуляцию
Представляем мощный метод управления аналоговыми цепями с помощью цифровых выходов микропроцессора.
Широтно-импульсная модуляция (ШИМ) — это мощный метод управления аналоговыми цепями с помощью цифровых выходов микропроцессора. ШИМ используется в самых разных приложениях, от измерения и связи до управления мощностью и преобразования.
Аналоговые схемы
Аналоговый сигнал имеет постоянно изменяющееся значение с бесконечным разрешением как по времени, так и по величине. Батарея на девять вольт является примером аналогового устройства, поскольку ее выходное напряжение не равно 9 В, меняется со временем и может принимать любое числовое значение.Точно так же количество тока, потребляемого от батареи, не ограничивается конечным набором возможных значений. Аналоговые сигналы отличаются от цифровых сигналов, потому что последние всегда принимают значения только из конечного набора заранее определенных возможностей, таких как набор {0V, 5V}.
Аналоговые напряжения и токи могут использоваться для непосредственного управления вещами, например громкостью автомобильного радио. В простом аналоговом радиоприемнике ручка соединена с переменным резистором. Когда вы поворачиваете ручку, сопротивление увеличивается или уменьшается.При этом ток, протекающий через резистор, увеличивается или уменьшается. Это изменяет величину тока, подаваемого на динамики, тем самым увеличивая или уменьшая громкость. Аналоговая схема — это такая же схема, как радио, выход которой линейно пропорционален входу.
Каким бы интуитивным и простым ни казалось аналоговое управление, оно не всегда экономически привлекательно или практично. Во-первых, аналоговые схемы имеют тенденцию с течением времени дрейфовать, и поэтому их очень сложно настроить.Прецизионные аналоговые схемы, которые решают эту проблему, могут быть очень большими, тяжелыми (подумайте о старом домашнем стереооборудовании) и дорогими. Аналоговые схемы также могут сильно нагреваться; рассеиваемая мощность пропорциональна напряжению на активных элементах, умноженному на ток через них. Аналоговая схема также может быть чувствительной к шуму. Из-за его бесконечного разрешения любое возмущение или шум в аналоговом сигнале обязательно изменяет текущее значение.
Цифровое управление
Цифровое управление аналоговыми цепями позволяет значительно снизить системные затраты и энергопотребление.Более того, многие микроконтроллеры и DSP уже включают в себя контроллеры PWM на кристалле, что упрощает реализацию.
Вкратце, ШИМ — это способ цифрового кодирования уровней аналогового сигнала. За счет использования счетчиков высокого разрешения рабочий цикл прямоугольной волны модулируется для кодирования определенного уровня аналогового сигнала. Сигнал PWM по-прежнему является цифровым, потому что в любой момент времени полное питание постоянного тока либо полностью включено, либо полностью отключено. Источник напряжения или тока подается на аналоговую нагрузку посредством повторяющейся серии импульсов включения и выключения.Время включения — это время, в течение которого питание постоянного тока подается на нагрузку, а время выключения — это период, в течение которого это питание отключено. При наличии достаточной полосы пропускания любое аналоговое значение может быть закодировано с помощью ШИМ.
На рисунке 1 показаны три различных сигнала ШИМ. На рисунке 1а показан выход ШИМ при рабочем цикле 10%. То есть сигнал включен в течение 10% периода, а остальные 90% выключен. На рисунках 1b и 1c показаны выходы ШИМ при рабочем цикле 50% и 90% соответственно. Эти три выхода ШИМ кодируют три различных значения аналогового сигнала: 10%, 50% и 90% от полной мощности.Если, например, напряжение питания 9 В, а рабочий цикл 10%, будет получен аналоговый сигнал 0,9 В.
Рисунок 1: ШИМ-сигналы с различной скважностью
На рисунке 2 показана простая схема, которая может управляться с помощью ШИМ. На рисунке батарея 9 В питает лампочку накаливания. Если бы мы замкнули переключатель, соединяющий батарею и лампу, на 50 мс, лампочка в течение этого интервала будет получать 9 В. Если мы затем разомкнем выключатель на следующие 50 мс, лампа получит 0 В.Если мы будем повторять этот цикл 10 раз в секунду, лампочка будет гореть, как если бы она была подключена к батарее 4,5 В (50% от 9 В). Мы говорим, что рабочий цикл составляет 50%, а частота модуляции составляет 10 Гц.
Рисунок 2: Простая схема
Для большинства нагрузок, как индуктивных, так и емкостных, требуется гораздо более высокая частота модуляции, чем 10 Гц. Представьте, что наша лампа была включена на пять секунд, затем выключена на пять секунд, а затем снова включена. Рабочий цикл по-прежнему будет составлять 50%, но первые пять секунд лампочка будет ярко гореть, а в следующие — не горит.Чтобы лампочка могла видеть напряжение 4,5 В, период цикла должен быть коротким по сравнению со временем реакции нагрузки на изменение состояния переключателя. Чтобы добиться желаемого эффекта диммерной (но всегда горящей) лампы, необходимо увеличить частоту модуляции. То же самое и в других приложениях ШИМ. Общие частоты модуляции находятся в диапазоне от 1 кГц до 200 кГц.
Аппаратные контроллеры
Многие микроконтроллеры включают в себя контроллеры ШИМ. Например, Microchip PIC16C67 включает в себя два, каждый из которых имеет выбираемые время и период.Рабочий цикл — это отношение продолжительности включения к периоду; частота модуляции обратна периоду. Чтобы начать работу с ШИМ, в техническом паспорте указано, что программное обеспечение должно:
- Установите период во встроенном таймере / счетчике, который обеспечивает модулирующую прямоугольную волну.
