Для чего нужен угломер — Морской флот
В специализированном строительном магазине можно встретить просто огромное количество различных измерительных инструментов, применимых при проведении работ. Примером можно назвать угломер, который позволяет замерить угол наклона и многие другие показатели. Подобный измерительный прибор характеризуется большим количеством различных особенностей, о которых далее поговорим подробнее.
Угломер: устройство и назначение
Механический и иной вариант исполнения угломеров предназначен для измерения углов. При этом поверхности, образующие его, могут находится в различных плоскостях. В продаже встречаются и оптические варианты исполнения, способные проводить замеры удаленно.
Большое распространение получил угломер механический. Для его применения достаточно приложить к поверхности. Контактный способ достаточно прост и практичен, но не всегда применим. Примером можно назвать ландшафтные работы.
Оптический метод позволяет проводить замеры даже в случае нахождения относительно далеко от исследуемого объекта. Современные варианты исполнения могут выводить информацию на дисплее, то есть ничего рассчитывать не приходится.
Устройство оптического угломера
Самый простой угломерный инструмент характеризуется следующими особенностями:
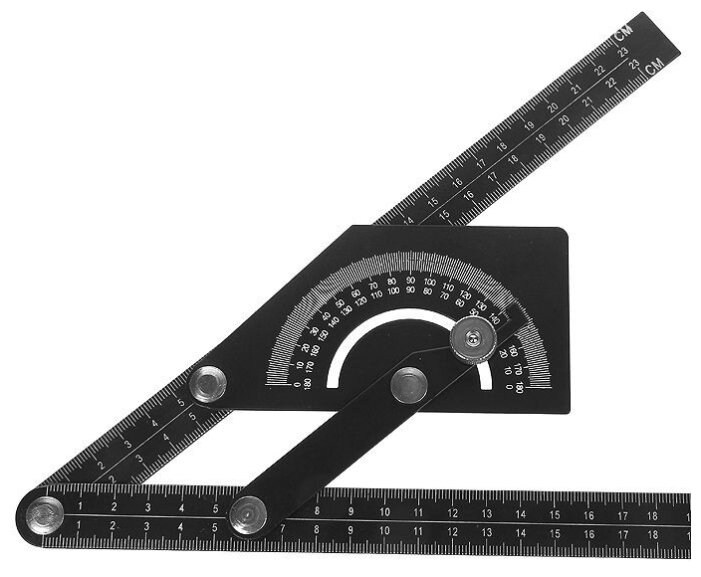
- При измерении используется две обычные линейки, которые на поверхности имеют шкалы.
- Линейки выставляются по углу, после чего проводится снятие показателей.
При проведении столярных работ часто используются жесткие угломеры. Они позволяют быстро задать наиболее часто применяемые показателя, к примеру, 90 или 45, 30°.
Виды инструмента для измерения углов
Измеритель углов используется при проведении самых различных работ. Выделяют следующие группы инструментов:
- Строительный уровень получил самое широкое распространение.
 Уровень, который основан на изменении воздушного шарика в жидкости, применяется в течение многих лет. Однако, снимаемые показатели нельзя назвать точными.
Уровень, который основан на изменении воздушного шарика в жидкости, применяется в течение многих лет. Однако, снимаемые показатели нельзя назвать точными. - Слесарный механический угломер также встречается крайне часто. В данной сфере наибольшее распространение получили шаблоны, за счет которых ускоряется производственный процесс.
- Угломер оптический применяется при ландшафтных работах. Он позволяет получить точные данные за минимальный промежуток времени.
- В топографии используется механический угломер-транспортир. Он хорошо проявляет себя при работе с картами. Его точность относительна.
 Уровень, который основан на изменении воздушного шарика в жидкости, применяется в течение многих лет. Однако, снимаемые показатели нельзя назвать точными.
Уровень, который основан на изменении воздушного шарика в жидкости, применяется в течение многих лет. Однако, снимаемые показатели нельзя назвать точными.Сферы применения современных угломеров практически безграничны.
В последнее время большое распространение получили лазерные установки. Они способны в минимальный срок замерять не только углы, но и другие размеры. При этом погрешность может составить всего несколько сотых долей миллиметра и меньше.
Механический измеритель углов — что это?
Самым доступным вариантом исполнения можно назвать механические угломеры. Они позволяют получить точные данные, но характеризуются меньшей точностью. При выборе угломера уделяется внимание следующим моментам:
- Какой нормативный документ использовался в качестве стандартов при изготовлении.
- Какова точность инструмента для измерения углов.
- Особенности эксплуатации устройства.
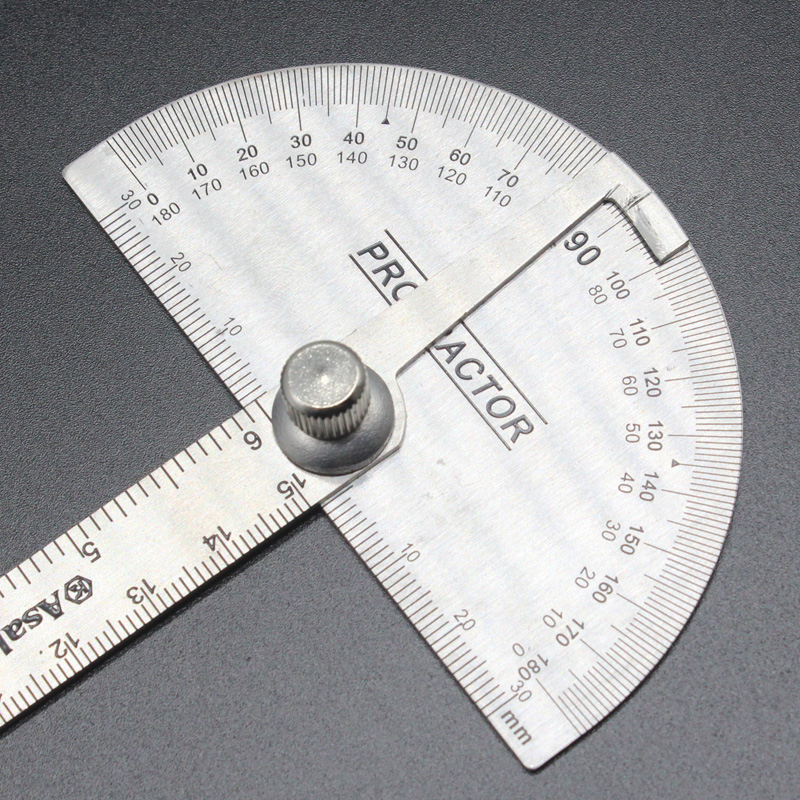
В продаже встречаются различные варианты исполнения механических измерительных приборов, большое распространение получил угломер строительный. Нониусный тип представлен следующей конструкцией:
- Корпус.
- Диск, зафиксированный на гайке.
- Основание с шкалой и нониусом.
- Линейка и хвостовик.
Оптические варианты исполнения характеризуются более сложной конструкцией. В отдельную группу можно отнести механизмы, которые по факту являются шаблонами.
Как пользоваться угломером: примерный принцип действий
Только при правильном применении устройства можно рассчитывать на то, что снимаемые показатели будут точными. Меньше всего проблем с тем, как пользоваться угломером возникает в случае применения автоматизированного устройства. Примером можно назвать лазерные установки: их достаточно установки в нужном месте включить и подождать некоторое время для считывания информации. С механическими приборами все немного сложнее.
Меньше всего проблем с тем, как пользоваться угломером возникает в случае применения автоматизированного устройства. Примером можно назвать лазерные установки: их достаточно установки в нужном месте включить и подождать некоторое время для считывания информации. С механическими приборами все немного сложнее.
Замер при помощи угломера
Нониусный вариант исполнения применяется крайне часто. Рекомендации по его применению следующие:
- Механизм прикладывается к измеряемой поверхности, линейка и корпус должны прилегать плотно.
- По основной шкале считаются градусы вплоть до того момента, пока не будет достигнут уровень нуля на нониусе.
- Далее нужно двигаться по шкале по нониусу, пока не достигается деление основной шкалы. Подобным образом определяются минуты.
Стоит учитывать, что снимаемые показатели могут существенно отличаться в зависимости от точности используемого механического угломера.
Оптический применяется следующим образом:
- Линейка перемещается так, чтобы она вместе с подвижным элементом образовали искомый угол.
- Для фиксации устройства применяется специальное кольцо. Кроме этого, он должен быть надежно установлен на основании. Малейшее смещение может привести к серьезным погрешностям.
- Диск и лупа механизма зависят от положения подвижной линейки. Этот элемент применяется в качестве своеобразного индикатора, который и применяется для получения требуемого значения.
- Лупа применяется для наблюдения за искомым значением. Она совмещается со специальной отметкой на пластине. Подобным образом вычисляется показатель.
Применение строительного уровня
Электронные и лазерные, механические измерительные приборы требуют бережного обращения. Сильный удар и несвоевременное обслуживание может привести к тому, что они начнут работать неправильно. Кроме этого, время от времени рекомендуется выполнять калибровку всех механизмов.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Угломерами называют специализированные приборы для измерения углов с высокой точностью. Они широко используются при проведении строительных, инженерных, слесарных, ремонтных и прочих, в том числе узкоспециализированных работ.
Например, угломер для затяжки болтов нужен для установки точного угла затяжки крепежных элементов и обеспечения максимальной герметичности соединений. Квадранты используются в астрономии и при ведении артиллерийского огня. Строительные модели применяются во время проектных, разметочных и монтажных работ. Кстати, интересный факт: более распространенное название прибора для высокоточной затяжки болтов — лимб, а квадрантом также называют четверть круга.
Прежде чем выяснять, как измерять угол этим прибором, стоит разобраться в его типах и особенностях конструкции. Например, работа устройства с нониусом отличается от работы электронных устройств.
Виды угломеров
По особенностям конструкции и принципу работы модели приборов можно разделить:
- на электронные, они же цифровые. Эти устройства точные, работать с ними очень легко. На лицевой части прибора расположен дисплей, на котором отображаются показания. Также такие устройства могут иметь дополнительные функции;
- лазерные. Такие устройства вместо подвижной механической части используют направление луча на нужную точку. Минус такого оборудования — лазерный указатель сложно увидеть невооруженным глазом. Для этого используются дополнительные приемники, обеспечивающие точное наведение на цель;
- маятниковые. Такие приборы предназначены для точных измерений в инструментальном производстве. Во время работы шкала остается неподвижной, перемещается стрелка, которая устанавливается на противовес;
- оптические. Яркий представитель таких угломеров — тахеометр. Отличить подобные приборы можно по так называемому «глазку» — оптической линзе, которая используется при проведении измерений;
- механические. Модели с нониусом более точны, но требуют понимания принципа и особенностей работы;
- шаблоны. Представляют собой изделия с фиксированными углами. Они используются для настройки других инструментов и быстрого проведения стандартных измерений. Шаблоны бывают на 30, 45, 90 и более градусов.
 Модели с нониусом более точны, но требуют понимания принципа и особенностей работы;
Модели с нониусом более точны, но требуют понимания принципа и особенностей работы;Как измерять угломером в зависимости от его типа?
Рассмотрим самые распространенные и эксплуатируемые виды приборов, с которыми пользователь столкнется в 95 % случаев.
- Электронные. Автоматизированные приборы самые простые и удобные в применении. Для их эксплуатации не понадобятся особые знания или навыки — справится даже новичок. Для проведения измерений достаточно расположить прибор под исследуемым углом, и результат сразу появится на дисплее. В зависимости от модели приборы имеют ряд дополнительных функций (например, запоминание угла или передачу значений на ПК).
- С нониусом. Прибор устанавливают на плоскости так, чтобы искомый угол совпадал с корпусом и линейкой инструмента. Отсчитываются деления по основной шкале до тех пор, пока не будет достигнут уровень нуля на нониусе. Таким образом находят градусы. Далее продвигаются уже по шкале самого нониуса, пока не дойдут до деления, совпадающего с делением основной шкалы и продлевающего его в одну прямую линию. Таким образом определяются угловые минуты. В зависимости от класса точности оборудования значения шкал могут различаться, так что перед работой стоит изучить паспорт инструмента.
- Оптические. Передвижную линейку прибора перемещают так, чтобы совместно с основанием они образовали искомый угол. После этого фиксируется зажимное кольцо устройства, что гарантирует точность измерения и неизменность положения его составляющих. Положения лупы и диска этого механизма зависят от положения подвижной линейки. Они являются своеобразным индикатором искомого значения. При помощи лупы наблюдают отметку на диске и соотносят ее с отметкой на пластине, вычисляя таким образом показание прибора.
Эффективное обращение с нониусными и оптическими инструментами требует от пользователя понимания их принципа действия и нарабатываемых профессиональных навыков.
В архитектуре и строительстве, вне зависимости от эпохи, всегда огромное внимание уделялось и продолжает уделяться до геометральности пространства – всё должно быть ровно и аккуратно. Причина этому – подавляющее большинство мебели и другого содержимого интерьера, для установки которых необходимы идеально ровные стены и углы. Например, погрешности при установке угловой ванны могут стать основанием для образования зазоров между стеной и устанавливаемым предметом, из-за чего впоследствии придется его какими-либо способами маскировать, но, в любом случае, это дополнительные издержки, ведь будет потеряно как время, так и деньги. Именно для избегания подобных ситуаций и существует угломер , речь о котором и пойдет в данной статье, а также о его разновидностях, отличиях в конструкции и принципе работы от аналогов. О том, как выбрать нужный Вам инструмент и максимально эффективно им воспользоваться, читайте в нашем материале.
Абсолютно все угломеры , тем или иным способом используемые в настоящее время, можно распределить по семи группам, и каждой группе будет присуща собственная, строго персональная специализация, что, в свою очередь, объясняет и специфическую конструкцию.
- Строительные угломеры. Используются для выполнения монтажных, разметочных, а также проектных работ. Строительные угломеры, в свою очередь, отличаются друг от друга по размерам и методу измерения углов. Например, для выполнения работ за пределами помещения, на улице (будь то разметка местности или для возведения фундамента), по большей части, применяется «тахеометр» (угломер, используемый в инженерии), а для установки малогабаритных конструкций используется реечный прибор, обладающий измерительной шкалой. Главное отличие строительного угломера – метраж мерных реек. В основном, их длина насчитывает более половины метра.
- Слесарные угломеры. Подобные инструменты используются для выполнения наиболее точных работ, которые требуют максимальной тщательности и педантичности.
- Плотницкие угломеры. Отличаются своей приблизительностью, предназначены для выполнения работ, связанных с деревом.
- Горные угломеры. Используются в работе маркшейдеров, которые с их помощью измеряют углы между предметами, удаленными друг от друга на значительное расстояние на местности.
- Астрономические угломеры. Обладают наивысшей точностью среди любых аналогов, здесь название говорит само за себя.
- Мореходные угломеры. С их помощью определяются широты на водном пространстве моря или океана.
- Артиллерийские угломеры. Устанавливаются на оружие, чтобы обеспечить максимально безошибочное наведение его на мишень.

Это далеко не все типы и разновидности угломеров , которые можно встретить в современном мире, здесь перечислены только самые основные. Существует еще большое количество других, гораздо реже используемых, но, тем не менее, абсолютно незаменимых в своей области инструментов.
Различия в конструкции и методах измерения
По таким параметрам, как конструкция , масштаб необходимых измерений (на местности или в помещении, на значительные расстояния или наоборот), принцип измерения и др., весь спектр имеющихся у человечества угломеров можно разделить на шесть основных видов , речь о которых пойдет ниже:
- Электронный или, иначе говоря, цифровой угломер . В таких угломерах главной вычислительной единицей являются полупроводники . Выделяются электронные угломеры по цифровому дисплею, отображающем все проводимые замеры. Благодаря небольшой погрешности данного прибора, его рекомендуется использовать при установке капитальных сооружений.