- Установите время включения в регистре управления ШИМ.
- Установите направление вывода ШИМ, который является одним из выводов ввода / вывода общего назначения.
- Запустите таймер.
- Включите ШИМ-контроллер.
Хотя конкретные контроллеры ШИМ действительно различаются по программным деталям, основная идея в целом одна и та же.
Связь и управление
Одним из преимуществ ШИМ является то, что сигнал остается цифровым на всем пути от процессора до управляемой системы; Цифро-аналоговое преобразование не требуется. Сохранение цифрового сигнала сводит к минимуму шумовые эффекты. Шум может повлиять на цифровой сигнал только в том случае, если он достаточно силен, чтобы изменить логическую 1 на логический 0 или наоборот.
Повышенная помехозащищенность — еще одно преимущество выбора ШИМ по сравнению с аналоговым управлением и основная причина, по которой ШИМ иногда используется для связи. Переход с аналогового сигнала на ШИМ может значительно увеличить длину канала связи. На приемном конце подходящая цепь RC (резистор-конденсатор) или LC (индуктор-конденсатор) может удалить модулирующую высокочастотную прямоугольную волну и вернуть сигнал в аналоговую форму.
PWM находит применение в самых разных системах.В качестве конкретного примера рассмотрим тормоз с ШИМ-управлением. Проще говоря, тормоз — это устройство, которое сильно что-то зажимает. Во многих тормозах величина зажимного давления (или тормозного усилия) регулируется аналоговым входным сигналом. Чем больше напряжения или тока подается на тормоз, тем большее давление оказывает тормоз.
Выход контроллера ШИМ может быть подключен к переключателю между питанием и тормозом. Чтобы обеспечить большую мощность торможения, программному обеспечению нужно только увеличить рабочий цикл выходного сигнала ШИМ.Если требуется конкретное тормозное давление, необходимо провести измерения для определения математической зависимости между рабочим циклом и давлением. (И полученные формулы или справочные таблицы будут изменены с учетом рабочей температуры, поверхностного износа и т. Д.)
Чтобы установить давление на тормоз, скажем, 100 фунтов на квадратный дюйм, программное обеспечение будет выполнять обратный поиск, чтобы определить рабочий цикл, который должен создавать такое количество силы. Затем он установит рабочий цикл ШИМ на новое значение, и тормоз отреагирует соответствующим образом.Если в системе имеется датчик, рабочий цикл можно регулировать с помощью управления с обратной связью, пока не будет точно достигнуто желаемое давление.
PWM экономичен, компактен и невосприимчив к шуму. И теперь это в твоей сумке с хитростями. Так что используйте это.
Майкл Барр — главный редактор ESP. Он также является автором книги «Программирование встроенных систем на языках C и C ++ » (O’Reilly, 1999) и адъюнкт-преподавателем Университета Мэриленда.
Пишите ему по адресу.
Вернуться к сентябрю 2001 г. Содержание
Продолжить чтение
Широтно-импульсная модуляция [Analog Devices Wiki]
Цель
В этой лаборатории мы исследуем широтно-импульсную модуляцию и ее использование в различных приложениях.
Широтно-импульсная модуляция (ШИМ) — это метод кодирования аналогового сигнала в один цифровой бит. Сигнал ШИМ состоит из двух основных компонентов, которые определяют его поведение: рабочий цикл и частота.
Он используется для передачи информации путем кодирования сообщения в импульсный сигнал, а также для управления мощностью электронных устройств, таких как двигатели, и в качестве основного алгоритма для фотоэлектрических зарядных устройств солнечных батарей.
Рабочий цикл описывает количество времени, в течение которого сигнал находится в высоком (включенном) состоянии, как процент от общего времени, необходимого для завершения одного цикла.
На следующей диаграмме показаны последовательности импульсов при рабочем цикле 0%, 25% и 100%.
Частота определяет, насколько быстро ШИМ завершает цикл и, следовательно, насколько быстро он переключается между высоким и низким состояниями.
При включении и выключении цифрового сигнала с достаточно высокой скоростью и с определенным рабочим циклом выходной сигнал будет вести себя как аналоговый сигнал постоянного напряжения при подаче питания на устройства, которые реагируют намного медленнее, чем частота ШИМ, например аудиоколонки, электродвигатели и соленоидные приводы.
Материалы
Модуль активного обучения ADALM2000
Макетная плата без пайки и комплект перемычек
1 Операционный усилитель OP97
1 Резистор 1 кОм
1 потенциометр 10 кОм
Широтно-импульсный модулятор — Принцип работы
Широтно-импульсная модуляция (ШИМ) — это метод генерации низкочастотных выходных сигналов из высокочастотных импульсов. Быстрое переключение выходного напряжения ветви инвертора между верхним и нижним напряжениями шины постоянного тока, низкочастотный выход можно рассматривать как среднее значение напряжения за период переключения.
Помимо этого, есть также несколько других способов генерации сигналов с широтно-импульсной модуляцией, включая аналоговые методы, сигма-дельта модуляцию и прямой цифровой синтез.
Один из простейших методов генерации сигнала ШИМ — это сравнение двух управляющих сигналов, сигнала несущей и сигнала модуляции. Это известно как несущая ШИМ. Несущий сигнал представляет собой высокочастотный (частота переключения) треугольный сигнал. Сигнал модуляции может иметь любую форму.
Используя этот подход, выходной сигнал может быть ШИМ-представлением любой желаемой формы сигнала.В машинах синусоидальные и трапециевидные формы сигналов являются одними из самых распространенных.
Рассмотрим схему на рисунке 1.
Рисунок 1. Принцип работы ШИМ.
Следуя описанию принципа ШИМ, мы используем отрицательный вход операционного усилителя для несущей, а положительный вход для сигнала модуляции. Таким образом, более высокий сигнал модуляции приведет к выходу с высоким уровнем в течение большей части периода ШИМ.
Настройка оборудования
Создайте следующую макетную схему для широтно-импульсной модуляции.
Рисунок 2. Принцип работы ШИМ — макетная схема.
Процедура
Используйте первый генератор сигналов в качестве несущего сигнала, обеспечивающего размах амплитуды 4 В, смещение 2,5 В, возбуждение треугольной волны кГц для схемы. Используйте второй генератор сигналов в качестве сигнала модуляции с размахом амплитуды 3 В, 2.Смещение 5 В, синусоида 50 Гц.
Подайте на операционный усилитель + 5В от источника питания. Настройте осциллограф так, чтобы входной сигнал отображался на канале 1, а выходной сигнал отображался на канале 2.
На рисунке представлены два канала генератора сигналов, содержащие два входных сигнала (оранжевый — сигнал несущей, фиолетовый — сигнал модуляции).
График выходного сигнала на канале 2 осциллографа представлен на рисунке 4.
Если мгновенная величина сигнала модуляции больше, чем сигнал несущей в определенный момент времени, выходной сигнал будет высоким. Если сигнал модуляции ниже, чем сигнал несущей, выходной сигнал будет низким.
Если пик модуляции меньше, чем пик несущего сигнала, выходной сигнал будет точным ШИМ-представлением сигнала модуляции. Редактировать
Управление шириной импульса с использованием напряжения модуляции постоянного тока
Фон
Для этого конкретного приложения мы будем использовать простой операционный усилитель в конфигурации режима переключения (дополнительные сведения см. В разделе «Действие: операционный усилитель в качестве компаратора»), чтобы продемонстрировать широтно-импульсную модуляцию постоянного напряжения.
Рассмотрим схему на рисунке 5.
Рисунок 5. Регулировка ширины импульса с использованием напряжения модуляции постоянного тока.
Схема работает как простой компаратор, где отрицательный вход операционного усилителя подключен к
сигнал несущей, в то время как положительный вход действует как пороговое напряжение, которое устанавливает, когда происходят переходы между выходом высокого напряжения и выходом низкого напряжения. Потенциометр действует как делитель напряжения для входного опорного напряжения, регулируя пороговое напряжение и косвенно рабочий цикл выходного сигнала.
Настройка оборудования
Постройте следующую макетную схему для управления шириной импульса, используя напряжение модуляции постоянного тока.
Рисунок 6. Регулировка ширины импульса с помощью модуляции постоянного напряжения — схема макетной платы.
Процедура
Используйте первый генератор сигналов в качестве источника Vin для подачи в схему возбуждения треугольной волны амплитудой 5 В от пика до пика, 1 кГц . Используйте второй генератор сигналов в качестве источника постоянного напряжения с размахом амплитуды 5 В.Подайте на операционный усилитель + 5В от источника питания. Настройте осциллограф так, чтобы входной сигнал отображался на канале 1, а выходной сигнал отображался на канале 2.
Анимированный сюжет представлен на рисунке 7.
Рисунок 7. Регулировка ширины импульса с использованием модуляции постоянного тока. Напряжение — формы сигналов.
Выходной сигнал представляет собой ШИМ-представление входного напряжения. Обратите внимание, что при изменении значения потенциометра рабочий цикл сигнала изменяется, а частота остается постоянной.
Фиксированная 50% ШИМ с нестабильным мультивибратором
Фон
Рассмотрим схему на рисунке 8.
Рисунок 8. ШИМ с нестабильным мультивибратором.
На схеме показан нестабильный мультивибратор на одном операционном усилителе. Функциональность легко понять при рассмотрении функционального принципа триггера Шмитта (схема компаратора с гистерезисом изучается в Activity: Op Amp as Comparator):
Вход триггера Шмитта, идентичный инвертирующему входу операционного усилителя, подключен к выходу схемы через резисторно-конденсаторную цепь.В то время как напряжение конденсатора (которое также является входом триггера Шмитта) ниже нижнего порога, выходное напряжение равно положительному напряжению питания схемы. Теперь конденсатор заряжается через резистор R 3 , пока не будет достигнут верхний порог срабатывания триггера Шмитта. В результате выходное напряжение операционного усилителя становится отрицательным. Теперь конденсатор разряжается через R 3 , пока напряжение на этом устройстве не достигнет нижнего порога срабатывания триггера Шмитта.Выходное напряжение операционного усилителя приводится к положительному напряжению питания, и весь процесс начинается снова.
Преимущество этой схемы в том, что ей не требуется M2K для генерации несущей (но рабочий цикл фиксирован на уровне 50%).
Настройка оборудования
Постройте следующую макетную схему для ШИМ с нестабильным мультивибратором.
Рисунок 9. ШИМ с нестабильной макетной платой мультивибратора.
Процедура
Подайте в цепь +/- 5В от источника питания.Настройте осциллограф так, чтобы выходной сигнал отображался на канале 1.