- Лазерный. Несмо тря на огромную вариативность внешнего исполнения подобных угломеров, технология работы у них общая. Она заключается в использовании двух оптических лучей , которые единовременно устремляются на две какие-либо точки. Диагностирование градуса угла может быть произведено как вручную (визуальным способом), так и автоматически (электронным). Несмотря на использование передовых лазерных технологий, у данного типа инструмента есть один существенный недостаток – при интенсивном дневном освещении лучи становятся менее заметными, то же самое относится и к цвету поверхностей – на темных поверхностях лучи лучше видны. Проблема с распознаванием лучей решается при помощи специализированных приемников, задачей которых является оповещать о правильном или неправильном направлении лучей угломера.
 Несмотря на использование передовых лазерных технологий, у данного типа инструмента есть один существенный недостаток – при интенсивном дневном освещении лучи становятся менее заметными, то же самое относится и к цвету поверхностей – на темных поверхностях лучи лучше видны. Проблема с распознаванием лучей решается при помощи специализированных приемников, задачей которых является оповещать о правильном или неправильном направлении лучей угломера.
Несмотря на использование передовых лазерных технологий, у данного типа инструмента есть один существенный недостаток – при интенсивном дневном освещении лучи становятся менее заметными, то же самое относится и к цвету поверхностей – на темных поверхностях лучи лучше видны. Проблема с распознаванием лучей решается при помощи специализированных приемников, задачей которых является оповещать о правильном или неправильном направлении лучей угломера.- Оптический. Их особенностью является оптическая линза (или «глаз»), с помощью которого происходит диагностирование градуса углов. Наиболее распространенный угломер такого типа – тахеометр .
- Маятниковый. Значительно распространены в области приборной промышленности, но, тем не менее, в строительстве также нашли свое призвание – с их помощью диагностируют угол, на градус которого отклоняется тот или иной сегмент сооружения от уровня горизонта. Такой угломер опирается на положение маятника, главная задача которого – беспрестанно находиться на собственном месте относительно значения притяжения земли. Довольно часто такой инструмент называют гироскопом .
- Механический. Все угломеры этого вида делятся на два основных типа – угломеры простые и угломеры со шкалой . Чтобы произвести безошибочные замеры с помощью данного инструмента, необходим тесный контакт угломера с обеими гранями диагностируемого угла, поэтому его относят к группе контактных.
- Угломеры фиксированных углов. Данный инструмент относится к узкоспециальному классу, и в большей степени подходит под определение шаблона, чем под определение измерительного прибора. Особенностью является его способность диагностировать углы, величина которых определена (90 градусов, 60 градусов и т.д.).
Помимо всех вышеупомянутых видов и типов угломеров, достаточно популярен и занимает значимое положе ние угломер универсальный , предна значение которого заключается в повседневном контролировании осуществления работ, но и высокой безошибочностью не отличается. Но даже в ряду подобных универсальных приборов довольно часто встречаются комбинированные варианты, в функции которых входит диагностирование углов посредством совмещения различных способов в одном инструменте, и наиболее часто это либо гибрид лазерного и механического угломеров, либо электронные, которые возможно совместить почти с любым типом угломера.
Но даже в ряду подобных универсальных приборов довольно часто встречаются комбинированные варианты, в функции которых входит диагностирование углов посредством совмещения различных способов в одном инструменте, и наиболее часто это либо гибрид лазерного и механического угломеров, либо электронные, которые возможно совместить почти с любым типом угломера.
Торговая сеть «Планета Электрика» рада представить своим покупателям ассортимент угломеров, с которым более подробно можно ознакомиться в нашем каталоге .
Угломер: виды, характеристики и применение
Содержание:
Угломер: разновидности и особенности их конструкций
Различия угломера по типу устройства и принципу измерения
Как пользоваться угломером: принцип проведения измерений
В современном строительстве достаточно большое внимание уделяется так называемой геометрии пространства – в помещении все должно быть идеально ровно! Объясняется это тем, что большинство предметов интерьера для своей установки требует ровных стен и углов. Взять, к примеру, угловую ванну – что произойдет, если плиточник-облицовщик не выдержит угол в этом помещении 90˚? Зазор между стеной и ванной гарантирован, а маскировать его – это дополнительная трата времени и денег. В этой статье вместе с сайтом stroisovety.org мы подробно разберемся с таким инструментом, как угломер, ознакомимся с его разновидностями и научимся им пользоваться, ведь именно этот инструмент позволяет контролировать правильность углов в пределах необходимого значения.
Как выбрать угломер
Угломер: разновидности и особенности их конструкций
Все угломеры, которые так или иначе используются в современном мире, можно разделить по назначению на семь видов. Каждый из них имеет свою, сугубо индивидуальную специализацию и, соответственно, особую конструкцию.
- Угломер строительный. Применяется для производства монтажных, разметочных или проектных работ. Они могут различаться по габаритам и способу измерения углов – для проведения так называемых полевых работ, связанных с разметкой местности и закладкой фундамента, в большинстве случаев используется инженерный угломер под названием «тахеометр» (это разновидность оптических устройств), а для монтажа небольших конструкций применяется реечное устройство с измерительной шкалой. Основным отличием строительного угломера является длина обеих измерительных реек – как правило, она составляет не менее 0,5м.
Угломер строительный фото
- Слесарный угломер – его используют для производства тонких работ, отличающихся высокой точностью.
- Плотницкий угломер. Сугубо приблизительное устройство, предназначенное для работы с деревом.
- Горный угломер – используется маркшейдерами для измерения углов между удаленными на большое расстояние предметами на местности.
- Астрономический угломер – его название говорит само за себя. Его точность остается вне конкуренции.
- Мореходный угломер – используется для определения широты на морских и океанических просторах.
- Артиллерийский угломер – монтируется на оружие и позволяет производить его точное наведение на цель.
 Основным отличием строительного угломера является длина обеих измерительных реек – как правило, она составляет не менее 0,5м.
Основным отличием строительного угломера является длина обеих измерительных реек – как правило, она составляет не менее 0,5м.И это только основные виды угломера, наиболее часто встречающиеся в нашем мире. Кроме них существует и масса других, менее используемых, но в тоже время незаменимых в своей области подобных приборов.
Виды угломера
Различия угломера по типу устройства и принципу измерения
По своей конструкции и принципу производимых измерений все существующие угломеры можно разделить на шесть видов – это электронный угломер, лазерный, оптический, маятниковый, механический и угломер фиксированных углов. Рассмотрим их немного подробнее.
- Электронный угломер. Его еще называют цифровой угломер – принцип работы этого инструмента основан на действии полупроводников. Отличить такой угломер от всех других можно по наличию электронного табло, на которое выводятся результаты измерений. Это достаточно точный инструмент, который можно использовать для монтажа ответственных конструкций.
- Лазерный угломер. Имеет достаточно большое количество всевозможных конструкций, но все они работают по одному и тому же принципу – устройство излучает два луча, направляемые на две различные точки. Измерения угла могут производиться либо визуально, либо электронным способом. Недостатком этого современного угломера является проблема при работе в дневное время – луч лазера достаточно сложно уловить взглядом при ярком освещении. Исправить такое положение дел можно с помощью специальных приемников, которые сигнализируют о точном наведении луча в необходимую точку.
Лазерный угломер фото
- Оптические угломеры. Отличить их можно по наличию так называемого «глаза» – оптической линзе, используемой для проведения измерений. Ярким представителем подобных угломеров является тахеометр.
- Маятниковые угломеры. Получили широкое распространение в сфере инструментального производства, но и в строительстве для них имеется своя ниша – они с легкостью определяют угол отклонения того или иного элемента конструкции от уровня горизонта. Их принцип действия основан на работе маятника или, как его еще называют, гироскопа, который постоянно занимает свое место в соответствии с земным притяжением. По сути, шкала такого угломера остается неподвижной, а перемещается только стрелка, установленная на противоположном конце маятника.
Маятниковый угломер фото
- Механические угломеры. Подразделяются на два вида – простые и угломеры с нониусом. Этот инструмент относится к классу контактных – для измерения угловых значений требуется плотный контакт с двумя поверхностями измеряемого угла.
- Угломеры фиксированных углов. Это узкоспециализированный инструмент, позволяющий измерить угол определенной величины – с его помощью вы можете проконтролировать, к примеру, угол 90 или 30˚. Его в большей степени можно назвать шаблоном, чем измерительным инструментом.
 Недостатком этого современного угломера является проблема при работе в дневное время – луч лазера достаточно сложно уловить взглядом при ярком освещении. Исправить такое положение дел можно с помощью специальных приемников, которые сигнализируют о точном наведении луча в необходимую точку.
Недостатком этого современного угломера является проблема при работе в дневное время – луч лазера достаточно сложно уловить взглядом при ярком освещении. Исправить такое положение дел можно с помощью специальных приемников, которые сигнализируют о точном наведении луча в необходимую точку.Кроме вышеперечисленных разновидностей угломеров, существует и так называемый универсальный угломер – он предназначен для будничного контроля выполнения работ и особой точностью не отличается. И среди универсального инструмента этого типа достаточно часто можно встретить комбинированные разновидности, которые сочетают в себе несколько способов измерения углов – довольно распространенными конструкциями этого типа являются лазерно-механические угломеры или электронные.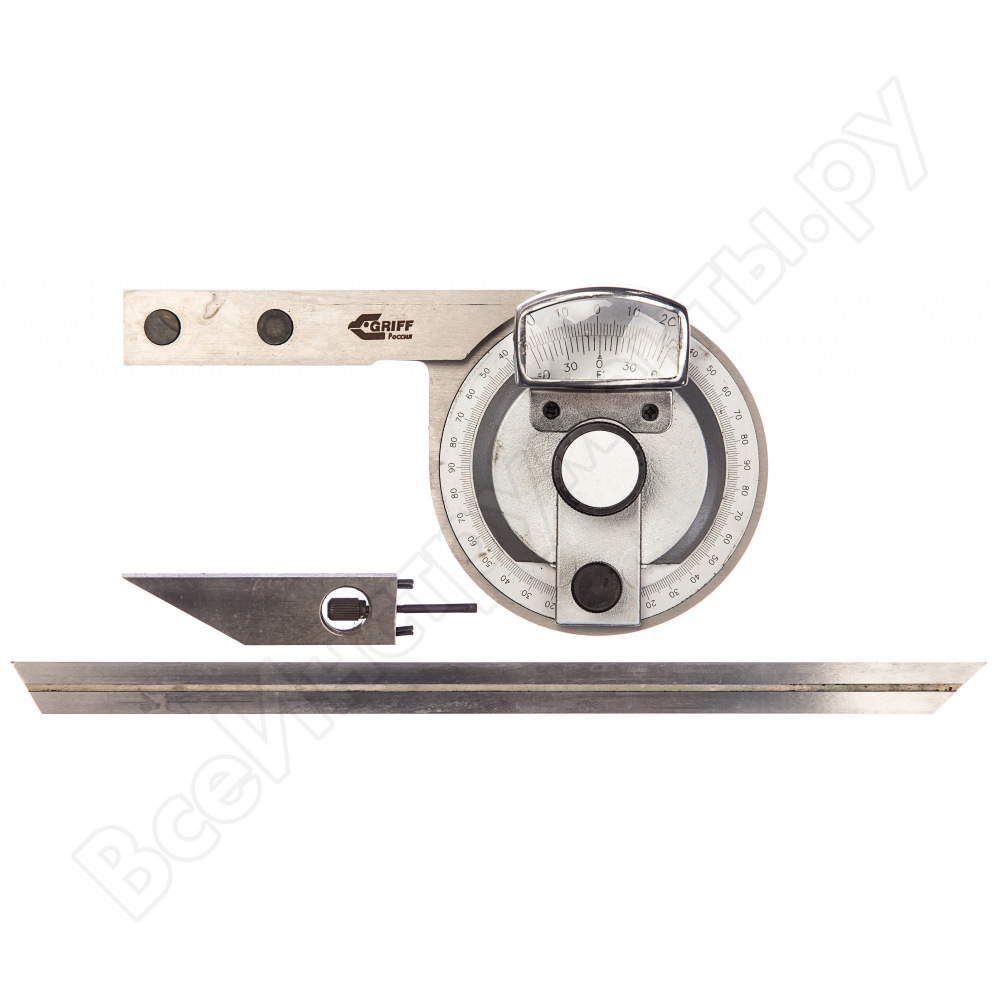 Последние можно совместить практически со всеми видами угломеров.
Последние можно совместить практически со всеми видами угломеров.
Универсальный угломер фото
Как пользоваться угломером: принцип проведения измерений
Измерение углов имеет бесхитростный принцип, особенно если речь идет о современных устройствах, напичканных электроникой. Если говорить о них, то все, что понадобится для измерения углов, это установить рейки инструмента в нужном положении или навести его лучи в необходимые точки. Дальше дело за электроникой – именно она выполняет все необходимые вычисления.
Другое дело механические, оптические и тому подобные угломеры – здесь придется учиться выполнять расчеты и пользоваться измерительной шкалой. Как правило, особую трудность вызывает угломер со шкалой нониуса. На самом деле, если разобраться, то сложного в таких измерениях нет ничего. Устанавливаем направляющие угломера в нужном положении и движемся взглядом по обычной шкале, пока не упремся в ноль на нониусе – так мы получим градусы угла. Чтобы вычислить угол до минут, движемся от нуля нониуса до тех пор, пока не найдем деление, четко совпадающее с делением основной шкалы – эта цифра и покажет искомое количество минут.
Как пользоваться угломером фото
Не намного сложнее производятся измерения и с помощью оптического угломера – две части инструмента устанавливаются в необходимое положение, после чего, глядя на шкалу в подвижную оптику, вычисляется измеряемый угол.
Как ни крути, а угломер в строительстве является отнюдь не бесполезным инструментом – если разбираться с областью его применения, то можно выяснить, что он станет незаменимым помощником и плиточникам, и гипсокартонщикам, и кровельщикам, и каменщикам, и многим другим мастерам, чья работа связана с построением плоскостей. Именно по этим причинам существует огромное количество угломеров разного назначения.
Автор статьи Александр Куликов
Морской угломер 8 букв сканворд
Добрый вечер! Здравствуйте, уважаемые дамы и господа! Пятница! В эфире капитал-шоу «Поле чудес»! И как обычно, под аплодисменты зрительного зала я приглашаю в студию тройку игроков. А вот и задание на этот тур:
А вот и задание на этот тур:
Вопрос: Угломерный инструмент. (Слово состоит из 8 букв)
Ответ: Теодолит (8 букв)
Если этот ответ не подходит, пожалуйста воспользуйтесь формой поиска.
Постараемся найти среди 1 126 642 формулировок по 141 989 словам.
Из истории мореплавания.
Чтобы оценить чрезвычайное мужество мореплавателей, которые осваивали ближнюю, а затем и дальнюю Атлантику, надо вспомнить, какими жалкими средствами они располагали для определения своего местонахождения в открытом море. Перечень будет краток: моряки XV века, в том числе и Христофор Колумб, не обладали практически ничем, что помогло бы им решить три главных задачи любого мореплавателя, отправляющегося в дальнее плавание:
держать курс,
измерять пройденный путь,
знать с точностью свое настоящее местоположение.
Для успешных плаваний в море были необходимы не только карты и лоции, но приборы, позволяющие вычислять время и координаты корабля, а для планирования путешествий – компас и измерители скорости.
У моряка XV века в распоряжении имелись всего лишь примитивная буссоль (в различных вариациях), грубые песочные часы, кишащие ошибками карты, приблизительные таблицы склонения светил и, в большинстве случаев, ошибочные представления о размерах и форме Земли! В те времена любая экспедиция по океанским просторам становилась опасной авантюрой, часто со смертельным исходом.