График с выходным сигналом на канале 1 осциллографа представлен на рисунке 10.
Рисунок 10. Форма выходного сигнала ШИМ с нестабильным мультивибратором.
Обратите внимание, что рабочий цикл выходного сигнала составляет примерно 50%, в то время как значения низкого / высокого напряжения имеют тенденцию достигать положительных / отрицательных значений питания.
В предыдущем примере мы сгенерировали ШИМ с фиксированным рабочим циклом 50% с использованием нестабильных мультивибраторов.Но как мы можем отрегулировать рабочий цикл? Для этого нам нужно будет немного изменить схему.
Рассмотрим схему, представленную на рисунке 11.
Рисунок 11. Регулировка рабочего цикла ШИМ с мультивибратором.
Резистор R 3 на рисунке 8 был заменен потенциометром и вставлены два диода. Теперь зарядный ток конденсатора проходит через D 1 , а разрядный ток проходит через D 2 .В зависимости от настройки потенциометра VR 1 сопротивление зарядного тока, проходящего через верхнюю ветвь цепи, отличается от сопротивления разрядного тока, проходящего через нижнюю ветвь.
Настройка оборудования
Создайте следующую макетную схему для регулировки рабочего цикла ШИМ с мультивибраторами.
Рисунок 12. Регулировка рабочего цикла для ШИМ с макетной схемой мультивибратора.
Процедура
Подайте в цепь +/- 5В от источника питания.Настройте осциллограф так, чтобы выходной сигнал отображался на канале 1, а напряжение на конденсаторе (на отрицательном входе операционного усилителя) отображалось на канале 2.
Измените значение потенциометра и обратите внимание на изменение рабочего цикла. Пример графика представлен на рисунке 13.
Рисунок 13. Регулировка рабочего цикла ШИМ с нестабильными формами сигналов мультивибратора.
В этом примере рабочий цикл был установлен примерно на 25%. Всякий раз, когда рабочий цикл изменяется, неизбежно происходит небольшое изменение частоты переключения, потому что две цепи связи на инвертирующем и неинвертирующем входе обе подключены к выходу операционного усилителя.
Продолжаем работу с лабораторией
Вся деятельность в этой лаборатории основана на простом операционном усилителе (OP97), сконфигурированном как компаратор. В комплект деталей ADALP2000 входит также компаратор AD8561, предназначенный для этой единственной цели. Следовательно, производительность схем ШИМ может быть увеличена с помощью этой части.
Постройте описанные выше схемы, используя AD8561 из набора деталей, и обсудите любые заметные изменения поведения схемы и входных / выходных сигналов.
Дополнительная литература
часто задаваемых вопросов: широтно-импульсная модуляция (ШИМ)
Какова цель широтно-импульсной модуляции (ШИМ)?
В импульсных преобразователях
используется силовой полупроводниковый переключатель (обычно MOSFET) для управления магнитным элементом (трансформатором или катушкой индуктивности), выпрямленный выход которого создает постоянное напряжение. Обычно КПД превышает 90%, что примерно вдвое выше, чем у линейного регулятора.
Импульсный преобразователь изменяет свой выходной постоянный ток в ответ на изменения нагрузки.Одним из широко используемых подходов является широтно-импульсная модуляция (ШИМ), которая управляет выходной мощностью переключателя питания, изменяя время его включения и выключения. Отношение времени включения к времени периода переключения — это рабочий цикл. На рис. 1 показаны три различных варианта рабочего цикла ШИМ: 10%, 50% и 90%. Рабочий цикл и мощность редко имеют какое-либо отношение друг к другу. Вместо этого рабочий цикл регулируется для регулирования выходного напряжения.
На рис. 2 показан упрощенный ШИМ-контроллер, используемый в импульсном преобразователе.Во время работы часть выходного постоянного напряжения возвращается в усилитель ошибки, что заставляет компаратор управлять временем включения и выключения ШИМ. Если отфильтрованный выходной сигнал силового полевого МОП-транзистора изменяется, обратная связь регулирует рабочий цикл для поддержания выходного напряжения на желаемом уровне.
Для генерации сигнала ШИМ усилитель ошибки принимает входной сигнал обратной связи и стабильное опорное напряжение для создания выходного сигнала, соответствующего разнице двух входов. Компаратор сравнивает выходное напряжение усилителя ошибки с линейным нарастанием (пилообразной кривой) генератора, создавая модулированную ширину импульса.. Выход компаратора применяется к логической схеме переключения, выход которой поступает на выходной драйвер для внешнего силового полевого МОП-транзистора. Логика переключения обеспечивает возможность включения или отключения сигнала ШИМ, подаваемого на силовой полевой МОП-транзистор.
Почему схема ШИМ нуждается в компенсации крутизны?
Рабочие циклы ШИМ выше 50% требуют компенсационного линейного изменения, называемого компенсацией наклона, чтобы избежать нестабильности. Более высокие рабочие циклы требуют еще большей компенсации крутизны. То есть, если переключатель PWM включен более чем на 50% периода переключения, необходимо использовать компенсацию крутизны для поддержания стабильности системы.При традиционной компенсации крутизны переключающий преобразователь может стать нестабильным для рабочих циклов, приближающихся к 100%, поэтому необходимо использовать специальную компенсацию крутизны. На рисунке 3 показан ШИМ-контроллер, который использует компенсацию наклона.
Схема блокировки пониженного напряжения (UVLO) устанавливает рабочий диапазон входного постоянного напряжения ШИМ-контроллера. Есть два порога UVLO. При превышении порога включения UVLO включается ШИМ-контроллер. Если входное напряжение постоянного тока падает ниже порога отключения UVLO, ШИМ-контроллер выключается.
Контроллеры
PWM могут иметь несимметричные или сдвоенные выходы. Типы с двумя выходами предназначены для двухтактных, мостовых или синхронных выпрямительных МОП-транзисторов. В этих конфигурациях контроллер ШИМ должен либо точно установить мертвое время двух выходов, либо предотвратить их перекрытие. Если оба выхода могут быть включены одновременно, это приведет к увеличению рассеиваемой мощности и электромагнитных помех. Некоторые контроллеры PWM включают специальные схемы для управления мертвым временем или перекрытием.
Большинство микросхем ШИМ-контроллеров обеспечивают токоограничивающую защиту, измеряя выходной ток.Если вход считывания тока превышает определенный порог, он завершает текущий цикл (поцикловое ограничение тока).
Компоновка схемы имеет решающее значение при использовании резистора считывания тока, который должен быть типа с низкой индуктивностью. Найдите его и конденсатор фильтра считывания тока очень близко и подключите непосредственно к выводу PWM IC. Кроме того, все чувствительные к шуму соединения заземления малой мощности должны быть соединены вместе рядом с заземлением ИС, а одно соединение должно быть выполнено с заземлением питания (точка заземления сенсорного резистора).
В большинстве микросхем ШИМ-контроллеров частоту генератора задает один внешний резистор или конденсатор. Чтобы установить желаемую частоту генератора, используйте уравнение в таблице данных контроллера для расчета номинала резистора.
Некоторые преобразователи ШИМ включают возможность синхронизации генератора с внешними часами с частотой, которая либо выше, либо ниже частоты внутреннего генератора. Если синхронизация не требуется, подключите вывод синхронизации к земле, чтобы предотвратить шумовые помехи.
Функция плавного пуска позволяет преобразователю мощности постепенно достигать начальной установившейся рабочей точки, тем самым снижая пусковые напряжения и скачки напряжения. В большинстве ИС с ШИМ внешний конденсатор устанавливает время плавного пуска.
Высокоскоростной широтно-импульсный модулятор
MCP1631 и MCP1631V компании
Microchip Technology — это высокоскоростные аналоговые ШИМ. В сочетании с микроконтроллером MCP1631 / MCP1631V может управлять рабочим циклом системы питания, обеспечивая выходное напряжение или регулирование тока.Микроконтроллер можно использовать для регулировки выходного напряжения или тока, частоты переключения и максимального рабочего цикла, обеспечивая при этом дополнительные функции, делающие систему питания более интеллектуальной, надежной и адаптируемой.
MCP1631 (управление в режиме тока) и MCP1631V (управление в режиме напряжения) содержит ШИМ, драйвер MOSFET, усилитель считывания тока, усилитель считывания напряжения и компаратор перенапряжения. Эти ИС работают с входным напряжением от 3,0 В до 5,5 В. Дополнительные функции включают отключение, блокировку пониженного напряжения (UVLO) и защиту от перегрева.
Для приложений, которые работают от входа высокого напряжения, MCP1631HV и MCP1631VHV могут работать напрямую от входа от + 3,5 В до + 16 В. Для этих приложений доступен дополнительный регулируемый выход с низким падением напряжения + 5 В или + 3,3 В, который может обеспечивать ток до 250 мА для питания микроконтроллера и вспомогательных цепей
Внутренний ШИМ MCP1631 / MCP1631V состоит из усилителя ошибки, высокоскоростного компаратора и защелки. Выход усилителя сравнивается либо с MCP1631 CS (вход датчика первичного тока), либо с MCP1631V VRAMP (вход линейного изменения напряжения) высокоскоростного компаратора.Когда сигнал CS или VRAMP достигает уровня выходного сигнала усилителя ошибки, цикл включения завершается, и внешний переключатель блокируется до начала следующего цикла.
Среди типичных приложений для MCP1631 / MCP1631V можно назвать зарядные устройства с программируемым переключателем, способные заряжать различные химические соединения, такие как литий-ионные, никель-металлогидридные, никель-кадмиевые и свинцово-кислотные, сконфигурированные как одиночные или множественные элементы. Комбинируя с небольшим микроконтроллером, можно также разработать интеллектуальные светодиодные конструкции освещения и программируемые источники напряжения и тока топологии SEPIC.
Входы MCP1631 / MCP1631V могут быть подключены к контактам ввода / вывода микроконтроллера для гибкости проектирования. Дополнительные функции, интегрированные в MCP1631HV / MCP1631VHV, обеспечивают формирование сигнала и функции защиты для зарядных устройств или источников постоянного тока.
Контроллер повышения текущего режима
Показано на Рис. 3 — это контроллеры Texas Instruments TPS40210 и TPS40211 с широким входным напряжением (от 4,5 В до 52 В), несинхронные повышающие контроллеры.Они подходят для топологий, в которых требуется N-канальный полевой транзистор с заземленным источником, включая повышающий, обратный, SEPIC и различные приложения для драйверов светодиодов.
Особенности устройства включают программируемый плавный пуск, защиту от перегрузки по току с автоматическим повторным запуском и программируемую частоту генератора. Управление в текущем режиме обеспечивает улучшенную переходную характеристику и упрощенную компенсацию контура. Основное различие между этими двумя частями — это опорное напряжение, до которого усилитель ошибки регулирует вывод FB.