Морской хронометр. (или корабельное время)
Морской хронометр: 1 — хронометр; 2 — футляр; 3 — карданный подвес.
В 1530 году голландский астроном Гемма Фризий (1508-1555) в своем труде «Принципы астрономической космографии» предложил способ определения долготы с помощью хронометра, но отсутствие достаточно точных и компактных часов надолго оставили этот метод чисто теоретическим.
Этот способ был назван хронометрическим. Почему же способ оставался теоретическим, ведь часы появились много ранее?
Дело в том, что часы в те времена редко могли идти без остановки в течение суток, а их точность не превышала 12–15 минут в сутки. Да и механизмы часов того времени не были приспособлены для работы в условиях морской качки, высокой влажности и резких перепадов температуры. Конечно, кроме механических, в морской практике долгое время использовались песочные и солнечные часы, но точность солнечных часов, время «завода» песочных часов были совершенно недостаточными для реализации хронометрического метода определения долготы.
Да и механизмы часов того времени не были приспособлены для работы в условиях морской качки, высокой влажности и резких перепадов температуры. Конечно, кроме механических, в морской практике долгое время использовались песочные и солнечные часы, но точность солнечных часов, время «завода» песочных часов были совершенно недостаточными для реализации хронометрического метода определения долготы.
Сегодня считается, что первые точные часы были собраны в 1735 англичанином Джоном Гаррисоном (1693-1776). Их точность составляла 4–6 секунд в сутки! По тем временам это была просто фантастическая точность! И более того, часы были приспособлены для морских путешествий!
До изобретения механических часов проблема измерения времени была одной из наиболее сложных. Вплоть до 17 века песочные часы оставались единственным средством измерения времени в море. Песочные часы состояли из двух стеклянных сосудов, соединенных тонким отверстием. Сосуды заполнялись песком и запаивались, а количество песка было таким, чтобы за 1 час он полностью пересыпался из одного сосуда в другой, после чего часы переворачивали. Разумеется, что изменяя количество песка, можно было изменять промежуток времени, за которые песок пересыпался из одного сосуда в другой.
Обычно песочные часы были рассчитаны на 1 час, 30 минут и полминуты. На кораблях песочные часы на 1 час использовались для измерения времени суток. 30-минутные песочные часы использовались для замера промежутков записи информации в «лисицу» – прообраз бортового журнала. 30 секундные песочные часы были необходимы для измерения скорости лаглинем. Капитан Джон Смит на своем корабле ввел обычай звонить в судовой колокол, чтобы моряки знали, когда начинается или заканчивается их вахта.
Один удар колокола соответствовал 30 минутам, 2 удара – 1 часу и так далее вплоть до 8 ударов, означавших 4 часа. Вскоре этот способ оповещения стал общепринятым на всех кораблях в разных странах.
С появлением механических часов ими стали оснащать все морские суда, причем этот прибор считался настолько важным, что его запрещалось выносить с корабля для корректировки и навигатор брал на берег маленькие переносные часы, выставлял на них точное местное время и уже по их показаниям корректировались корабельные часы.
Первые часы, редко могли идти без остановки в течении суток, а точность их хода не превышала 12-15 минут в сутки. Лишь в 1735 году морские часы, изготовленные англичанином Джоном Гаррисоном, достигли точности 4-6 секунд в сутки.
Лаглинь.
Помимо необходимости измерения координат корабля морякам также было важно знать и третью координату – глубину под кораблем. Особенно важно было знать глубину в гаванях, устьях рек и других прибрежных водах, чтобы избежать повреждения судна о дно. Для этого использовался простой прибор, который представлял из себя свинцовый груз весом в несколько килограмм, подвешенный на легком лине, длина которого достигала десятков метров и на котором через определенное расстояние вешались метки или завязывались узлы. Такой измеритель глубины использовался со времен Древнего Египта до XX века. Лаглинь бросали за борт вперед по ходу судна и, когда он достигал дна, считывали маркировку на лине.
Лотлинь.
Если лаглинь использовался для измерения глубины, то для того, чтобы измерить скорость корабля использовался другой инструмент – лотлинь. Логлинь состоял из небольшой дощечки – лага, привязанной к длинному линю. На лине с интервалом в 14,46 м завязывались узлы, а сам линь иногда наматывался на специальную бобину. Дощечка была привязана таким образом, чтобы при попадании в воду линь максимально натягивался.
Дощечка бросалась в воду с кормы корабля и после ее падения в воду подсчитывалось число узелков, прошедших за 30 секунд. Дощечка удерживалась в воде, в то время как судно двигалось вперед и линь начинал разматываться с бобины. Число узелков и была скорость корабля, измеренная в узлах, то есть в морских милях в час. Этот метод измерения давал весьма грубый результат, но длительное время оставался единственным, который позволял измерять скорость судна.
Если рассчитать расстояние между узелками, то с первого взгляда оно должно составлять 15,43 м, ведь если период измерения это 1120 часа, то 1120 морской мили будет именно 15,43м ( 1852/120), тем не менее принято расстояние 14,46м, так как за счет этого компенсируется неточность измерения за счет проскальзывания дощечки по воде.
Астролябия.
Астролябия предназначалась для определения высота стояния небесных тел, так как, зная высоту и точное время, можно было определить широту, на которой находится судно. Плоско-сферическая астролябия была известна еще в Древней Греции приблизительно в 240 году до нашей эры, тогда же этот инструмент получил и свое название. На протяжении двух тысячелетий этот научный инструмент оставался практически неизменным.
Арабские ученые и математики разработали это простой, но точный механизм, способный определять время и находить небесные тела. Обычно морская астролябия состояла из сбалансированного металлического кольца с нанесенными на нем отметками, в центре которого находилась свободно вращающаяся планка с визиром (диоптр). Визир при повороте отсчитывал градусы, что позволяло измерять угол подъема солнца или звезд.
Мореплаватели, начиная с 1480 года, и вплоть до середины 18 века использовали астролябию и специальные таблицы, по которым определялась широта местоположения корабля. Для уменьшения погрешности измерения диаметр астролябии составлял 13-15 см, но многие английские мореплаватели использовали более точные астролябии диаметром до 20 см.
Для проведения измерений необходимо было навести астролябию на солнце или звезду. Зафиксировав разницу в показаниях между направлением на небесное тело и горизонт, а также зная местное время, можно было с помощью специальных таблиц определить широту места. Круг этот подвешивался на кольце в вертикальной плоскости, и посредством алидады, снабженной диоптрами, наблюдались звезды, высота которых отсчитывалась на лимбе, к которому впоследствии приделывался нониус. Если широта была известна, то по тем же таблицам можно было с высокой точность определить местное время.
Современным потомком астролябии является планисфера — подвижная карта звёздного неба, используемая в учебных целях.
Начиная со второй половины 19 века, на смену астролябии пришли квадранты, позволявшие проводить более точные измерения.
Квадрант.
Примитивный инструмент для измерения высоты звезд и определения широты
Как уже стало ясно, понятия географической широты и долготы для однозначного определения местоположения на поверхности Земли, впервые возникли в Древней Греции. Днем (в полдень) широту определяли по длине солнечной тени, ночью — по высоте определенных звезд над горизонтом. Сегодня пальма первенства в использовании широты и долготы присуждается Гиппарху из Никеи (ок. 190–125 гг. до н. э.), который предложил метод определения долготы разных точек по измерению местного времени при наблюдении лунного затмения. Кроме того, Гиппархом была изобретена астролябия (греч. astron — «звезда», и labe — «схватывание») — угломерный инструмент, служивший с древнейших времен до начала XVIII века для определения положения небесных светил. Раньше для тех же целей использовался квадрант.
Секстант.
Устройство прибора, основанного на принципе двойного отражения, впервые разработал Исаак Ньютон в 1699 году, но его открытие не было опубликовано и не нашло практического применения.
В 1731 году английский оптик Джон Хэдли усовершенствовал астролябию. Новый прибор, получивший название октант, позволял решить проблему измерения широты на движущемся судне, так как теперь два зеркала позволяли одновременно видеть и линию горизонта и солнце. Но октанту не досталась слава астролябии: за год до этого Хадли сконструировал секстант — прибор, позволявший с очень большой точностью измерять местоположение судна.
Секстант это наиболее современный и совершенный прибор для измерения угловых координат небесных тел. Секстант позволяет измерять как широту, так и долготу точки наблюдения, причем с довольно высокой точностью.
Секстант состоит из двух зеркал: указательного и неподвижного наполовину прозрачного зеркала горизонта, а также измерительной линейки и указательной трубы. Для измерений секстант настраивают таким образом, чтобы его зрительная труба была направлена на линию горизонта. Свет от небесного объекта (звезды или солнца) отражается от указательного зеркала и падает на неподвижное зеркало горизонта. Угол наклона указательного зеркала, отсчитываемый по указательной линейки и есть и есть высота стояния небесного тела.
Свет от небесного объекта (звезды или солнца) отражается от указательного зеркала и падает на неподвижное зеркало горизонта. Угол наклона указательного зеркала, отсчитываемый по указательной линейки и есть и есть высота стояния небесного тела.
Зная точное местное время по специальному астрономическому справочнику можно определить широту и долготу места нахождения наблюдателя. Секстант имел указательную линейку с сектором в 60 градусов, а более компактный октант – только 30 и у него отсутсвует зрительная труба, так как вместо нее применяется простой визир. Во всем остальном эти приборы совершенно одинаковы.
Компас.
Одним из первых навигационных «приборов» можно считать соларстейн (в переводе с древнескандинавского — «солнечный камень»). С его помощью можно было определить положение солнца в туманную погоду. Он несколько раз упоминается в текстах древних викингов.
Явление магнетизма было подмечено людьми еще в глубокой древности. История магнетизма богата наблюдениями и фактами, различными взглядами и представлениями.
Сегодня считается, что впервые свойства магнитного железняка описал Фалес Милетский в VI веке до н. э. Это были чисто теоретические выкладки, не подтвержденные опытами. Фалес дал маловразумительное объяснение свойствам магнита, приписывая ему «одушевленность». Через столетие после него Эмпедокл объяснял притяжение железа магнитом некими «истечениями» из него какой-то нематериальной субстанции.
В морской навигации магнитные явления использовались со времени раннего средневековья. В конце XII века в трудах англичанина Некаме и француза Гио де Провенс впервые описана простейшая буссоль (фр. boussole)- устройство, позволяющее определять магнитный азимут в море. Хотя в Китае буссоль применялась для навигации еще до нашей эры. В Европе же она приобрела распространение лишь в XIII веке.
Первым экспериментатором, занявшимся магнитами, был Петр Перегрин из Марикура (XIII век). Он опытным путем установил существование магнитных полюсов, притяжение разноименных полюсов и отталкивание одноименных.-320ddc.jpg) Разрезая магнит, он обнаружил невозможность изолировать один полюс от другого. Он выточил сфероид из магнитного железняка и пытался экспериментально показать аналогию в магнитном отношении между этим сфероидом и землей. Этот опыт впоследствии (в 1600 году) еще более наглядно воспроизвел Гильберт.
Разрезая магнит, он обнаружил невозможность изолировать один полюс от другого. Он выточил сфероид из магнитного железняка и пытался экспериментально показать аналогию в магнитном отношении между этим сфероидом и землей. Этот опыт впоследствии (в 1600 году) еще более наглядно воспроизвел Гильберт.
Первые компасы, изобретенные независимо друг от друга в Азии и в Скандинавии около XI века, пришли на Средиземноморское побережье Европы в XII веке и представляли собой плавающую в наполненной водой раковине дощечку. К одному из ее концов был прикреплен кусочек каламита — камня, обладающего природными магнитными свойствами, привозимого из Магнезии в Греции, где он очень распространен. Такой компас хорошо действовал лишь при незначительной качке на корабле.
Лисица (вахтенная доска, траверса)
Вахтенная доска использовалась навигаторами как своеобразная записная книжка. Наибольшее распространение этот инструмент получил в Англии и Дании. С помощью вахтенной доски можно было записывать важнейшие события, произошедшие на корабле – смена курса или заступление на вахту и затем производить различные путевые вычисления.
Вахтенная доска представляла собой простую деревянную доску, в которой просверливалось множество отверстий. На доске укреплялось несколько стержней, которые соответствовали различным событиям. Верхняя часть доски, выполненная в виде диска имела 32 сектора, аналогично секторам компаса. Каждый сектор имел по 8 отверстий, расположенных радиально. Набор из 8 стержней закреплялся в центре диска. Каждые 30 минут вахтенный офицер сверял курс по компасу и вставлял стержень в отверстие того сектора, который соответствовал направлению движения корабля. Через 4 часа происходила смена вахты и стержень, установленный 4 часа назад вставлялся в новое отверстие и так далее.
Для фиксации скорости в нижней части был аналогичный участок квадратной формы, каждая строка которого соответствовала 30-минутным интервалам, а столбцы – скорости. В конце каждого 4 часа вахтенный офицер подсчитывал количество стрежней и легко мог рассчитать расстояние, пройденное кораблем. Дополнительный участок доски позволял вести счет вахтам. Вахтенная доска была простым и надежным способом расчета движения корабля, который к тому же никак не зависел от погоды.
В конце каждого 4 часа вахтенный офицер подсчитывал количество стрежней и легко мог рассчитать расстояние, пройденное кораблем. Дополнительный участок доски позволял вести счет вахтам. Вахтенная доска была простым и надежным способом расчета движения корабля, который к тому же никак не зависел от погоды.
Скорее всего, подразумевается ОКТАНТ, который еще иногда называют размышляющим сектором. Это измерительный прибор, применяемый, прежде всего, в навигации (особенно морской).
Название «октант» получено от латинского octans, которым обозначают восьмую часть круга, потому как дуга вышеупомянутого инструмента – как раз одна восьмая круга.
Что касается открытия октанта, то его открыли сразу несколько человек не зависимо друг от друга.
Ориентировочно в 1730 году его изобрели английский математик Джон Хэдли и стекольщик в Филадельфии Томас Годфри. Затем в 1732 году октант создал во Франции Жан-Поль Фуши – астроном и преподаватель математики. А 1734 году его снова изобрел еще один человек – английский страховой маклер с большим интересом к астрономии Калеб Смит.
Увы, сейчас октантом уже не пользуются, потому как появились более удобные и простые в использовании устройства.
Угломерный инструмент: астрономический, геодезический, октанты, пр
При изготовлении деталей вручную или с применением различного оборудования всегда стоит вопрос о постоянном контроле за линейными, диаметральными и угловыми размерами. Если с измерением первых и вторых размеров особых вопросов не возникает, то с замерами углов несколько сложнее. Для их проведения применяют угломерный инструмент и для работы с ним необходим определенный навык.
Предназначен для измерения углов
Сведения о методах измерений
Для измерения углов применяют следующие методы:
- Путем сравнения с эталонными образцами.
- Гониометрическим способом, который основан на использовании измерительных устройств с угломерной шкалой.
- Тригонометрический способ, заключающийся в определении параметров, которые жестко связанных с углом посредством тригонометрическим путем.