Резистор и конденсатор, подключенные к выводу RC, определяют частоту генератора. Конденсатор заряжается примерно до VVDD / 20 током, протекающим через резистор, а затем разряжается внутренним транзистором TPS40210. Вы можете синхронизировать TPS40210 и TPS40211 с внешними часами, частота которых должна быть выше, чем частота свободного хода преобразователя.
Контроллеры tps40210 и TPS40211 являются контроллерами режима тока и используют резистор, включенный последовательно с силовым полевым транзистором на клеммах источника, для измерения тока как для управления режимом тока, так и для защиты от перегрузки по току.Резистор считывания тока служит как ограничителем тока, так и датчиком управления режимом тока, поэтому его следует выбирать на основе как стабильности (ограничение управления в режиме тока), так и ограничения тока (ограничение устройства).
Стандартный повышающий преобразователь не имеет метода ограничения тока от входа к выходу в случае короткого замыкания на выходе. Если требуется защита от этого типа событий, необходимо использовать некоторую вторичную схему защиты.
Характеристикой режима управления пиковым током является состояние, при котором контур управления током становится нестабильным.Контур напряжения поддерживает регулирование, но пульсирующее напряжение на выходе увеличивается. и колеблется на половине частоты переключения.
Для исправления этого состояния необходимо применить компенсирующую рампу от генератора к сигналу, идущему на широтно-импульсный модулятор. В TPS40210 / 11 пилообразный сигнал генератора применяется в фиксированной величине к широтно-импульсному модулятору. Чтобы преобразователь не перешел в субгармоническую нестабильность, крутизна сигнала линейного нарастания компенсации должна составлять не менее половины спада сигнала линейного нарастания тока.Поскольку компенсационная рампа является фиксированной, она накладывает ограничение на выбор резистора считывания тока. Наклон компенсации крутизны должен быть не менее половины, а предпочтительно равным крутизне спада формы сигнала измерения тока, наблюдаемой на широтно-импульсном модуляторе.Максимальное значение устанавливается на резистор измерения тока при работе в непрерывном режиме с коэффициентом заполнения 50% или больше.
В целях проектирования следует применить некоторый запас к фактическому значению резистора считывания тока.В качестве отправной точки фактический выбранный резистор должен быть на 80% или меньше, чем номинал резистора, который делает линейную кривую компенсации крутизны равной половине крутизны спада тока.
Синхронный понижающий ШИМ-контроллер постоянного тока
ADP1828 — это универсальный синхронный понижающий контроллер напряжения с ШИМ-режимом. Он управляет N-канальным силовым каскадом для регулирования выходного напряжения от 0,6 В до 85% входного напряжения и рассчитан на работу с большими МОП-транзисторами для стабилизаторов точки нагрузки.ADP1828 идеально подходит для широкого спектра приложений с высоким энергопотреблением, таких как питание ввода-вывода DSP и ядра процессора, а также универсальное питание в телекоммуникациях, медицинской визуализации, ПК, играх и промышленных приложениях.
Показанный на рис. 4 , ADP1828 работает от входных напряжений смещения от 3 до 18 В с внутренним LDO, который генерирует выходное напряжение 5 В для входных напряжений смещения более 5,5 В. Цепи управления, драйверы затворов и Внешний повышающий конденсатор работает от выхода LDO для входа между 5.5 В и 18 В. PV питает привод затвора нижнего полевого МОП-транзистора (DL), а IN питает внутреннюю схему управления. Подключите PV к PGND с конденсатором 1 мкФ или более, а от IN к GND с конденсатором 0,1 мкФ или более. Обойдите вход питания в PGND с помощью конденсатора подходящей емкости.
Частота коммутации также может быть синхронизирована с внешними часами до двухкратной номинальной частоты генератора. Выход часов можно использовать для синхронизации дополнительных ADP1828 (или контроллеров ADP1829), что устраняет необходимость во внешнем источнике синхронизации.
ADP1828 включает в себя защиту плавного пуска для ограничения любого пускового тока от входного источника питания во время запуска, защиту от обратного тока во время плавного пуска для предварительно заряженного выхода, а также регулируемую схему ограничения тока без потерь с использованием внешнего датчика MOSFET RDS (ON). . Для приложений, требующих упорядочивания источников питания, ADP1828 предоставляет отслеживающий вход, который позволяет отслеживать выходное напряжение во время запуска, выключения и отказов. Дополнительные функции контроля и управления включают тепловую перегрузку, блокировку при пониженном напряжении и исправное энергопотребление.
ADP1828 работает в диапазоне температур перехода от -40 ° C до + 125 ° C и доступен в 20-выводном корпусе QSOP
Введение в ШИМ (широтно-импульсная модуляция)
Привет, ребята! Добро пожаловать на борт. Сегодня я буду обсуждать важную тему под названием «Введение в ШИМ» . Я постараюсь охватить все, что связано с ШИМ, то есть определение ШИМ, генерация ШИМ, зачем нам нужны сигналы ШИМ? как он используется в различных областях, начиная от двигателей, систем отопления, гидравлики, регулирующих клапанов, насосов и т. д.Здесь следует упомянуть одну важную вещь: «ШИМ может применяться как к электрическим сигналам переменного, так и постоянного тока». Итак, приступим:
Что такое ШИМ (широтно-импульсная модуляция)?