Методы измерения угломерным инструментом
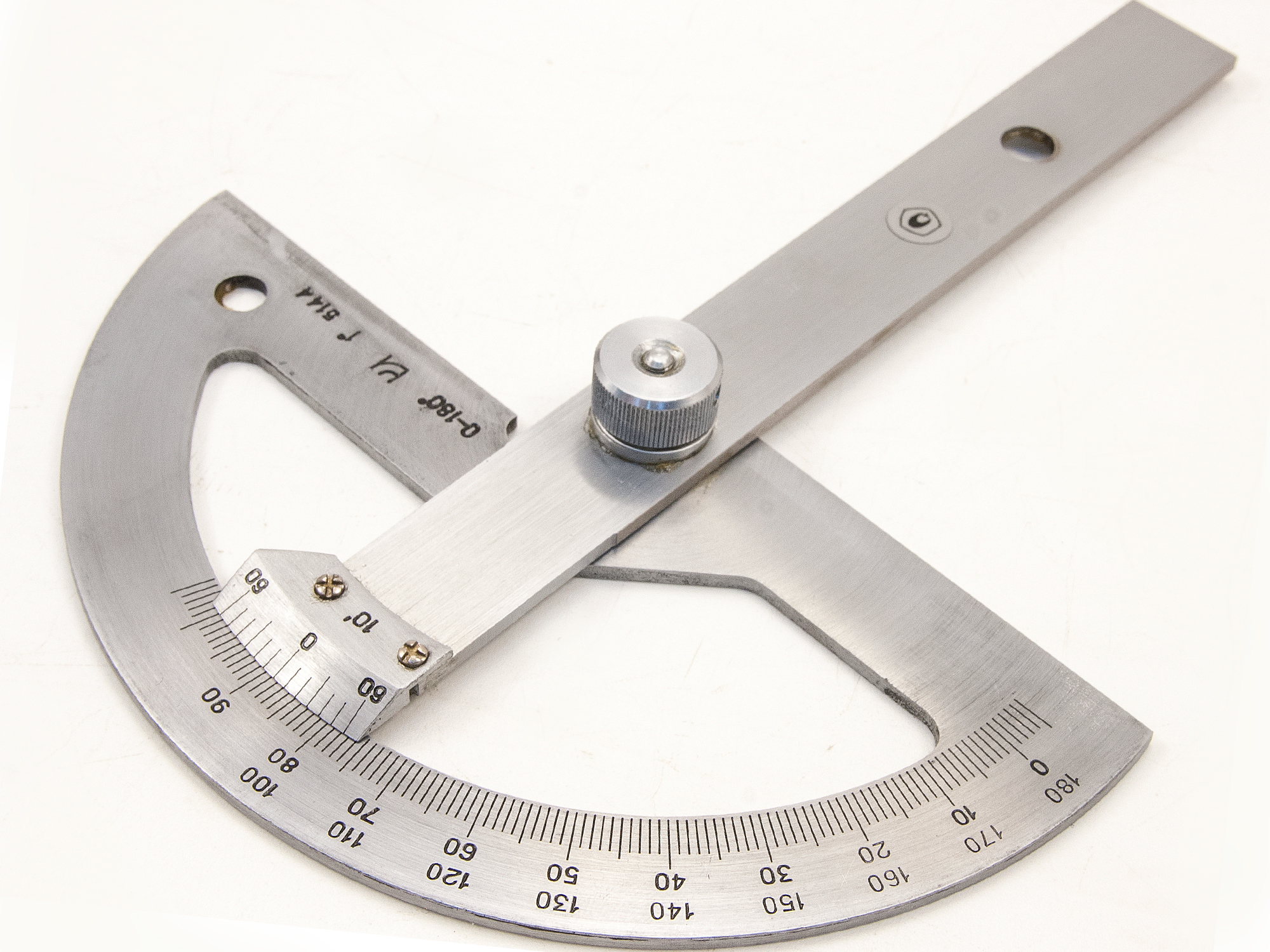
Размер угла, в абсолютных единицах измеряют с помощью мерительного инструмента под названием угломерный инструмент. У этого термина есть множество аналогов – транспортир, гониометр, секстант, астролябия и пр. Эти приборы отличают по точности выполняемых измерений, они могут иметь разное устройство, но принципы измерения одинаковы. Чаще всего на практике применяют нониусные угломеры.
Конструкция угломера
Это устройство относят к измерительным приборам механического типа. Их главная задача проведение измерения геометрических углов в деталях и конструкциях.
Конструкция угломера универсального
Угломерный инструмент с нониусом относится к механическому типу измерительных приборов, которые служат для измерения геометрических углов в различных деталях и конструкция. Результаты измерения представляются в градусах, наличие дополнительной шкалы, существует возможность получать более точные результаты. Эта дополнительная шкала и называется нониусом. Ее закрепляют на удлиненной линейке. Благодаря использованию этой шкалы точность измерений может быть получена в пределах десятых долей градуса.
Один из самых распространенных угломеров является модель 4УМ. С его помощью можно выполнять замеры в диапазоне от 0 до 180 градусов. Этот измерительный прибор отвечает требованиям ГОСТ 5378-88. Основная сфера его применения – это промышленность, связанная с производством деталей, металлоконструкций. Кроме этого ее применяют в ремонтном производстве.
К основным преимуществам этого прибора – его точность. Его применение позволяет оперировать довольно точными цифрами и именно это обеспечило его спрос среди специалистов в различных отраслях промышленности. Как и большинство механических приборов измерения, угломерный инструмент отличается длительностью эксплуатации, у него нет какого-то определенного срока годности, разумеется, при полном соблюдении правил эксплуатации и хранения.
Как и большинство механических приборов измерения, угломерный инструмент отличается длительностью эксплуатации, у него нет какого-то определенного срока годности, разумеется, при полном соблюдении правил эксплуатации и хранения.
К недостаткам этого класса приборов можно отнести сложность в ремонте. В этом изделии нет деталей, которые можно просто заменить, они сложны в изготовлении и чаще всего их приходится заказывать на заводе производителе.
Кстати, нередко приборы для проведения механических измерений часто сравнивают с электронными, и хотя они выглядят довольно устаревшими, они до сих пор находятся в строю.
Угломеры
Устройств для замера углов на самом деле множество, это и:
- угломерный инструмент с нониусом;
- угломерный астрономический инструмент и многие другие.
Их применяют везде, где необходимо выполнять соответствующие измерения, например, при изготовлении штамповой оснастки, или определении местоположения судна в пространстве.
Угломерный инструмент с нониусом
Как уже отмечалось, чаще всего применяют угломеры с нониусом. В нашей стране производят угломеры с нониусом разного типа. В частности, в номенклатуре инструментальной продукции, которую выпускает АО КЗ «КРИН» присутствуют следующие позиции:
- угломер с нониусом типа 2;
- угломер с нониусом типа 4;
- угломер с нониусом 5ум;
- угломер с нониусом 4ум.
По большей части они предназначены для выполнения измерения наружных углов с точностью 2 минуты. Модели типа 2 применяют для проведения замеров в пределах от 2 до 360 градусов.
Угломерный астрономический инструмент
Кроме того, их можно использовать при выполнении лекальных (разметочных) работ, например, при производстве сложного фасонного инструмента (штампы, пресс-формы и пр.). Надо отметить, что производство угломерного инструмента отличает высокая трудоемкость, а материал для его производства обладает высокой стоимостью.![]() Для его производства применяют инструментальные стали, цена которых в нескольких раз превышает стоимость конструкционных.
Для его производства применяют инструментальные стали, цена которых в нескольких раз превышает стоимость конструкционных.
Конечно, существует угломерный инструмент, который обладает более низкой стоимостью. Для его изготовления применяют более простые материалы. Такую продукцию выпускают множество предприятий, расположенных в нашей стране и за ее пределами. Как пример можно привести
Угломеры с нониусом SKRAB
Один из ярких представителей этой продукции угломерный инструмент с нониусом SKRAB модели 40320. Его применяют для проведения замеров внутренних углов в диапазоне от 0 до 220 градусов. Точность такого прибора составляет 1 градус. В принципе такой точности хватает для проведения большинства работ, например, при разделке пластикового профиля при создании светопрозрачных конструкций (окон, дверей и пр.).
В последние годы производители выпустили на рынок электронные угломерные инструменты. Их точно так же применяют в промышленности, строительстве и пр. Их использование значительно проще, чем угломерных устройств механического типа. По большей части, этот инструмент производят из пластика или алюминиевых сплавов. На раме установлен измерительный блок. Точность электронных угломеров может колебаться в зависимости от качества производства и типа электронного устройства. Но в среднем она может лежать в диапазоне от 0,3 до 1 градуса. Эти угломерные приборы по большей части применяют в строительстве.
Технические характеристики
ГОСТ 5378-88 – это документ, определяющий технические требования к угломерам с нониусом. В нем определены типы угломерного инструмента с нониусом. Указаны предельные отклонения в проводимых измерениях и пр.
Технические характеристики угломера универсального
Технические характеристики включают в свой состав такие параметры, как твердость, которая должна составляя 57 по HRC на измерительных поверхностях.
Измерительный инструмент угломерного типа в соответствии с требованиями ГОСТ 5378-88 должен выполнить 18000 измерений. После этого можно говорить о его замене.
Применение
Как уже отмечалось, угломерные устройства нашли свое применение практически во всех отраслях, промышленности, транспорта.
В строительном деле угломеры применяют при выполнении работ по монтажу, разметке и выполнении проектных работ. С его помощью осуществляют контроль над монтажом строительных конструкций, которые расположены под определенным углом по отношению друг к другу. Причем измерения могут проводиться в трех плоскостях. Кроме, угломера в строительстве применяют отвесы и уровни.
Кроме этого, угломерный инструмент применяют в столярном и плотницком деле, в геодезии. Даже в медицине так инструмент применяют для контроля над суставами, позвоночником и пр.
Как пользоваться угломером с нониусом
Как пользоваться угломером с нониусом? Угломерным оборудованием механического типа довольно просто. Его можно использовать на любой поверхности и проводить измерения и внешних, и внутренних углов. При установке прибора нельзя допускать перекосов, это может привести к появлению значительной погрешности.
На приборе установлена специальная шкала, которая позволяет повысить точность измерений на порядок. В чем-то они похожи на традиционный штангенциркуль. Например, для замера внешнего угла, достаточно приложить к одной из плоскостей линейку, находящуюся в основании прибора, а к другой подвести подвижную часть, связанную со шкалой. В результате можно будет узнать искомый угол. Более подробная информация приведена в инструкции по эксплуатации угломерного прибора. Она, как и паспорт входит в комплект поставки.
На базовой шкале показаны градусы, по внешнему виду она похожа на школьный транспортир и измерение углов угломером с нониусом не составит труда даже для новичка.
Другие угломеры
Разумеется, угломерная техника не ограничивается той, которая перечислена выше. На самом деле измерительный инструмент этого класса имеет древнюю историю. Еще финикийские моряки применяли секстанты, древнейшие угломерные инструменты. Кроме, секстантов у мореплавателей в ходу и такой прибор, как морской мореходной октант, в качестве измерительной шкалы в нем установлена шкала, которая охватывает всего 45 градусов. Но этого достаточно, чтобы вести наблюдение за звездами и тем самым определить свое местоположение в пространстве. Использование шкалы нониуса позволяет выполнять более точные расчеты.
- Угломерный инструмент секстант
- Угломерный инструмент октант
При проведении строительных работ широко применяют уклономер транспортир. С его помощью измеряют расположение строительных конструкций в пространстве и относительно друг друга. При производстве мебельных работ также важно соблюдать определенные углы, например, между стенками шкафа или тумбочки.
Недостатки угломеров
Угломерная техника требует к себе особо бережного отношения. И в отличие от другого инструмента ее необходимо хранить в отведенном месте. Несмотря на заявленные производителей сроки его эксплуатации, угломер может выйти из строя даже не от очень сильного удара или падения.
Еще одно неудобство в эксплуатации заключается в относительно мелкой разметке, но эта проблема решается установкой на прибор увеличительного стекла.
Поверка
Весь мерительный инструмент, применяемый на производстве должен пройти обязательную процедуру поверки. По крайне мере на тех предприятиях, где внедрена система управления менеджментом.
Поверка мерительного инструмента – это набор определенных операций, результатом которых становится заключение уполномоченного органа о соответствии предъявляемого инструмента завяленным требованиям.
Поверка угломером с нониусом должны выполнять только в лабораториях прошедших аттестацию в Росстандарте РФ.
Срок поверки устанавливает метрологический отдел предприятия.
Угломер — это… Что такое Угломер?
Угломер (синонимы — уклономер, угломерка, угломера, угло́метр) — угломерный прибор (инструмент, снаряд), предназначенный для измерения геометрических углов в различных конструкциях, в деталях и между поверхностями (в основном контактным методом) и между удалёнными объектами (оптическим методом). Измерение производится в градусах, на основе линейчатой шкалы, линейчато-круговой шкалы (с механическим указателем или стрелкой), нониуса или в электронном виде, в зависимости от типа прибора.
Угломер в самом простом виде состоит из двух пластин (линеек), закреплённых вместе на одной оси, остающихся подвижными на этой оси (образуют подвижный наугольник), с нанесенной шкалой, выраженной в градусах. Шкала может быть линейчатой или линейчато-круговой (нанесённой по окружности вокруг оси, на одной из линеек). В некоторых практических приложениях, например столярных, не требуется регулировка всех углов наугольника и обычно работают с несколькими фиксированными углами, один из таких столярных наугольников носит специальное название — ерунок (столярный наугольник, у которого линейки закреплены под углом 45° или в треугольном виде 45°/45°). Впервые угломеры появились в древности (в Древнем Египте и Древнем Риме), когда возникла необходимость при проведении строительных работ устанавливать определённые углы в различных постройках и между поверхностями.
Угломер
Виды угломеров
- угломеры строительные — предназначены для выполнения строительных, монтажных, разметочных и проектных работ. Позволяет контролировать монтаж строительных элементов и установку строительного оборудования, проводить монтаж различных конструкций, которые состоят из наклонных элементов, располагающихся друг относительно друга под определённым углом. В строительстве для разметочных и строительных работ, наряду с угломером, используют отвес и уровень (ровень, юстимер).
 В строительстве для разметочных и строительных работ, наряду с угломером, используют отвес и уровень (ровень, юстимер).
В строительстве для разметочных и строительных работ, наряду с угломером, используют отвес и уровень (ровень, юстимер).- угломеры плотника, столяра — предназначены для выполнения плотницких и столярных работ (могут быть с регулируемыми или фиксированными углами — угольник, треугольник, наугольник, ерунок).
- угломеры слесарные — предназначены для выполнения слесарных работ.
- угломеры топографа — предназначены для выполнения топографических работ.
- угломеры горные — приборы для измерения горизонтальных и вертикальных углов и расстояний в маркшейдерских съёмках, не требующих высокой точности.
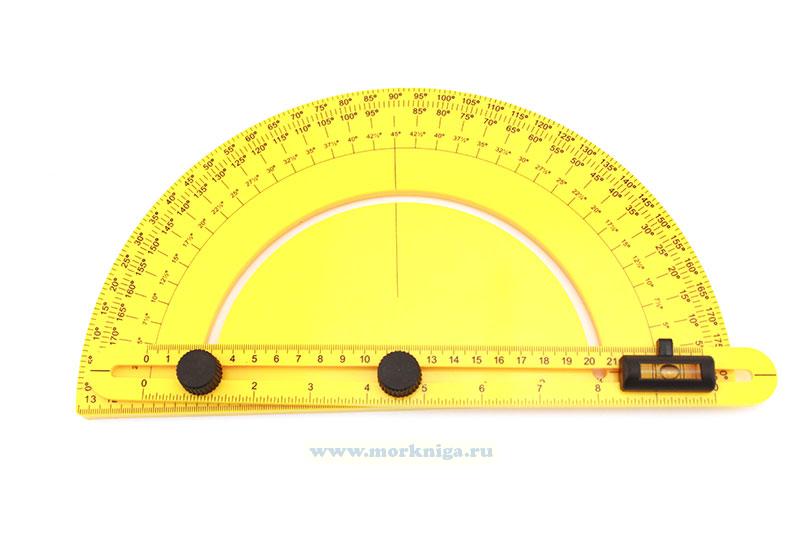
- угломеры учебные — угломеры с фиксированными углами (треугольники, угольники, с углами 45°/45°/90° и 30°/60°/90°) и угломерные инструменты (транспортиры, для измерения углов от 0° до 180°, с точностью 1°), бывают совмещены с линейкой, используются для измерения углов, для рисования многоугольников и для различных расчётов. Угломеры учебные бывают двух типов, большие — для классной доски и небольшие — для расчётов и рисования учащимися в тетрадях и альбомах.