Как мы все знаем, существует два основных типа электрических сигналов: переменный и постоянный ток. Оба этих сигнала используются в качестве источника питания для различных типов электроприборов. Теперь, если мы посмотрим на эти электрические приборы, они работают на разных уровнях напряжения и могут также нуждаться в источнике переменного напряжения (как в диммерах вентилятора).Таким образом, возникла необходимость в создании источников переменного напряжения с минимальными потерями мощности, поскольку другие методы (например, понижающие трансформаторы и т. Д.) Рассеивают энергию и, следовательно, не столь эффективны. Для достижения переменных уровней напряжения были разработаны различные методы, и один из них называется ШИМ (аббревиатура от широтно-импульсной модуляции), который считается наиболее эффективным.
- В ШИМ мы просто включаем и выключаем наш источник питания через равные промежутки времени и, таким образом, уменьшаем среднюю мощность сигнала.
- Как показано на рисунке ниже (A), я взял сигнал 5 В постоянного тока и разделил его на три равных интервала, каждый из которых представляет один цикл.
- На рисунке (B) для каждого цикла питание включено в первой половине и выключено во второй половине.
- Итак, мы можем сказать, что мы просто переключаем наш источник постоянного тока через равные промежутки времени (в данном случае интервал составляет 50%).
- Если мы выполним это переключение с помощью ручного переключателя (который должен быть очень медленным), мы получим 5 В, когда переключатель включен, и 0 В, когда переключатель выключен, схема показана на рисунке (D).
- Но, если мы заменим этот ручной переключатель автоматическим переключателем (например, МОП-транзисторы, IGBT, полевые транзисторы и т. Д.), Мы сможем добиться быстрого переключения в диапазоне наносекунд.
- Это быстрое переключение электрического сигнала снизит его среднюю мощность, но выходная мощность останется непрерывной, и для 50% цикла ВКЛ / ВЫКЛ выходной сигнал 5 В будет около 2,5 В, как показано на рисунке (C).
- На рисунке (C) выходной сигнал показан синим цветом, который составляет 2,5 В, но фактический сигнал ШИМ включается / выключается и показан оранжевым цветом.
- Процент, в течение которого сигнал остается в состоянии ВКЛ в течение одного цикла, называется рабочим циклом (мы обсудим его подробно позже).
- В приведенном выше примере рабочий цикл волны ШИМ составляет 50%, поэтому его выходная мощность составляет ровно половину, поскольку мы отключаем его на оставшиеся 50%.
Теперь давайте посмотрим на правильное определение широтно-импульсной модуляции:
Определение PWM
- PWM (сокращение от Pulse Width Modulation) — это метод модуляции, используемый для понижения уровня напряжения (средней мощности) электрических сигналов (как переменного тока, так и переменного тока). & DC), изменяя их ширину (продолжительность включения) с помощью быстрого переключения.
- Если источник напряжения
ШИМ в сигналах постоянного тока
Предположим, у нас есть источник питания 12 В постоянного тока, но мы хотим управлять нагрузкой постоянного тока 5 В, скажем, светодиодом RGB, как показано на рисунке ниже. В схеме А есть ручной переключатель, если мы быстро включим и выключим этот переключатель. через равные промежутки времени на выходе мы будем получать либо 12 В, либо 0 В, и светодиод также будет включаться или выключаться, и есть вероятность, что он может перегореть. Но если мы заменим этот ручной переключатель автоматическим переключателем, то есть транзистором (как в схеме B), то мы сможем добиться точного и быстрого переключения.Это быстрое переключение будет делать то же самое, то есть включать и выключать электрический сигнал, но оно будет делать это переключение за наносекунды, что снизит среднюю мощность электрического сигнала, но выход останется непрерывным. Таким образом, если транзистор включен и выключен в течение равного времени, выходной сигнал снизится с 12 В до 6 В, и светодиод будет гореть. Но если вы хотите быть точным и хотите сгенерировать точный выход 5 В, тогда мы должны еще больше уменьшить период включения транзистора, что, в свою очередь, уменьшит выход.Двумя основными факторами ШИМ являются:
- Частота переключения.
- Рабочий цикл.
Частота переключения
Частота (или скорость), с которой работает транзистор, называется частотой переключения. Обычно для генерации импульса ШИМ используются микроконтроллеры, но в небольших схемах также используется таймер 555. Обычный 8-битный микроконтроллер может генерировать импульс ШИМ в диапазоне от 4 МГц до 80 МГц, скажем, если мы генерируем импульс ШИМ с частотой 20 МГц:
t = 1 / f
t = 1/20 МГц
t = 0.066us
Итак, период времени одного импульса ШИМ составляет 0,066 мксек, вот насколько быстро он переключается.
Рабочий цикл
В одном цикле импульса PWM период включения называется рабочим циклом. Итак, если транзистор переключается на 50%. Если вы когда-либо работали с двигателем постоянного тока, вы, должно быть, заметили, что его скорость изменяется при изменении его входное напряжение. Если я работаю с двигателем постоянного тока 12 В, и он вращается со скоростью 500 об / мин (скажем), поэтому, если я уменьшу его напряжение с 12 В до 6 В, его частота вращения снизится с 500 об / мин до 250 об / мин (в идеале).В методе ШИМ электрические сигналы проходят через устройство быстрой коммутации (например, полевые транзисторы, полевые МОП-транзисторы, IGBT-транзисторы и т. Д.), Эти транзисторы запрограммированы на прерывание электрического сигнала через равные промежутки времени. ШИМ — это процесс, в основном используемый для получения аналогового сигнала. используя цифровой источник.