- угломеры инженерные (конструкторские) — высокоточные измерительные инструменты, которые используется для измерения углов (наружных и внутренних) конструкций, деталей и поверхностей, методом непосредственного контакта или удалённых объектов, оптическим (лазерным) методом.
- угломеры астрономические — высокоточные измерительные инструменты, которые используется для измерения углов между поверхностью (горизонтом) Земли и удалённым объектом (например, солнцем) или между удалёнными объектами (например, звёздами), методом оптического измерения. Для этого могут использоваться телескопы, оснащённые угломерами.
- угломеры мореходные (навигационные) — предназначены для определения географической широты (по таблицам, по измеренному углу светила) при дальних морских путешествиях. Для этого используются угломерные приборы, с использованием оптического метода измерения угла — секстанты, принцип работы этого прибора основан на том, что угол светила (солнца, луны, звёзд) над горизонтом в определённый день и время зависит ещё и от географической широты, на которой находится наблюдатель. Аналогичным угломером можно пользоваться даже на самолётах, для определения географической широты местонахождения самолёта.
- угломеры артиллерийские — предназначены для установки артиллерийского орудия под необходимым углом.
По типу устройства угломеры бывают механические (простые и нониусные), фиксированных углов, оптические, маятниковые, электронные (цифровые) и лазерные. Существуют также комбинированные электронные угломеры, с электронным уровнем и угломеры электронные с лазерным уровнем.
Угломеры
Угломеры отличаются по типу устройства, по размерам и погрешностям. Важным параметром угломера являются пределы допускаемой погрешности при проведении измерений. Погрешность прибора зависит от назначения угломерного прибора и является специфицированным параметром.
Угломеры учебные
См. также
Литература
- Д. Н. Ушаков Толковый словарь русского языка.
- Большая советская энциклопедия. Угломерные приборы. Угломер горный.
- В. Даль. Толковый словарь живого великорусского языка.
- Словарь по естественным наукам. Глоссарий.
72143-18: ЭУ-1 Приборы электронные угломерные
Назначение
Приборы электронные угломерные «ЭУ-1» (далее по тексту- ЭУ-1) предназначены для измерений углов.
Описание
Принцип действия ЭУ-1 основан на преобразовании изменения проекции силы тяжести на чувствительные оси датчика измерения угла в электрический сигнал постоянного тока.
ЭУ-1 имеет моноблочное исполнение и состоит из датчика измерения угла наклона с аналоговым выходом, аналого-цифрового преобразователя, вычислительного блока, устройства хранения данных, жидкокристаллического дисплея и блока электропитания.
В качестве чувствительного элемента датчика измерения угла используется микромеханический двухосевой акселерометр. Аналоговый выходной сигнал акселерометра, пропорциональный проекции ускорения свободного падения на чувствительную ось датчика, преобразуется 24-битным аналого-цифровым преобразователем в цифровую форму и передаётся в вычислительный блок. Вычислительный блок содержит модуль математической обработки регистрируемых данных и служит для обработки результатов измерений. Электропитание ЭУ-1 может осуществляться как от сети переменного тока 220 В, так и от встроенной аккумуляторной батареи, которая обеспечивает автономное питание ЭУ-1 не менее 6 часов.
Вычислительный блок содержит модуль математической обработки регистрируемых данных и служит для обработки результатов измерений. Электропитание ЭУ-1 может осуществляться как от сети переменного тока 220 В, так и от встроенной аккумуляторной батареи, которая обеспечивает автономное питание ЭУ-1 не менее 6 часов.
На лицевой панели ЭУ -1 расположены жидкокристаллический дисплей, тумблер включения и навигационные кнопки. На корпусе ЭУ-1 установлены разъём для подключения кабеля питания и слот для устройства хранения данных.
Общий вид ЭУ-1 представлен на рисунке 1.
Для защиты от несанкционированного доступа выполнено опломбирование корпуса ЭУ-1.
Схема пломбировки от несанкционированного доступа и обозначение места нанесения знака поверки представлены на рисунке 2.
Программное обеспечение
При работе с ЭУ-1 используется встроенное программное обеспечение (далее — ПО). Встроенное ПО выполняет следующие функции:
— измерение углов;
— отображение и хранение результатов измерений;
— передачу результатов измерений на внешний носитель информации;
— формирование электронного архива в текстовом формате с привязкой ко времени. Уровень защиты ПО «Средний» в соответствии с Р 50.2.077- 2014.
Влияние ПО на метрологические характеристики учтено при нормировании метрологических характеристик.
Таблица 1 — Идентификационные данные программного обеспечения
|
Идентификационные признаки |
Значение |
|
Идентификационное наименование ПО |
MDR32F92QI |
|
Номер версии (идентификационный номер) ПО |
1.0 и выше |
|
Цифровой идентификатор ПО |
998EFF1335A09BFC09BBF125787406F262BBDBC21) |
|
Алгоритм вычисления идентификатора ПО |
SHA1 |
|
Примечание: 1) — значение контрольной суммы приведено для версии ПО 1.0 | |
Таблица 2 — Метрологические характеристики
|
Наименование характеристики |
Значение |
|
Диапазон измерений угла, градус |
±3 |
|
Диапазон показаний, градус |
±4 |
|
Пределы допускаемой абсолютной погрешности измерений угла, градус
— для измерений угла в диапазоне от -2° включ. до +2° включ.
— для измерений угла в диапазоне от -3°до -2° и от +2° до +3° |
±0,015
±0,02 |
|
Таблица 3 — Основные технические характеристики | |
|
Наименование характеристики |
Значение |
|
Параметры электрического питания
— напряжение переменного тока, В
— частота переменного тока, Гц |
220±22
50±5 |
|
Потребляемая мощность, В • А, не более |
30 |
|
Время автономной работы, часов, не менее |
6 |
|
Частота регистрации данных, Гц |
1 |
|
Степень защиты корпуса ЭУ |
IP20 |
|
Габаритные размеры, мм, не более
— длина
— высота
— ширина |
190
195
155 |
|
Масса, кг, не более |
5 |
|
Условия эксплуатации:
— температура окружающей среды, °С
— изменение температуры окружающего воздуха в течение одного часа, °С, не более
— относительная влажность, %
— атмосферное давление, кПа |
от +5 до +35 5
от 45 до 80 от 84 до 107 |
|
Средний срок службы, лет Средняя наработка на отказ, ч |
10
3000 |
Знак утверждения типа
наносится на информационную табличку ЭУ-1 металлографическим способом и на титульные листы руководства по эксплуатации и паспорта типографским способом.
Таблица 4 — Комплектность средства измерений
|
Наименование |
Обозначение |
Количество |
|
Прибор электронный угломерный «ЭУ-1» |
БЛИЦ. 401211.003 |
1 шт. |
|
Кабель питания |
1 шт. | |
|
Носитель информации микро SD карта с адаптером |
1 шт. | |
|
Контейнер для транспортировки |
1 шт. | |
|
Картридер для ПК микро SD и SD |
1 шт. | |
|
Паспорт |
БЛИЦ.632753.007ПС |
1 экз. |
|
Руководство по эксплуатации |
БЛИЦ.632753.007РЭ |
1 экз. на партию |
|
Методика поверки |
МП 253-008-2018 |
1 экз. на партию |
Поверка
осуществляется по документу МП 253-008-2018 «ГСИ. Приборы электронные угломерные «ЭУ-1». Методика поверки», утверждённому ФГУП «ВНИИМ им. Д. И. Менделеева»
25.04.2018 г.
Основное средство поверки:
Головка делительная оптическая ОДГЭ, рег. № 26906-04.
Допускается применение аналогичных средств поверки, обеспечивающих определение метрологических характеристик поверяемых СИ с требуемой точностью.
Знак поверки наносится на лицевую панель прибора.
Сведения о методах измерений
приведены в эксплуатационном документе.
Нормативные документы
БЛИЦ.401211.003 ТУ Прибор электронный угломерный «ЭУ-1». Технические условия
Полученные навигационные данные, привязанные ко времени выдаются потребителю по последовательному интерфейсу RS-232 в виде предложений в стандарте NMEA-0183.
Кроме того, аппаратура формирует шкалу времени UTC в виде импульсов 1 pps длительностью 1 мс и оцифровки этих импульсов. Передний фронт импульсов 1 pps привязан к началу секунды UTC. Импульсы 1 pps выдаются потребителю по интерфейсу RS-422, оцифровка импульсов с помощью предложения PORZV по интерфейсу RS-232.
Изделие представляет собой навигационную аппаратуру, состоящую из трех антенн, блока угломерного и блока инерциальных датчиков. В состав блока угломерного входят три ГЛОНАСС/GPS приемника и вычислительное устройство.
Наличие блока инерциальных датчиков дает возможность получать дополнительную информацию о линейных ускорениях и об угловых скоростях объекта и использовать ее при определении навигационных параметров совместно с информацией от НКА. Такой интегрированный режим работы позволяет повысить надежность определений, а также поддерживать угломерное решение при невозможности получения спутникового решения (под накрытиями или при сильных затенениях).
Угломер спутниковый трехосевой с инерциальным датчиком СН-5712 выпускается в двух исполнениях – корпусном (защищенном) и бескорпусном (незащищенном).
Возможные сферы применения
Технические характеристики и рабочие условия
| |
Измерения вертикальной скорости: новая инновационная система наблюдений использует гониометр Argos
Авторское право на фото Hubert Bataille / IRD
Измерение вертикальной скорости в верхних слоях океана имеет решающее значение для понимания динамики океана в мелком масштабе. Вот почему Средиземноморский институт океанографии (MIO) разработал новую систему профилирования вертикальной скорости — в дополнение к измерениям, полученным ADCP и океанскими планерами. Прототип профилографа был развернут в море во время круиза FUMSECK, и предварительные результаты очень положительные.
Кампания FUMSECK — это недельная кампания в Генуэзском заливе на борту НИС «Тетис II». Он является частью проекта BIOSWOT, возглавляемого Французским космическим агентством, CNES, Французским университетом LOCEAN-IPSL и MIO для подготовки к миссии спутника SWOT (запуск в 2021 году). Цель состоит в том, чтобы протестировать различные инструменты, которые можно было бы использовать для наблюдения за трехмерной мелкомасштабной динамикой океана в течение нескольких недель.
Новый инновационный профилограф вертикальной скорости
Одним из инструментов, испытанных во время этой миссии, был профиломер вертикальной скорости , разработанный Жан-Люком ФУДА из MIO и его командой .Этот инструмент оснащен спусковым механизмом, датчиком давления и прикреплен к очень маленькому дрейфующему бую Argos. Как только он достигает глубины 200 м, он отделяется от своего балласта с помощью активации сброса и очень медленно всплывает на поверхность.
Для отслеживания прибора и его ценных данных команда использовала гониометр Argos, предоставленный национальным морским приборным комплексом (CNRS-DT INSU) в Бресте. Гониометр разработан специально, чтобы позволить пользователям находить активные PTT Argos в полевых условиях в радиусе 100 км.Этот высокочувствительный пеленгатор — отличный инструмент для быстрого восстановления дорогостоящего океанского оборудования и всех ценных данных, записанных на борту, с помощью спутниковой телеметрической системы Argos.
Преимущества гониометра Argos
«Мы очень боялись потерять оборудование. Но программное обеспечение для громкой связи было простым в использовании и позволяло очень легко находить небольшой дрейфующий буй Argos, прикрепленный к профилировщику, после каждого развертывания », — объясняет Жан-Люк Фуда.
Программное обеспечение гониометра Argos отображает:
- Направление на платформу Аргос
- Мощность сигнала передатчика Argos
- GPS-координаты, передаваемые платформой (если есть)
- Все полученные данные сохраняются и могут быть загружены через USB
Во время крейсерского полета FUMSECK профиломер вертикальной скорости был развернут 6 раз , и каждый раз успешно восстановился очень быстро благодаря гониометру, даже в бурном море .
Этот гониометр полностью водонепроницаем и полезен для обнаружения любых передатчиков Argos в полевых условиях, включая метки для слежения за животными, такие как метки птиц и всплывающие окна, или любые океанские платформы, оборудованные Argos.
Как пользоваться гониометром Argos:
О MIO
Исследовательская лаборатория MIO является составной частью Института OSU-Pytheas и находится под совместным руководством Университета Экс-Марсель, Университета Тулона, CNRS и IRD.Цель MIO — лучше понять океаническую систему и ее эволюцию в ответ на глобальные изменения. Поэтому он имеет центр экспертизы в области морской биологии, экологии, биоразнообразия, микробиологии, галевтики, физики, химии, биогеохимии и седиментологии.
Дополнительная информация о круизе FUMSECK: , статья на французском языке
Гониометр Argos
ГОНИОМЕТР ARGOS
Пеленгатор Argos для восстановления передатчика и активного слежения
Гониометр Argos помогает пользователям находить активно передающие сигналы
платформ ARGOS в полевых условиях.В зависимости от высоты и
условия приема, гониометр может обнаружить все
передающих платформ в радиусе 100 км и более.
Этот высокочувствительный радиопеленгатор позволяет использовать поле
Восстановление платформ Argos путем определения силы передачи и направления к платформе по
с любыми позициями GPS, передаваемыми устройством. Кроме того,
гониометр будет загружать и декодировать сообщения (с
платформ, схема декодирования которых у нас есть).
Гониометр Argos готов к работе прямо из коробки!
Гониометр — единственный специальный инструмент Argos для восстановления всплывающих спутниковых меток, активного отслеживания животных и восстановления океанских планеров в случае отказа основной системы связи.
Аренда в собственность: Наша программа аренды в собственность позволяет вам сдавать в аренду перед покупкой. За 1200 долларов в месяц вы можете сдать квартиру в аренду, и если вы решите приобрести ее в дальнейшем, мы применим арендованную сумму к покупке новой квартиры.
Покупка: Вы также можете приобрести единицу напрямую. Гарантия на оборудование составляет 2 года.
ДЛЯ ЗАГРУЗКИ БРОШЮРЫ ГОНИОМЕТРА ARGOS НАЖМИТЕ ЗДЕСЬ!
Комплект гониометров, включает:
Жесткий футляр со степенью защиты IP66
Гониометр (RXG-134)
Приемная антенна гониометра (AXG-134)
Универсальный силовой преобразователь
Кабель USB
Крепление антенны
Антенна BNC (см. Руководство по эксплуатации)
ОТЗЫВЫ ПОЛЬЗОВАТЕЛЕЙ…
«… гониометр отлично работал для отслеживания PSAT в момент их появления в Glacier Bay! Мы смогли восстановить 4/5 всплывающих тегов, включая 1 тег Desert Star, у которого отсутствовала антенна! Оставшийся тег — еще один тег Desert Star, который не передает достаточно часто, чтобы определить местоположение Аргоса, возможно, у этого тега также отсутствует его антенна …. Это оборудование — очень хорошая новость для исследователей — теперь можно ожидать, что если PSAT всплывают в зоне, до которой можно добраться на лодке, метки можно восстановить физически.Для моего исследования это означает, что я могу разбираться в геомагнитных данных и данных акселерометра из тегов Desert Star и искать доказательства нереста палтуса в тегах компьютера дикой природы, которые предоставляют записи глубины с 10-секундными интервалами … Так что я очень рад и благодарен за то, что вы разработали этот инструмент и что он доступен в краткосрочную аренду ».
-Доктор. Джули Нильсен (Университет Аляски)
«Миссия прошла успешно, все оборудование было восстановлено.Эта история свидетельствует о надежности маяков Argos (и системы), которые все еще функционируют после 13 лет погружения в южную часть Индийского океана, и о решающей роли гониометра в извлечении материала ».
— Морской консультант LAMY
«Поисковик гонио был весьма полезен и использовался для окончательной локализации планера. У нашего точечного тега были проблемы, которые сильно усложняли ситуацию. Однако в день успешного восстановления тег работал.Мы получили первые сигналы от метки на расстоянии около 10 морских миль и начали получать прерывистую радиопеленгаторную информацию на расстоянии около 6-7 миль. Примерно на 3 мили мы получали каждый пинг (90 секунд). «
— Деннис Стэнли (Университет Западной Австралии)
Датчики | Бесплатный полнотекстовый | Носимый гониометр и акселерометр для измерения угла коленного сустава в повседневной жизни
1. Введение
Анализ осанки и движений человека имеет фундаментальное значение для широкого спектра приложений и дисциплин, таких как физическая и нейрореабилитация, спортивная медицина, работоспособность человека. оценка и виртуальное обучение.Хотя стандартные инструменты анализа движения широко используются в этих областях, разработка и проверка амбулаторных и незаметных сенсорных систем, которые обеспечивают надежное измерение движений и активности человека вне лаборатории в повседневной жизни, все еще остаются открытыми проблемами в текущей литературе. . Разработка и проверка носимых технологий, нацеленных на то, чтобы позволить врачам и терапевтам удаленно контролировать и обучать пациентов во время их реабилитационных упражнений на этапе восстановления, являются одними из текущих проблем.
Недавно, как и предполагали Де Росси и Велтинк в [1], были разработаны носимые текстильные устройства для измерения движений человека и электрофизиологические устройства для сбора данных. Авторы данной статьи сотрудничали в рамках проекта ЕС INTERACTION [2] в разработке электронной текстильной платформы, оснащенной беспроводным трехмерным инерционным движением, а также растяжением и гониометрическим зондированием на основе текстиля [3]. Система ВЗАИМОДЕЙСТВИЕ была протестирована на пациентах, перенесших инсульт, чтобы оценить качество их подвижности, а также их способность дотягиваться и хватать.За последнее десятилетие инерциальные измерительные блоки (IMU), основанные на интеграции акселерометров, гироскопов и магнитометров, приобрели репутацию передовых технологий слежения за движением с помощью носимых устройств [4,5,6,7,8]. IMU оценивают ориентацию сегментов тела, к которым они прикреплены, комбинируя информацию с нескольких датчиков с помощью специальных алгоритмов оптимального слияния датчиков, в основном на основе фильтрации Калмана [4,5,7]. Общий подход заключается в применении несвязанного интегрирования сигнала гироскопа [9] и корректировке отклонений наклона и курса с помощью измерений акселерометра и магнитометра.Комбинация различных IMU, размещенных на связанных сегментах тела, и дополнительная информация о кинематических ограничениях позволяют измерять углы суставов [10,11]. Системы на основе IMU также могут использоваться для отслеживания скорости человеческого тела, как показано в исследовании, проведенном Юанем [12]. В настоящее время на рынке появилось несколько носимых систем анализа движения, основанных на технологии IMU. В хорошо известной системе XSens MVN [13,14] используются запатентованные беспроводные трекеры движения (MTw), прикрепленные к прикрепленному костюму для отслеживания движений всего тела (верхние / нижние конечности, туловище и шея).Каждый MTw включает в себя трехосный акселерометр, трехосный гироскоп и трехосный магнитометр и вычисляет алгоритмы слияния для расчета глобальной ориентации сегмента тела, к которому он прикреплен. Ориентации отдельных сегментов тела дополнительно объединяются с помощью запатентованных биомеханических моделей для оценки полной кинематики человеческого тела. Системы XSens, которые использовались в текущем исследовании для тестирования предлагаемой техники, были приняты и протестированы во многих исследованиях.Например, Zhang [15] показал среднюю ошибку ниже двух градусов, сравнивая сгибание-разгибание колена, обнаруженное двумя MTw, с тем же углом, полученным стереофотограмметрической системой. Аналогичные системы на основе IMU, ориентированные на анализ походки [16,17], были проданы компанией INSENCO Co. (состоящей из девяти инерционных датчиков, размещенных на нижних конечностях в сочетании с беспроводными шестиосевыми датчиками силы [18]) и Tec Gihan ( Система M3D, сочетающая в себе инерционные единицы измерения и носимые силовые пластины [19]).Помимо широкого распространения в этой области, системы на основе IMU страдают от потери точности из-за магнитных помех; они могут быть громоздкими, а их стоимость может быть значительной. Вклад инерционного и поступательного ускорений может ограничить точность обновления акселерометра [20]. Наиболее важно то, что присутствие ферромагнитных материалов или других магнитных помех из-за шума окружающей среды, что неизбежно в повседневной жизни, ограничивает точность компенсации курса [21,22] и может поставить под угрозу полную оценку ориентации.Принимая во внимание наш контекст, в котором носимые ненавязчивые сенсорные устройства в повседневной жизни, амбулаторная, но надежная система мониторинга, которая избегает использования магнитометров, была бы полезной, как уже указывал Силь в [23].
Таким образом, новый подход, описанный в этой работе, использует только компоненты ускорения IMU в сочетании с другими источниками измерений, взятыми из определенного класса датчиков электронного текстиля.
Были разработаны решения на основе текстиля или электронного текстиля, и их возможное применение для амбулаторного и незаметного обнаружения движения описано в нескольких исследовательских работах, в том числе [24,25,26,27,28].Решения на основе текстиля имеют ряд преимуществ по сравнению с твердотельными датчиками: низкая стоимость, легкий вес, небольшая толщина, гибкость и возможность адаптации к различным структурам тела. Используя эти типы датчиков, можно создавать чувствительные предметы одежды с сенсорными полосками, прикрепленными к определенным точкам на обычной ткани. Несмотря на эти привлекательные характеристики, применение текстильных датчиков по-прежнему ограничено, в основном из-за низкой надежности, что ограничивает их использование для восстановления больших и медленных движений.Недавно мы разработали новое поколение гониометров на текстильной основе, полученных путем соединения двух слоев трикотажных пьезорезистивных тканей (KPF) через электрически изолированный слой, как описано в [29]. По сравнению с ранее разработанными электронными текстильными датчиками, текстильные гониометры могут обеспечивать точное и надежное измерение углов между соединенными сегментами тела [29,30,31]. Хотя текстильные гониометры представляют собой важный шаг вперед в области обнаружения движений человека с помощью носимых устройств, они все же имеют свои ограничения.В частности, калибровка датчика, которая должна выполняться в двух известных угловых положениях, как описано в разделе 2.1, должна быть рассчитана после того, как датчик будет интегрирован в ткань и надет пользователем. Из-за внутренней природы текстильных материалов, которые имеют тенденцию изменять свои механические свойства с течением времени, калибровочные коэффициенты могут медленно дрейфовать, и процедуру калибровки необходимо периодически повторять. Это крайне нежелательно в амбулаторных условиях и в повседневной жизни, когда субъект должен использовать систему как есть, не выполняя слишком много операций, чтобы система работала должным образом.Более того, мы указали в [29], что, хотя гониометры KPF представляют собой последовательный шаг вперед в обнаружении движения с помощью электронного текстиля, небольшой гистерезис все же может повлиять на характеристики датчика.
Цель данной статьи — показать, что путем сочетания электронного текстиля и недорогого инерционного зондирования возможен ненавязчивый и надежный мониторинг движений человека. Это может быть достигнуто путем устранения недостатков двух измерений путем объединения информации, полученной от гониометров KPF и трехосных акселерометров.Идея заключается в том, что одиночные трехосные акселерометры менее дороги и сложны по сравнению с существующей полной технологией IMU и не страдают от магнитных помех. Кроме того, их можно легко прикрепить или интегрировать в конечности гониометра KPF, чтобы получить надежную и незаметную систему измерения.
Не умаляя общности, мы продемонстрировали нашу концепцию движения бедренно-большеберцового сустава, который вместе с бедром и голеностопным суставом является одним из трех основных суставов нижней конечности, позволяющих передвигаться.
Несколько исследовательских групп исследовали возможность надежной кинематической оценки коленного сустава с помощью упрощенных и сокращенных систем измерения, основанных на акселерометрах и гироскопах и избегающих использования информации магнитометров. Соответствующие исследования представлены в [23,32,33,34,35,36,37] и используют инерционную информацию, полученную с помощью двух пар акселерометр / гироскоп, которые прикреплены к сегментам бедра и голени. В большинстве цитируемых публикаций метод реконструкции основан на оценке ориентации бедра и голени для расчета угла сгибания-разгибания колена [33,35,36].Точность этих методов зависит от точности оценки ориентации, что является проблемой из-за отсутствия измерения магнитометром, и хорошего совмещения опорных систем акселерометра / гироскопа относительно опорных систем сегментов тела. Существенные результаты, среднеквадратичная ошибка (RMSE) около двух градусов по сравнению с оптической системой, были получены Favre [33] с помощью процедуры выравнивания, в которой использовалась статическая поза стоя и заранее заданные движения отведения / приведения бедра.Еще одна интересная работа была недавно представлена Seel в [23], который предложил новый метод идентификации оси сустава, который не полагается на точность, с которой субъект выполняет заранее определенные позы или движения, а также инновационный метод реконструкции. Их методика основана на интегрировании угловой скорости на идентифицированной оси сустава и последующей коррекции медленно смещающегося угла с помощью измерения акселерометра (среднеквадратичное значение трех градусов по сравнению с оптической системой отсчета).В этой работе мы предлагаем инновационное решение для реализации упрощенной и сокращенной сенсорной системы для оценки сгибания-разгибания коленного сустава. Мы используем гибридную систему, которая сочетает в себе неинерциальное угловое измерение текстильного гониометра с инерционной информацией, полученной от двух акселерометров. В частности, мы разработали и провели предварительную оценку специального подхода сенсорного слияния, основанного на реализации фильтра Калмана. В этом методе измерения акселерометра используются для корректировки угловой оценки, выполняемой гониометром KPF, путем непрерывной регулировки его параметров калибровки.Мы продемонстрировали возможности новой гибридной измерительной системы, состоящей из гониометров KPF и трехосных акселерометров, на экспериментальной установке, описанной в разделе 2. Мы построили прототип чувствительного коленного ремня с карманами, используемыми для размещения гониометра KPF, который определяет угол между сегментами бедра и большеберцовой кости, а также два IMU, прикрепленные к сегментам бедра и голени. Необработанные данные акселерометра и выходные данные KPF были обработаны методом слияния (см. Раздел 3) для оценки угла сгибания-разгибания колена.В то же время весь набор информации, полученный из IMU бедра и голени (то есть полная матрица ориентации, извлеченная путем объединения данных акселерометра, гироскопа и магнитометра), использовался в качестве стандартного эталона для тестирования нашего нового подхода. В экспериментальной сессии прототип использовался для получения данных гониометра и IMU, в то время как испытуемые выполняли различные задачи, связанные с движением коленных суставов. Для ознакомления с техникой слияния датчиков в разделе 2 описаны принципы работы устройства KPF и инерциальной сенсорной системы.1 и раздел 2.2, вместе с калибровками двух систем, необходимых для начала экспериментов. Процедура калибровки в разделе 2.1, которая определяет параметры гониометра KPF, является фундаментальной для определения начального состояния процедуры фильтра Калмана, описанной в разделе 3. В основной части статьи описывается алгоритм, улучшающий качество определения положения колена. оценка, уточняя параметры гониометра. Наконец, в Разделе 4 оценка сгибания-разгибания колена, выполненная гибридной сенсорной системой, обнаруженная в шести различных задачах движения, сравнивается с эталонной системой измерения для оценки ее характеристик.Во всем наборе тестов метод слияния показал надежные характеристики и был эффективным при измерении динамических движений колена (по испытаниям среднее и стандартное отклонение RMSE равнялось 1,96 и 0,96 градуса, соответственно). Эти результаты делают наш подход сопоставимым с другими амбулаторными измерительными системами. Результаты также продемонстрировали, что метод слияния значительно улучшил характеристики измерений отдельных классов датчиков (акселерометры и гониометры, рассматриваемые индивидуально по сравнению с другими.эталонные измерения). Кроме того, обратите внимание, что не было сделано никаких предположений о положении и ориентации акселерометра по отношению к объединенной системе отсчета. Также обратите внимание, что систему можно легко откалибровать с помощью специальной процедуры, задуманной в рамках этой работы, без необходимости выполнения пользователем сложных задач. Эти достижения и многообещающие характеристики измерения делают гибридную систему хорошим кандидатом для амбулаторных и ненавязчивых носимых измерительных систем.
2.Экспериментальная установка
Чтобы получить данные, касающиеся сгибания-разгибания бедренно-большеберцового сустава, как с гониометров KPF, так и с инерционных датчиков, был создан прототип коленного бандажа с использованием ткани Lycra. Ремешок был специально разработан с карманами для KPF и инерционного зондирования, как показано на Рисунке 1a. Как показано на рисунке 1b, колено моделировалось просто как шарнирный сустав, а угол сгибания-разгибания (θ) определялся как угол между двумя последовательными сегментами модели (т.е.е., угол между единичными векторами x кадров Ψ1 [x1, y1, z1] и Ψ2 [x1, y1, z1]). Гониометр КПФ (длина 30 см, ширина 2,5 см и толщина 1,5 мм) был интегрирован в одежду, чтобы полностью закрыть рассматриваемый стык. Принцип работы гониометра, производимого SMARTEX [38] и основанного на нашей собственной конструкции, описан в Разделе 2.1. Гониометр был откалиброван перед встраиванием в коленный бандаж в соответствии с процедурой, описанной в разделе 2.1. В одном и том же коленном бандаже два инерциальных измерительных блока (MTw от XSens, [13]) были закреплены внутри карманов на бедре (IMU1). и хвостовик (IMU2).IMU располагаются на коленном бандаже без каких-либо предположений относительно их ориентации и положения относительно сегментов коленного сустава. XSens MTws [13], используемые в экспериментах, представляют собой компактные IMU, содержащие трехмерные линейные акселерометры, трехмерные гироскопы и трехмерные магнитометры. Каждый MTw выполняет обработку сигнала в реальном времени и передает по беспроводной связи трехмерную ориентацию (Эйлера, кватернионы или матрицы вращения) и необработанные данные датчиков (ускорение, угловые скорости, ориентация магнитного поля Земли).Необработанный компонент акселерометра, доступный из сигнала IMU, использовался в сочетании с текстильным гониометром, как подробно описано в Разделе 3, далее именуемым датчиком акселерометра. Угол сгибания-разгибания колена, полученный из выходных данных IMU, может быть вычислен с учетом компонентов полной матрицы вращения, которая описывает ориентацию рамы IMU на голени относительно рамы IMU, размещенной на бедре [ 10,14]. Калибровка устройств IMU производилась по методике производителя [14].Полученный угол разгибания колена (θr) был рассмотрен в качестве эталонного измерения для оценки гибридной системы текстильного гониометра / акселерометра, которую мы предлагаем в этой работе.
Рисунок 1.