- Это не что иное, как контроллер, который контролирует и обрабатывает входной ток, подаваемый на нагрузку.
ШИМ варьируется между высокими и низкими значениями, где высокое значение указывает, приложено 5 В, а низкое значение, указывающее, что сигнал заземления приложен к нагрузке. Примечание: Не обязательно, верхнее значение соответствует 5 В, это может быть любое значение в зависимости от напряжения, при котором работает нагрузка. Я упомянул 5 В, чтобы дать вам представление о том, как ШИМ переключается между высокими и низкими значениями. ШИМ работает как управляемый переключатель, который в основном управляет током, подаваемым на нагрузку. Когда переключатель выключен, это означает, что для нагрузки нет тока, а когда переключатель включен, это означает, что мощность подается на нагрузку без падения напряжения.Контроллеры PWM в основном используются там, где нам нужно свести потери мощности к минимуму, подавая питание на нагрузку импульсами, а не непрерывно.
- Метод ШИМ можно легко определить в терминах рабочего цикла и частоты , необходимого для повторения рабочего цикла в секунду. Рабочий цикл указывает количество времени, в течение которого сигнал переключается между положениями ВКЛ и ВЫКЛ. Он описывается в процентах. Если сигнал остается включенным половину полного рабочего цикла и остается выключенным в другой половине, то рабочий цикл будет составлять 50%.
На следующем рисунке показан рабочий цикл в процентах, который в основном связывает цифровые сигналы ВКЛ и ВЫКЛ на осциллограмме.
- ШИМ контролирует рабочий цикл сигнала, который, следовательно, регулирует скорость двигателя.
Если частота рабочего цикла составляет 50 Гц, это означает, что 50 рабочих циклов завершаются в секунду, называя соотношение, насколько быстро он регулируется между высокими и низкими значениями.
- Частота, необходимая для процесса ШИМ, будет варьироваться в зависимости от характера приложений.Некоторым требуется быстрый рабочий цикл для управления нагрузкой в более быстром темпе, в то время как некоторым требуется низкий рабочий цикл, чтобы поддерживать плавный процесс и избегать потерь мощности. Чаще всего время отклика нагрузки задает путь для частоты, необходимой для ШИМ.
Важно отметить, что скорость двигателя прямо пропорциональна продолжительности рабочего цикла, при котором сигнал остается включенным. Чем больше продолжительность сигнала ВКЛ, тем быстрее будут вращаться клеммы двигателя. Аналогично, длительность ВЫКЛ приведет к снижению скорости двигателя.
- Использование ШИМ для управления двигателем имеет преимущество перед простым изменением аналогового сигнала на двигатель. Поскольку аналоговый сигнал подает мощность на двигатель с непрерывным изменением, не удается удерживать клеммы двигателя полностью выключенными или включенными, в результате во время этого процесса происходит потеря мощности, однако ШИМ подает мощность в импульсах, которые удерживают клеммы двигателя либо в полностью включенном или выключенном состоянии.
Светодиод Пример
Управление светодиодом RGB — прекрасный пример понимания концепции ШИМ.Изменяя продолжительность включения каждого цвета и экспериментируя с их яркостью, вы каждый раз будете получать определенный цвет. Избегайте настройки продолжительности включения с одинаковой величиной для каждого цвета, это даст белый свет.
Если вы используете красный свет с рабочим циклом 10% на скорости 2 МГц, то большую часть времени красный свет будет выключен, как вы видите. Да, он включится на короткое время, но похоже, что он не участвует во вспышке, создаваемой светодиодом RGB. Точно так же применение красного света с рабочим циклом 10% на частоте 100 МГц увеличит долю красного света при включении светодиода скорость будет выше, чем при использовании с более низкой частотой.
Материнская плата компьютера
Материнская плата компьютера — еще один пример, которому для работы вентилятора требуются сигналы ШИМ с импульсами питания. Если питание подается постоянно без ШИМ, это может серьезно повредить плату, так как плата будет работать на полной скорости без каких-либо пауз. Импульсы питания удерживают плату в постоянном цикле, при котором сигналы питания подаются в быстрой последовательности, которая не выключайте вентилятор. Если вы покупаете новый компьютер, вы можете заметить, что к вентилятору добавлен 4-контактный разъем PWM, который контролирует процесс охлаждения платы.Здесь стоит упомянуть, что ШИМ, генерируемый с наклонным рабочим циклом, предпочтительнее генерации с плоским. Поскольку последний более уязвим для создания звука щелчка, когда вентилятор работает на низкой скорости. Точно так же, когда рабочий цикл приближается к 100%, вентилятор будет работать на полной скорости, создавая неприятный тикающий звук. Чтобы уменьшить мешающий звук, некоторые качественные вентиляторы поставляются с микросхемами привода IC, что позволяет вентилятору работать плавно, не создавая никаких помех. звук. Вам могут потребоваться дополнительные деньги для покупки качественных вентиляторов PWM, которые не только сохранят качество, но и помогут увеличить общий срок службы платы.
Применения
- Двигатели постоянного тока и серводвигатели
- Системы отопления,
- Гидравлика
- Регулирующие клапаны,
- Насосы
- Телекоммуникации
- Компьютерные приложения
Это все на сегодня. Надеюсь, эта статья оказалась для вас полезной.