Прототип датчика и размещение датчика вокруг коленного сустава. (a ) Гониометр из двухслойной трикотажной пьезорезистивной ткани (KPF) и два инерционных измерительных блока (IMU) были нанесены на коленную повязку; ( b ) Геометрическая схема опорных кадров, закрепленных с помощью сегментов тела и IMU.Колено было просто смоделировано как шарнирный сустав, а угол сгибания-разгибания (θ) был определен как угол между двумя последовательными сегментами модели (т. Е. Угол между единичными векторами x Ψ1 [x1, y1, z1] и Ψ2 [x1, y1, z1] фреймы). Опорные кадры IMU и акселерометра (Ψa1 [xa1, ya1, za1] и Ψa2 [xa2, ya2, za2]) не выровнены с соответствующим опорным кадром сегмента.
Рисунок 1.
Прототип датчика и размещение датчика вокруг коленного сустава. (a ) Гониометр из двухслойной трикотажной пьезорезистивной ткани (KPF) и два инерционных измерительных блока (IMU) были нанесены на коленную повязку; ( b ) Геометрическая схема опорных кадров, закрепленных с помощью сегментов тела и IMU.Колено было просто смоделировано как шарнирный сустав, а угол сгибания-разгибания (θ) был определен как угол между двумя последовательными сегментами модели (т. Е. Угол между единичными векторами x Ψ1 [x1, y1, z1] и Ψ2 [x1, y1, z1] фреймы). Опорные кадры IMU и акселерометра (Ψa1 [xa1, ya1, za1] и Ψa2 [xa2, ya2, za2]) не выровнены с соответствующим опорным кадром сегмента.
Для сбора данных о кинематике коленного сустава в экспериментальных сеансах браслет носили пять здоровых субъектов, которым было предложено выполнить несколько задач, сгруппированных в набор из шести испытаний и повторенных три раза.В первых двух испытаниях испытуемых просили выполнять движения сгибания-разгибания в коленях с разной скоростью в моноподальном контралатеральном положении. Во время этих фаз испытуемых просили сгибать / разгибать колено примерно в диапазоне 0–90 °. Последние четыре испытания касались ходьбы с нарастающей скоростью. Испытуемых просили свободно ходить по прямой в течение примерно 40 секунд, начиная с медленной ходьбы (первое испытание) до очень быстрой ходьбы (четвертое испытание). Испытуемые могли свободно выбирать скорости без внешних ограничений.Перед началом сбора полного набора данных каждого испытуемого попросили выполнить простые движения, необходимые для совмещения рам акселерометра бедра и голени, в соответствии с протоколом калибровки, описанным в разделе 2.2. Выходные данные гониометра KPF собирались через специальный беспроводной электронный блок, и данные собирались с частотой 100 Гц и передавались на удаленный компьютер для обработки. Частота дискретизации IMU была установлена на 100 Гц, и данные (необработанные выходные данные акселерометра и ориентация, выраженная в виде матрицы вращения) были переданы по беспроводной связи на тот же компьютер.Данные IMU и гониометра были синхронизированы с помощью специального программного обеспечения XSens. После записи выходных сигналов датчиков наш алгоритм оценки угла сгибания-разгибания колена, который объединяет данные гониометра KPF и акселерометров (описанных в разделе 3), запускается на удаленном ПК в автономном режиме. Угол сгибания-разгибания колена (θ), определенный на рисунке 1b, был извлечен методом слияния, примененным к выходным сигналам гониометра и акселерометра с одинаковой частотой обновления входных сигналов (100 Гц).
2.1. Гониометры KPF
В этом разделе кратко описываются предыстория и принцип работы гониометра KPF, использованного в наших экспериментах. Как описано в наших предыдущих исследованиях [29,30,31] и показано на рисунке 2, наши текстильные гониометры были разработаны путем соединения двух пьезорезистивных слоев через электроизоляционный слой. Чувствительные слои были изготовлены из трикотажных пьезорезистивных тканей (KPF), ранее использовавшихся в качестве однослойных датчиков деформации для мониторинга биомеханических и сердечно-легочных параметров [39,40].
Рисунок 2.
Принципиальная схема двухслойного гониометра КПФ. Черные полосы представляют два идентичных пьезорезистивных слоя, а серая полоса — изолирующий слой. Когда датчик находится в горизонтальном положении, разница сопротивлений (ΔR) между двумя слоями равна нулю. Когда датчик изгибается, ΔR пропорционально углу изгиба (θ), определяемому как угол между касательными плоскостями к концам датчика (зеленая пунктирная линия на рисунке).
Рисунок 2.
Принципиальная схема двухслойного гониометра КПФ. Черные полосы представляют два идентичных пьезорезистивных слоя, а серая полоса — изолирующий слой. Когда датчик находится в горизонтальном положении, разница сопротивлений (ΔR) между двумя слоями равна нулю. Когда датчик изгибается, ΔR пропорционально углу изгиба (θ), определяемому как угол между касательными плоскостями к концам датчика (зеленая пунктирная линия на рисунке).
В идеале, если бы два слоя KPF были геометрически и электрически эквивалентны, выходной сигнал датчика, представленный разницей сопротивления между двумя чувствительными слоями (ΔR), исчезает, когда устройство является плоским, и пропорционален углу изгиба (θ), за исключением бесконечно малая функция второго порядка [29]: на практике уравнение (1) не проверяется из-за различий в электрических свойствах двух пьезорезистивных слоев.В [29] зависимость θ от ΔR может быть разумно аппроксимирована следующей линейной функцией:
где sθ и ΔR0 представляют чувствительность и смещение гониометра соответственно. Значения угла θ можно объяснить уравнением (2) как:
θ = ΔR − ΔRosθ = c1ΔR + c2
(3)
В уравнении (3) параметры c1 и c2 остаются неизвестными, и для их определения необходимо выполнить начальную калибровку. Обратите внимание, что c1 и c2 — это переменные процесса в фильтрации Калмана, описанной в разделе 3.1 и что их первоначальная оценка, таким образом, является нулевым статусом для итеративного процесса уточнения данных. Согласно уравнению (3), получая ΔR1 и ΔR2 в двух разных угловых положениях θ1 и θ2, можно вычислить c1, c2 как:
c1 = c1,0 = θ1 − θ2ΔR1 − ΔR2c2 = c2,0 = ΔR1θ2 − ΔR2θ1ΔR1 − ΔR2
(4)
Перед началом сбора данных в наших испытаниях гониометр был откалиброван в двух угловых положениях (θ1 = 0θ и θ2 = 90∘), чтобы получить значения c1,0 и c2,0 для подпитки цикла Калмана. i).Чтобы проверить надежность процедуры калибровки акселерометра, введем следующую метрику:
misS (R) = ∥RST − I∥2
(7)
Где R, S — специальная ортогональная матрица, а I — единица в R3 × 3. Функция несовпадения misS: SO3 → R + является действительной картой, определенной на ортогональных фреймах (столбцах R), и благодаря неравенству треугольника можно доказать, что ее значения лежат в диапазоне [0,2]. Для misS (R) = ∥RST-I∥2 = 0 матрицы R и S полностью выровнены, в то время как для misS (R) = 2 матрицы R и S «интуитивно» полностью несовмещены.Функция misS указывает на надежность представленного метода калибровки акселерометров. В частности, мы приняли метрику misS для сравнения калибровочных матриц между датчиком акселерометра и сегментами с соответствующими калибровочными матрицами IMU, полученными с помощью стандартной процедуры, предоставленной производителем. Ниже показан результат совмещения акселерометра и рамы IMU, установленной на хвостовике. Матрица калибровки от датчика к сегменту, полученная из XSens MTw, имеет следующий вид:
S = 0.2) держит:
R = 0,97660,0356-0,2120-0,02240,99770,06450,2138-0,05830,9751
(9)
Поскольку IMU и акселерометры относятся к одной и той же системе отсчета, рассогласование перед калибровкой может быть определено с учетом, в карте misS, никаких преобразований, примененных к сигналу акселерометра (т. Е. R = I), и той же самой матрицы калибровки IMU между датчиком и сегментом. S. В этом случае выполняется функция рассогласования:
misS (I) = ∥IST − I∥2 = 0,214
(10)
Используя матрицу R, сгенерированную в процессе калибровки, получаем:
misS (R) = ∥RST − I∥2 = 0.016
(11)
Что гарантирует, что Ψ2 и Ψa2 на практике выровнены. Аналогичные результаты были получены для юстировки акселерометра по всей серии испытаний, проведенных в данной работе.
4. Результаты
В этом разделе угол разгибания сгибания колена, оцененный гибридной системой, полученный путем объединения данных гониометра и акселерометра, как описано в Разделе 3, сравнивается с выходными данными эталонной системы измерения (полученный угол разгибания сгибания колена ИДУ).Кроме того, чтобы подчеркнуть улучшение нашей техники слияния, представлено сравнение между надежностью нашего метода (гибридная система и IMU) и ошибками, допускаемыми отдельными датчиками (например, акселерометры по сравнению с IMU и текстильный гониометр по сравнению с IMU). На рисунке 5 сравниваются результаты нашей методики оценки и эталонной системы измерения на двух репрезентативных графиках, взятых из испытаний на медленное и быстрое моноподальное сгибание (рисунок 5a, b). На рисунке 6 показано такое же сравнение для репрезентативных графиков четырех условий ходьбы, отсортированных от самого медленного (Рисунок 6a) до самого быстрого (Рисунок 6d).Как видно из рисунков 5 и 6, наша методика оценки показывает надежную работу и хорошую способность отслеживать движения колена как в медленных, так и в быстрых задачах.
Рисунок 5.
Динамическое сравнение нашей методики оценки и эталонного измерения во время контрлатеральных моноподальных задач стоя с разными скоростями сгибания-разгибания колена. Синяя линия представляет нашу оценку, а красная линия — эталонное измерение. ( a ) Медленное сгибание колена; ( b ) Быстрое сгибание в коленях.
Рисунок 5.
Динамическое сравнение нашей методики оценки и эталонного измерения во время контрлатеральных моноподальных задач стоя с разными скоростями сгибания-разгибания колена. Синяя линия представляет нашу оценку, а красная линия — эталонное измерение. ( a ) Медленное сгибание колена; ( b ) Быстрое сгибание в коленях.
Для шести рассмотренных испытаний (медленное сгибание, быстрое сгибание и четыре условия ходьбы с увеличивающейся скоростью) мы вычислили отклонение между оценкой, выполненной предлагаемым методом, примененным к гибридной системе (θhy), и эталонным измерением (θr, извлеченным из IMU) с точки зрения среднеквадратичной ошибки (RMSE).Аналогичным образом, мы оценили RMSE гониометра KPF (θg) и акселерометра (θa) по сравнению с эталонной системой измерения. Соотношения, описывающие отклонения RMSE, представлены в следующих уравнениях:
RMSEmi, j = ∥θri, j − θmi, j∥2 = 1Ki, j∑k = 1Ki, jθri, j (k) −θmi, j (k) 2
(28)
RMSEmi = 1N∑j = 1NRMSEmi, j
(29)
где i представляет i-е испытание (i = 1 медленное сгибание, i = 2 быстрое сгибание, i = 3 самая медленная ходьба, i = 6 самая быстрая ходьба), j обозначает разные испытуемые, N = 5 — количество испытуемых, Ki, j — количество образцов i-го испытания для j-го субъекта, а суффикс m указывает на различные системы измерения.В частности, m = hy справедливо для гибридной системы, m = g для гониометра, а m = acc относится к акселерометрам. Данные, полученные из статистического уравнения (29), представлены в таблице 1 со средним значением μ и стандартным отклонением σ, вычисленными по шести испытаниям (последние два столбца таблицы 1).
Рисунок 6.
Динамическое сравнение нашей методики оценки и эталонного измерения во время ходьбы с разными скоростями. Скорости увеличиваются с ( a ) до ( d ).Синяя линия представляет нашу оценку, а красная линия — эталонное измерение.
Рисунок 6.
Динамическое сравнение нашей методики оценки и эталонного измерения во время ходьбы с разными скоростями. Скорости увеличиваются с ( a ) до ( d ). Синяя линия представляет нашу оценку, а красная линия — эталонное измерение.
Таблица 1.
Среднеквадратичные ошибки (RMSE), полученные в шести испытаниях для различных методов оценки.Первая строка (RMSEhy) сообщает об ошибках гибридной системы с применением техники слияния, описанной в этой статье. Второй и третий ряды показывают погрешности текстильного гониометра (RMSEg) и акселерометра (RMSEacc). В последних двух столбцах указаны среднее значение и стандартное отклонение RMSE по испытаниям для различных систем измерения.
| Медленное сгибание | Быстрое сгибание | Ходьба № 1 | Ходьба № 2 | Ходьба № 3 | Ходьба № 4 | Среднее значение | Стандартное | |
|---|---|---|---|---|---|---|---|---|
| (самое медленное) | (Самый быстрый) | Значение μ | Отклонение σ | |||||
| RMSEhy | 0.97∘ | 3,50∘ | 1,07∘ | 1,6∘ | 2,1∘ | 2,5∘ | 1,96∘ | 0,96∘ |
| RMSEg | 5,12∘ | 4,6352 | 4,6 ∘ | 5,5∘ | 5,7∘ | 5,15∘ | 0,47∘ | |
| RMSEacc | 1,48∘ | 10∘ | 5,80∘ | 6,7∘3 | 2,87∘ |
5.Обсуждение
Надежная работа нашей гибридной системы подтверждается результатами, приведенными в первой строке таблицы 1. Среднее и стандартное отклонения RMSE составляют 1,96 и 0,96 соответственно. Минимальное отклонение было обнаружено в эксперименте с медленным сгибанием (RMSEhy1 = 0,97∘), а максимальное отклонение было в эксперименте по быстрому сгибанию (RMSEhy2 = 3,5∘). Отклонения в задачах ходьбы варьируются от 1,07 ° для самого медленного задания до 2,5 ° для самого быстрого. Первая строка таблицы 1 и рисунков 5 и 6 подчеркивает, что в гибридной системе RMSE увеличивается с увеличением скорости движения.Кроме того, испытания быстрой ходьбы показывают меньшую ошибку, чем испытания быстрого сгибания при моноподальном стоянии (что можно увидеть, сравнивая рисунки 5b и 6d и соответствующие RMSE в таблице 1). Это подтверждается тем фактом, что максимальная ошибка была в испытании быстрого сгибания-разгибания в коленном суставе, показанном на рисунке 5b. Эту проблему можно хорошо объяснить, рассмотрев методику оценки, описанную в разделе 3.1. Действительно, в испытании на быстрое сгибание, выполняемом на максимальной скорости в диапазоне [0–90 °], ускорение вращения, измеренное акселерометром на хвостовике, далеко не является малым по сравнению с гравитационным и поступательным вкладом.Меньшую ошибку при ходьбе можно объяснить тем, что во время ходьбы, даже на высоких скоростях, вращательное ускорение достаточно мало. Сравнение с современной литературой показывает, что измерения углов суставов с помощью коммерческих твердотельных электрогониометров, широко используемых для амбулаторной оценки диапазона движений и частоты движения / скорости / ускорения суставов как для клинических, так и для профессиональных оценок [47, 48], показывает ошибки более двух градусов, с сильной зависимостью от положения датчика и перекрестных помех между суставами [49].Уменьшенные системы зондирования, описанные в разделе 1 [23,32,33,34,35,36,37] и основанные на двух парах акселерометр / гироскоп, достигли средних значений RMSE в диапазоне [2 – 7∘]. дальнейший анализ для количественной оценки улучшений, внесенных методом объединения датчиков по отношению к отдельным подсистемам зондирования (т. е. акселерометрам и гониометрам, применяемым по отдельности без объединения информации). RMSE, относящиеся к оценке угла сгибания-разгибания колена гониометром, приведены во второй строке таблицы 1.Среднее и стандартное отклонения RMSE составляют 5,15∘ и 0,47∘ (в соответствии с результатами, полученными нами в предыдущей работе по угловым измерениям текстильного гониометра [29]). Кроме того, с учетом того, как работает гониометр KPF, изменчивость RMSE в испытаниях, выполненных на разных скоростях, довольно низка. Среднеквадратичные значения акселерометра указаны в третьей строке таблицы 1. Среднее и стандартное отклонение ошибки составляют 6,55∘ и 2,87∘, и, как и ожидалось, существует сильная зависимость от скорости выполнения испытания (от 1.48∘ для медленного сгибания до 10∘ для быстрого сгибания). Последние два столбца таблицы 1 подчеркивают, что ошибка, вносимая гибридной системой (μ = 1,96 ∘, σ = 0,96), оцененная в терминах RMSE, значительно меньше, чем обе средние ошибки гониометра (μ = 5,15). , σ = 0,47∘) и среднее значение акселерометров (μ = 6,55∘, σ = 2,87∘). Кроме того, погрешность гибридной системы меньше, чем у систем гониометра и акселерометра в каждой из рассмотренных задач. На рисунке 7 показана оценка угла vs.эталонный метод слияния, сделанный на гибридной системе, и соответствующая оценка, сделанная с помощью гониометра и акселерометров по отдельности (репрезентативные графики задач моноподального сгибания и ходьбы) .В сигнале акселерометра ошибки связаны с пиками ускорения, которые присутствуют, когда изменение направления движения и при взаимодействии с окружающей средой (например, когда ступня ударяется об пол при ходьбе) и, таким образом, оправдывают большое среднее значение RMSE и соответствующее стандартное отклонение.И наоборот, на сигнал гониометра влияют ошибки из-за ограничения, вносимого использованием номинальных параметров калибровки и небольшого гистерезиса, который привел к ошибке, указанной в таблице 1. В заключение, наш метод слияния компенсирует эти ошибки и последовательно повышает точность оценки по отдельным подсистемам зондирования.
Рисунок 7.
Сравнение сигналов между реконструкцией угла акселерометрами (зеленая пунктирная линия), гониометром (черная пунктирная линия), гибридной системой (акселерометр + гониометр, синяя сплошная линия) и эталонным измерением.( a ) Ходьба; ( b ) Быстрое сгибание.
Рисунок 7.
Сравнение сигналов между реконструкцией угла акселерометрами (зеленая пунктирная линия), гониометром (черная пунктирная линия), гибридной системой (акселерометр + гониометр, синяя сплошная линия) и эталонным измерением. ( a ) Ходьба; ( b ) Быстрое сгибание.
Одним из ограничений текущего исследования является то, что гибридная система и метод слияния оценивались по инерционным единицам измерения.Хорошо известно, что золотым стандартом в биомеханике является оптическое отслеживание на основе маркеров. Системы оптического захвата движения, основанные на внешних маркерах, широко использовались при анализе походки и показали для угла сгибания-разгибания коленного сустава среднеквадратичные отклонения порядка 2 ° по сравнению с маркерами, фиксированными на кости [50]. Однако мы решили оценить нашу систему по отношению к эталону IMU, чтобы мы могли отслеживать активность испытуемого в неограниченной среде (задания на свободную ходьбу, продолжительность которых составляла около 40 секунд).В любом случае, сейчас мы начали оценивать гибридную систему в повседневной жизни субъектов, где ссылка на IMU представляет собой единственный допустимый вариант. С другой стороны, как показано в [15], оценка угла коленного сустава с помощью системы на основе IMU, которую мы использовали, показала надежную работу (ошибки порядка двух градусов). Второе ограничение, которое мы в настоящее время устраняем. , заключается в том, что для каждого сустава можно контролировать только одну степень свободы. Вращение колена в горизонтальной плоскости мы не рассматривали, так как на гониометры КПФ скручивание не влияет.Из [29], где полная форма соотношения Уравнение (1) представлено в форме разложения Тейлора, можно проверить, что нет члена производной второго порядка и, следовательно, что выходной сигнал гониометра ΔR не зависит от его кручения. . Для обнаружения перекрута коленного сустава необходим другой гониометр, который помещают в перекрещенное положение, при этом одна конечность находится на бедре, а другая — на голени. В нашем решении глобальная кривизна второго гониометра связана с кручением колена.В настоящее время мы работаем над моделированием этой конфигурации датчиков и над стратегией относительной калибровки.
Гониометрия перманентного клея из ракушечника обыкновенного на основе конфокальной микроскопии
СВОДКА
Биологические клеи представляют собой материалы, представляющие особый интерес в области биотехнологий и исследований противообрастающих материалов. Адгезиву взрослых ракушек на протяжении многих лет уделялось много внимания; однако постоянный клей циприда — стадия колонизации ракушек — материал, о котором в настоящее время известно очень мало.Мы применили конфокальную лазерную сканирующую микроскопию для измерения углов контакта между постоянным клеем личинок ракушечника и самоорганизующимися монослоями ОН- и СН 3 -концевых тиолов. Измерение углов смачивания между реальными биоадгезивами и поверхностями ранее никогда не проводилось, и данные могут дать представление о физико-химических свойствах и механизме действия этих функциональных материалов. Клей представляет собой двухфазную систему пост-секреции, при которой поведение компонентов регулируется отдельно химией поверхности.Полученные данные свидетельствуют о том, что процесс перманентной адгезии циприд является более сложным, чем считалось ранее, что требует широкой переоценки системы. Улучшение понимания будет иметь важные последствия для производства покрытий, устойчивых к ракушкам, а также для разработки биоиндуцированных клеев для нишевых приложений.
СНОСКИ
ВЗНОС АВТОРОВ
Н.А. отвечал за концепцию экспериментов и их практическое выполнение.N.V.G. отвечал за микроскопию, методы и техническое применение. L.P. произвела SAM и предоставила техническую поддержку. Б.О. произвел и предоставил личинки карповых. T.E., A.M., D.R, B.L. и A.S.C. предоставил надзорную экспертизу и критическую оценку.
КОНКУРЕНТНЫЕ ИНТЕРЕСЫ
Нет заявленных конкурирующих интересов.
ФИНАНСИРОВАНИЕ
Эта работа финансировалась главным образом за счет гранта N62909-11-1-4005 Управления военно-морских исследований, предоставленного N.A. Финансовая поддержка также признательна грантами Управления военно-морских исследований N00014-08-1-1240 для A.S.C., N00014-11-1-0180 и N00014-12-1-0365 для D.R. и N00014-11-1-0183 на имя A.M. и Н.В.Г. Л.П., Т.Е. и Б. подтверждаем получение финансирования в рамках Седьмой рамочной программы Европейского сообщества FP7 / 2007-2013 в соответствии с соглашением о гранте № 237997 (SEACOAT).
- © 2013. Издано компанией «Биологи Лтд.».
Лаборатория наук об океане Бигелоу
Использование передовых технологий
Центр аналитических услуг Бигелоу (BAS) расположен на территории исследовательского и образовательного кампуса лаборатории Бигелоу в г. Ист-Бутбей, штат Мэн.Современный центр предоставляет аналитические услуги государственным и частным организациям. Эта передовая технология доступна местным, национальным и международным исследователям во всех областях исследований, включая морскую химию, аквакультуру, фармацевтику и рыболовство. Наши опытные ученые и техники своевременно проводят испытания высочайшего качества.
Микроскопия
Конфокальный лазерный сканирующий микроскоп:
Конфокальный лазерный сканирующий микроскоп Zeiss LSM 700 (CLSM) доступен на платной основе.Эта система оснащена инвертированным микроскопом Zeiss, оснащенным системой лазерного сканирования с четырьмя лазерами для расширенной визуализации эукариотических и прокариотических клеток в различных условиях.
Основные характеристики CLSM:
- Zeiss Axio Observer. Полностью автоматизированный инвертированный микроскоп Z1 с моторизованным предметным столиком XYZ с возможностью визуализации светлого поля, ДИК и эпифлуоресценции
- Объективы: 10x, 20x, 40x (сухой), 40x (вода) и 63x (масло)
- Четыре лазерные линии на 445 нм, 488 нм, 555 нм и 639 нм с двумя каналами обнаружения.
- Новое программное обеспечение Zeiss ZEN для полнофункционального управления визуализацией и анализом изображений.
Дополнительные функции:
- Стенд с регулируемой температурой для проведения экспериментов по инкубации.
- Микроманипуляторная система Eppendorf TransferMan NK2. Эта полностью автоматизированная система позволяет захватывать отдельные клетки и манипулировать ими для переноса, изоляции или генетических манипуляций.
Этот полнофункциональный микроскоп позволяет одновременно получать изображения четырех разных флуоресцентных материалов, делать оптические срезы и реконструировать трехмерное изображение, обеспечивать возможность фотообесцвечивания, покадровую визуализацию, мозаичное отображение изображений, а также другие приложения, совместимые с высококачественным CSLM.Систему также можно использовать для проведения исследований по времени, включая покадровую визуализацию, непосредственно на микроскопе и проведения манипуляций с отдельными клетками.
Изображение 1: изображение морской биопленки фотосинтетических цианобактерий (красная автофлуоресценция), растущих на фоне бактерий (окрашено синим цветом). Кредит Джойс Макбет.
Изображение 2: Leptothrix cholodnii, бактерия в оболочке; оболочки окрашиваются в красный цвет малеимидным красителем, специфичным для сульфгидрильных (-SH) групп, в то время как клетки окрашиваются в зеленый цвет красителем для нуклеиновых кислот.Предоставлено: Эми Лэнгдон и Эмили Флеминг.
Электронный микроскоп:
Электронный микроскоп оснащен (1) просвечивающим электронным микроскопом (ПЭМ) Zeiss 902A, оснащенным системой EELS, и (2) автоэмиссионным сканирующим электронным микроскопом (СЭМ) Zeiss Supra25. ТЕМ оснащен гониометром для вращения / наклона секций, микроскоп имеет как цифровые, так и пленочные системы камер, а приставка EELS позволяет проводить элементный анализ, удалять неупругие электроны для лучшего разрешения и исследовать полутолстые срезы (до 600 нм).Возможности гониометра и толстого сечения являются отличными инструментами для создания изображений стереопары из срезов клеток средней толщины, и их можно использовать для восстановления трехмерных моделей клеток. TEM поддерживается двумя ультрамикротомами, новым RMC PT-X и более старым Reichert Ultracut E. Ожидается, что отдельные ученые приобретут собственные алмазные ножи для резки тонких срезов. Автоэмиссионный СЭМ обеспечивает получение изображений сверхвысокого качества и оснащен STEM, энергодисперсионным рентгеновским спектрофотометром (EDS) и дифракционными приставками Робинсона.STEM (сканирующая просвечивающая электронная микроскопия) создает изображения SEM одновременно с изображениями в прошедшем электронном свете при просмотре определенных электронно-прозрачных материалов (например, ячеек на сетке). EDS используется для изучения элементного состава, особенно биологических материалов. Дифракция Робинсона дает элементный состав, особенно для металлических предметов. Комплект EM включает настольную установку для нанесения покрытий / испаритель Denton Vacuum (Desk IV, с угольным аксессуаром). Этот инструмент покрывает сетки и образцы SEM углеродом или различными металлами (например.г., золото, платин, вольфрам). На предприятии также есть станок для изготовления стеклянных ножей LKB, рассекающий микроскоп Zeiss SV8, оснащенный кольцевой подсветкой для исследования шлейфов и решеток, шкала Метлера, pH-метр, печь для заливки, холодильник с морозильной камерой, вакуумный насос и т. Д.
Пользователи, желающие работать с системой, должны будут продемонстрировать умение, прежде чем им будет разрешено работать без присмотра. Плата за луч составляет 50 долларов в час. Ожидается, что пользователи предоставят свои собственные расходные материалы (например, решетки, заглушки, пятна).
Аналитическая служба Bigelow
Д-р Стивен Арчер, директор
Карлтон Раушенберг, менеджер
Телефон: +1 207 315-2567, доб. 514
BAS открыт для запросов о новых подходах и анализах. Пожалуйста, напишите доктору Стиву Арчеру для получения дополнительной информации. Щелкните ссылки ниже, чтобы получить более подробную информацию об услугах BAS.
Гибкая система полевого гониометра: гониометр для портативного портативного гиперспектрального отражения Земли
Сообщество, занимающееся дистанционным зондированием, прилагает большие усилия для калибровки и проверки датчиков, измерений и производных продуктов для количественной оценки и уменьшения неопределенностей.С учетом последних достижений в проектировании приборов, радиометрической калибровке, атмосферной коррекции, разработке алгоритмов, разработке продуктов, валидации и доставке, отсутствие стандартизации терминологии и продуктов по отражательной способности становится значительным источником ошибок. Эта статья обеспечивает полный доступ к основной концепции и определениям величин отражательной способности, данным Никодемусом и др. [Никодемус, Ф.Э., Ричмонд, Дж. К., Хсиа, Дж. Дж., Гинзберг, И. В., и Лимперис, Т. (1977). Геометрические соображения и номенклатура отражения.В: Национальное бюро стандартов, Министерство торговли США, Вашингтон, округ Колумбия. URL: http://physics.nist.gov/Divisions/Div844/facilities/specphoto/pdf/ geoConsid.pdf.] И Martonchik et al. [Мартончик, Дж. В., Брюгге, К. Дж., И Стрэлер, А. (2000). Обзор номенклатуры отражательной способности, используемой в дистанционном зондировании. Обзоры дистанционного зондирования, 19, 9–20]. Термины отражательной способности, такие как BRDF, HDRF, BRF, BHR, DHR, альбедо черного неба, альбедо белого неба и альбедо голубого неба, определены, объяснены и проиллюстрированы на примерах, при этом концептуальные величины отделены от измеримых.Мы используем избранные примеры из рецензируемой литературы, чтобы продемонстрировать, что очень часто текущее использование терминологии отражательной способности не соответствует физическим стандартам и может привести к систематическим ошибкам. Во-вторых, в документе подчеркивается важность правильного использования определений путем количественного сравнения различных продуктов отражения с особым упором на эффекты, зависящие от длины волны. Величины отражательной способности, полученные в условиях полусферического освещения (т. Е. При всех измерениях вне помещения), зависят не только от рассеивающих свойств наблюдаемой поверхности, но также от атмосферных условий, окружения объекта и топографии, с отчетливым выражением этих эффектов в различных длинах волн. .Мы приводим примеры различий между величинами полусферической и направленной освещенности на основе наблюдений (т. Е. MISR) и моделирования отражательной способности естественных поверхностей (т. Е. Растительного покрова и снежного покрова). Чтобы улучшить текущую ситуацию с частым неоднозначным использованием терминов и величин коэффициента отражения, мы предлагаем стандартизировать терминологию в описаниях продуктов, отражающих коэффициент отражения, и чтобы сообщество тщательно использовало предложенную терминологию коэффициента отражения в научных публикациях.
Исследование с помощью нейтронного гониометра предпочтительной ориентации кальцита в мелкозернистом глубоководном карбонате
В слабо затвердевших, богатых наноносами глубоководных карбонатах глубоководных карбонатах скорость волны сжатия в два раза выше параллельно слою, чем по нормали к нему . Было высказано предположение, что эта анизотропия связана с выравниванием осей кальцита c перпендикулярно экранам кокколитов и отложением экрана параллельно слоистости. Эта гипотеза была проверена путем измерения предпочтительной ориентации (ткани) осей кальцита c в акустически анизотропных известковых образцах осадков DSDP с помощью рентгеновской гониометрии, и было обнаружено, что максимальные концентрации c по оси слишком велики. низкий, чтобы объяснить анизотропию.
Рентгеновский метод подвержен ряду неточностей из-за подготовительных и технических недостатков в слабо затвердевших породах.